







介绍
惯性导航系统(Inertial Navigation System - INS)是一种不依赖外部输入信息、也不向外辐射能量的自助式导航系统,是通过陀螺仪和加速度计为敏感器件的导航参数解算系统。该系统根据陀螺仪输出建立导航坐标系,根据加速度计输出解算出运载体在导航坐标系中的速度和位置。通常来讲,惯性导航系统一般包括计算机及含有加速度计、陀螺仪或其他运动传感器的平台或模块。目前的ADAS系统一般会有加速度计、陀螺仪、压力传感器和磁力仪邓类型的惯性传感器的运用。加速度计用来测量运动物体的加速度大小和方向,通过对时间的一次积分得到速度,速度在对时间进行一次积分可以得到位移;陀螺仪用来测量运动物体围绕各个坐标轴的转角速率值,通过四元数角度解算形成导航坐标系,使加速度计测量值投影到该坐标系中,可输出航向和姿态角;磁力仪用来测量测量磁场强度和方向,定位运动物体的方向,通过地磁向量得到误差表征量,可反馈到陀螺仪的姿态解算中,用以校准陀螺仪的漂移。
工作原理
惯性导航的基本工作原理是通过测量载体在惯性参考系的加速度,将它对时间进行积分并且把它变换到导航坐标系中,就能够得到在导航坐标系中的速度、偏航角和位置等信息。惯性导航系统是一种不依托外在参考系的自主式导航系统。惯性系统导航适用陀螺仪测量物体的角速度,一方面通过四元数角度解算形成资助的导航坐标系,另一方面计算得到物体的航向和姿态角。在形成的导航坐标系中,加速度计首先测量物体的加速度,其次对该加速度进行一次积分和二次积分得到在该坐标系中的速度和位移。
在实际应用中,由GPS或其他导航系统给出物体当前的准确初始位置以及速度,惯性导航系统可以实现从陀螺仪和加速度计中解算出速度和位移,从而不断更新物体的当前位置和速度。初始位置和速度给定的情况下,惯性导航系统的优势在于不依靠外部参照坐标系就可以实现自主导航。惯性导航系统具体的结算过程包括惯性速率和惯性位置两个层面。与其他导航系统相比,惯性导航系统是唯一具备自主导航能力的系统。其特性在于既不需要外界信号,也不需要连续接收外部信号。该特性使得惯性导航系统不仅隐蔽性好,而且能够在复杂的电磁环境和外界干扰下正常工作和精准定位。
特点
惯性导航系统在自动驾驶汽车上由以下主要优点:
1. 自主式导航。不依靠外部参照,给定初始值使用自身的运动传感器即可解算出物体当前的位置和速度;
2. 环境适应性强。惯性导航系统的工作原理决定了其能在各种极端的环境条件和地理位置下仍然能够保证良好的工作性能。
3. 导航信息延迟低。该系统可以实时从陀螺仪和加速度计中解算出速度和位移,从而不断更新物体的位置、速度、航向和姿态角数据。
优点十分明显,缺点也同样突出:
1. 长期精度差。由于该系统解算物体的运动信息使用的是一次积分和二次积分,误差随着时间增长而增大,所以需要外部信息进行修正,提高系统的稳定可靠性。
2. 使用前进行初始校准时间长。
3. 设备成本高。
4. 缺少时间信息。
应用场景
惯性导航系统数据更新率高,导航信息延迟低,而且系统稳定不易受到外界干扰的特点使其可以给自动驾驶的数据中心提供准确的车辆位置和行驶速度信息,进而更好的宏观调控数据处理。惯性导航系统在自动驾驶系统中主要由三个关键作用:
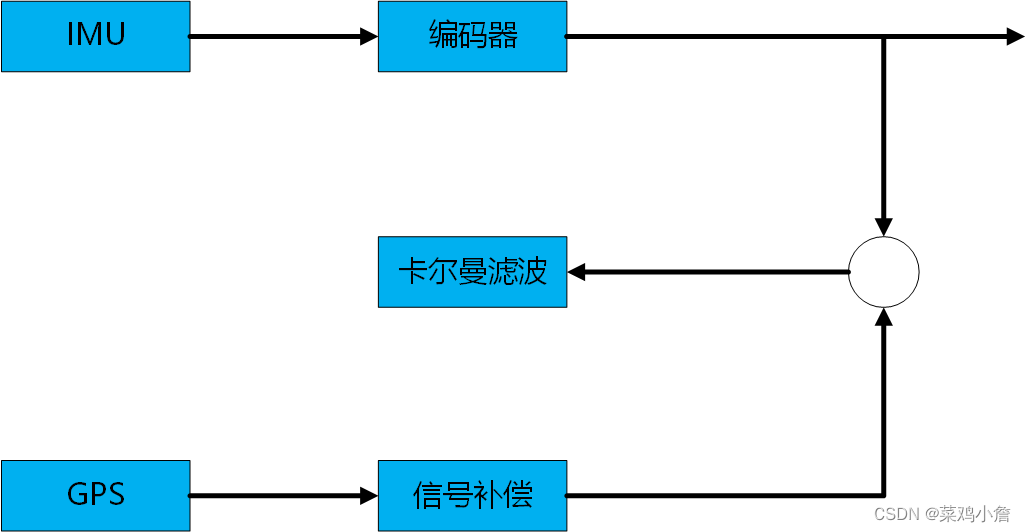
1. 辅助全球卫星导航系统进行高精度定位。在GPS信号丢失或者很弱的场景下,包括但不限于隧道、高架桥、地下车库等驾驶场景,惯性导航系统的及时启用,可实现不依赖额外的外界信息输入,暂时充当车辆的“眼睛”,使用自身携带的运动传感器和运动方程解算出真实的位置和速度信息,弥补GPS系统信号丢失造成的影响。GNSS + IMU方案是最常用的设计组合惯性导航系统的技术方案。GNSS虽然可以提高精准的定位,但在卫星信号较弱的场景下会导致定位信息延迟而造成不可预知的失控场景;惯性导航系统虽然可以不依托外在信息,无惧极端环境下的影响,但是长期时间的运作会导致系统累计误差越来越大。将GNSS和IMU的优势结合齐爱,形成组合惯性导航系统,可以发挥两种不同系统的优势,提高导航系统的健壮性。其算法示意图如下:
2. 配合激光雷达进行定位。在第一个场景中,组合惯性导航系统可以给激光雷达的位置和脉冲发射的姿态提供高精度信息,帮助建立激光雷达的点云的三维坐标系。实际应用中,自动驾驶系统首先通过GPS获取初始位置信息,在通过惯性导航和车辆的编码器配合得到车辆的初始位置;其次对激光雷达实时扫描单词的点云数据进行特征提取,结合初始信息进行空间变化,获取基于全局坐标系下的矢量特征;最后将初始位置信息、激光雷达的特征跟高精度地图下的特征信息进行匹配,进而获取一个准确的定位。
3. 辅助主动车距控制巡航系统(ACC)预测路径。惯性导航系统与ACC联合预测路径并将该路径连接到障碍物的检测上实现主动的车距控制。惯性导航系统还可以实现坡道上的车辆姿态控制。该装置让低重力传感器利用向下的重力方向来确定倾斜度,使坡上的车辆不会向后滑动,进一步提高系统的爬坡性能。


















 3134
3134

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











