




 本文详细介绍了ROS中package.xml的作用与写法,包括包名、版本、描述、维护者、许可、构建工具、依赖等内容,帮助读者快速理解并使用package.xml。
本文详细介绍了ROS中package.xml的作用与写法,包括包名、版本、描述、维护者、许可、构建工具、依赖等内容,帮助读者快速理解并使用package.xml。
package.xml作用
pacakge.xml 包含了package的名称、版本号、内容描述、维护人员、软件许可、编译构建工具、编译依赖、运行依赖等信息。
实际上 rospack find 、 rosdep 等命令之所以能快速定位和分析出package的依赖项信息,就是直接读取了每一个pacakge中的 package.xml 文件。它为用户提供了快速了解一个pacakge的渠道。
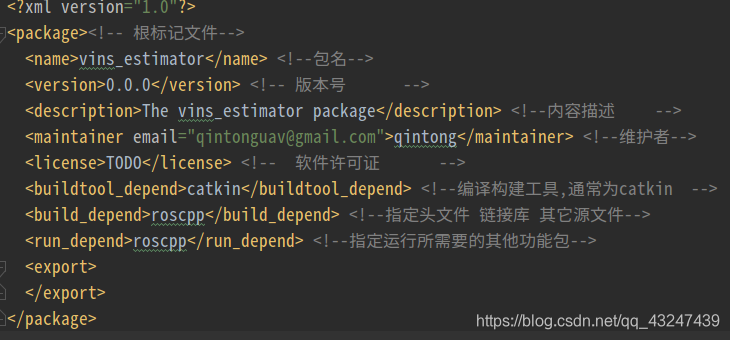
package.xml写法(来自VINS-mono中 vins_estimator)
pacakge.xml 遵循xml标签文本的写法,由于版本更迭原因,现在有两种格式并存(format1与format2),不过区别不大。
参考:机器人操作系统ROS讲义.pdf

















 602
602

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









