







介绍
本文重点介绍的内容不针对某个功能,而是针对泊车功能的整体表现。本文属于持续更新的内容,如果有伙伴想了解的话,烦请点个收藏,方便后续的阅读。如果出现了不同意见,欢迎大家留言讨论。目前该文讨论的内容均是基于规则的自动驾驶方案,端对端的自动驾驶方案不在此文讨论范围内。
问题1 —— 视图显示问题
随着功能的增加,各个功能之间对于中控屏的显示请求可能存在缺陷。基于现在的自动驾驶方案,功能的运行基本基于既有规则展开,那么必然会存在同时满足的情况。例如:在APA功能开启的过程中,切换至R档,此时退出功能,系统的表现应该如何?根据推荐国标《汽车全景影像监测系统性能要求及试验方法》来讲,R档状态下必须强制开启AVM功能。如果前期设计的过程中,系统需求未定义此问题,开发人员对相关功能整体的表现不清晰的情况下,这点就容易出现问题。接着例子,我们画一个时序图进行了解。
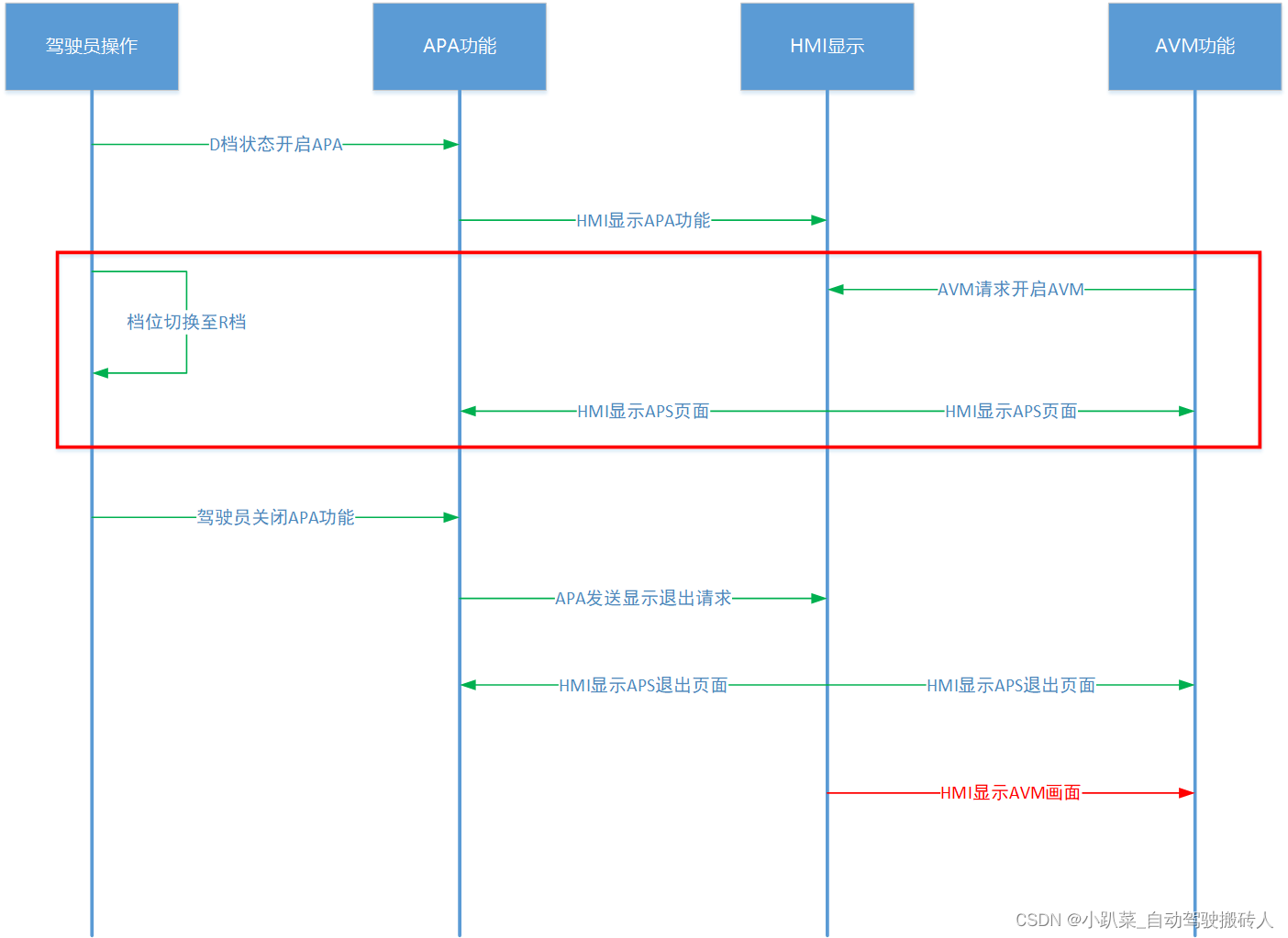
从这里我们可以看到,其实出问题的地方在于红色方框内。此时对于HMI来讲,它收到了两个不同的显示请求。通常来讲,APA的功能优先级会高于AVM功能(注:APA功能页面下也可以观察车辆周围环境),所以HMI会选择不响应AVM侧的请求。如果在软件实现层面来讲,对于请求的处理为变化沿策略的话,此时必然会出现在APA功能退出后,无法进入AVM页面。这里其实并不是设计或者实现的问题,单拎出来,需求和实现都没有问题。针对上述问题,我个人认为的解决方案有两个:
1. 显示请求持续发送,HMI持续关注显示请求。在显示屏幕空闲后,关注最终接收的请求。
2. 显示请求不持续发送,HMI对请求进行记忆。在显示屏幕空闲后,显示最先记忆的请求。
上述方案来讲,我的理解都存在一定的缺陷。对于方案1,在APA功能退出的过程中驾驶员再次切换档位至D当时,按照方案1的设计,最终HMI画面显示会是D档的视图,而非R档的视图。对于方案2,在APA功能退出的过程中驾驶员再次切换档位至D当时,按照方案1的设计,最终HMI画面显示会是R档的视图,而非D档的视图。在分析的过程中,我衍生出了一个新的解决方案,先显示R档视图,显示一段时间后切换至D档视图。针对于上述的方案,我个人认为都会有不同的见解。比如说:方案1 的问题点在于忽略了R档的显示请求,客户可能会抱怨为什么R档不响应AVM;对于方案2来讲,客户可能抱怨我处于D档却显示R档的的视图;对于衍生方案来讲,客户可能抱怨我明明在D档下什么都没有操作,视图为什么切换。我不是抛出一个问题,这里我是想引申出一个问题:功能设计可能不完美,但是不代表功能不能够使用。 工程设计追求的不是完美的设计,这或许不存在,工程设计追求的应当是最优解。
上述的解决方案来讲,均可以解决APA功能退出后,无法响应档位激活AVM请求。对于OEM来讲,终端用户的使用不受制定的规则约束。如果不满足他的期望,他就可能产生不良的市场反馈。本着推动解决此问题的初衷,可能需要OEM基于前期的市场调研和常规的驾驶操作综合考虑最终的解决方案了。
问题2 —— 使用场景局限
身为自动驾驶领域的从业人员来讲,在说明使用场景局限的问题前,我想先引入一个术语 —— ODD( Operational Design Domain)。这相当于功能运行的前提条件或者说是在ODD之内能保障功能正常运行。这部分内容常见于每个车型自带的用户手册上,例如下图是阿维塔11在官网上的用户手册上的说明文字。
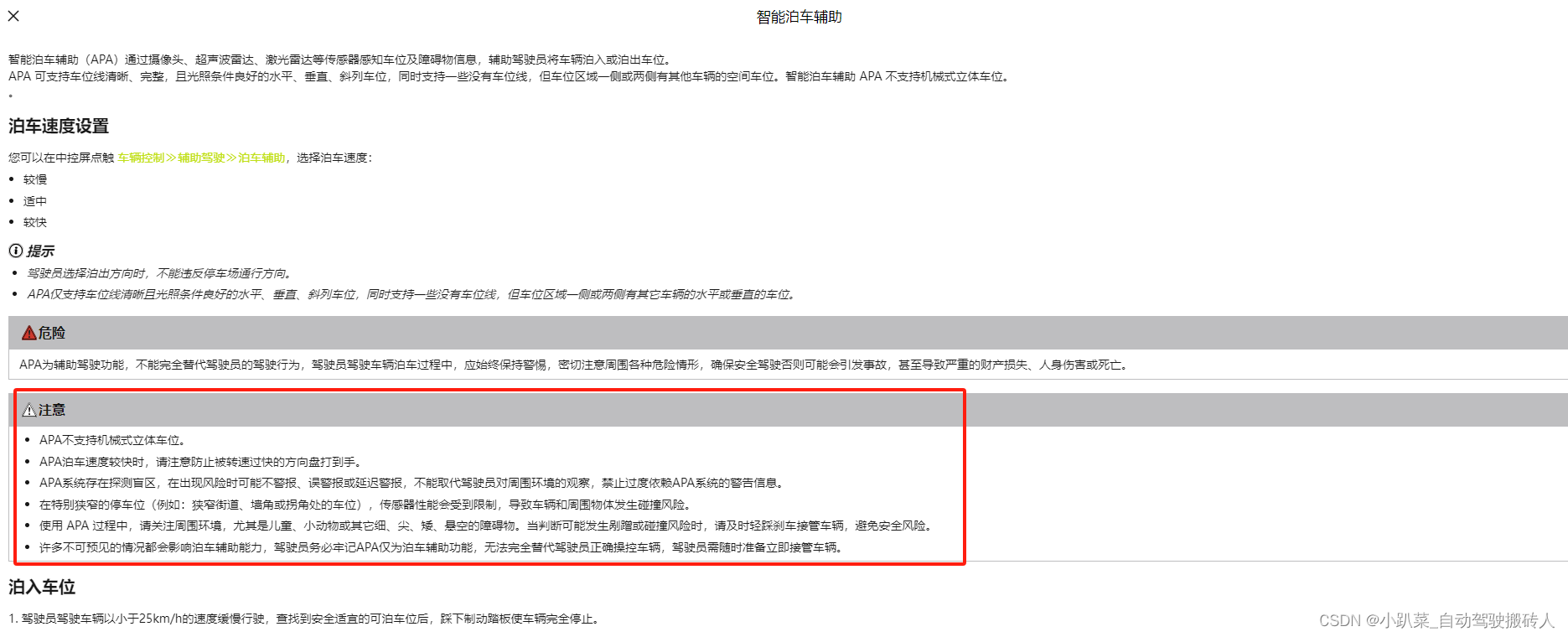
从OEM角度出发,这块相当于自己对系统功能局限情况的声明,但是实际的情况中,可能跟实际使用过程中存在差异。OEM无法要求用户在何种场景、何种条件使用功能,所以实际环境千变万化,无法详尽。针对现在的自动驾驶方案 —— 既有规则主导,从工程的角度来讲,ODD只能完善,无法完尽。按照我的理解,端对端的自动驾驶方案会有一定的改善。


















 1873
1873

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











