







 超级会员免费看
超级会员免费看
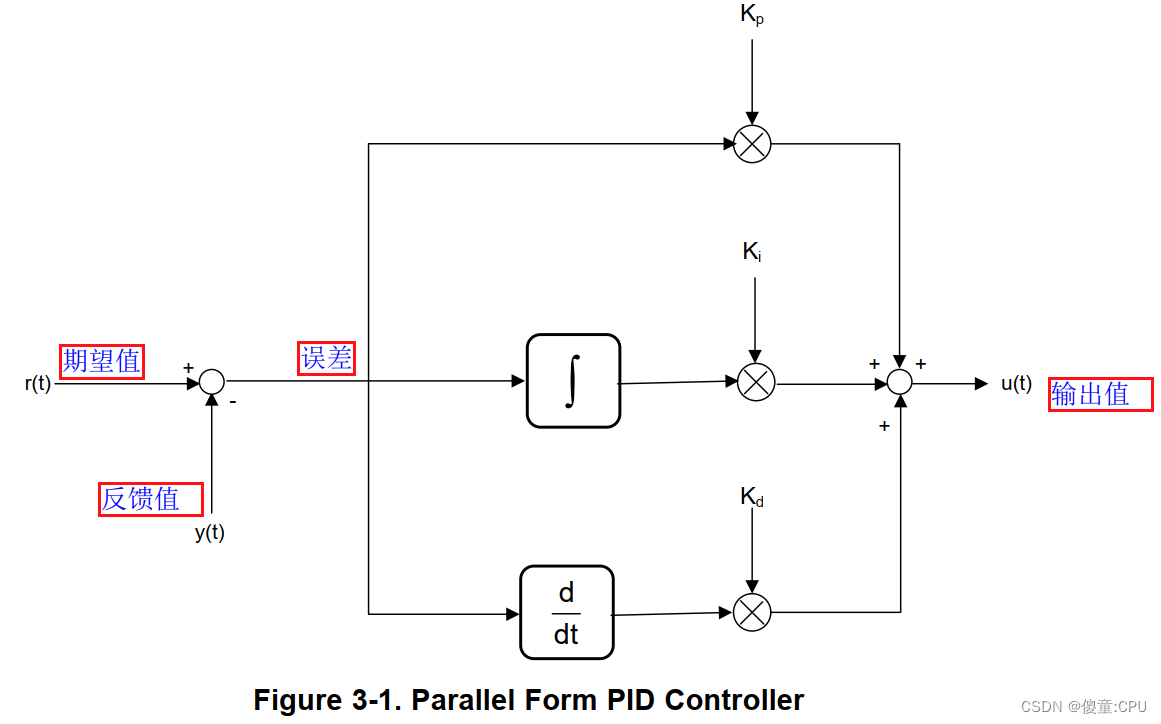
线性PID控制器
PID 控制器输出是分别作用于误差、误差积分和误差导数的三条路径的并行和。每条路径的相对权重由用户调整,以优化暂态响应。
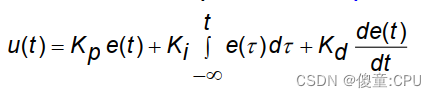
输出表达式
控制器包括三个并联连接的独立路径。
比例。上路径包含一个可调增益项(Kp),其作用是固定控制系统的开环增益。由于回路增益与这一项成正比,故 Kp 称为比例增益。
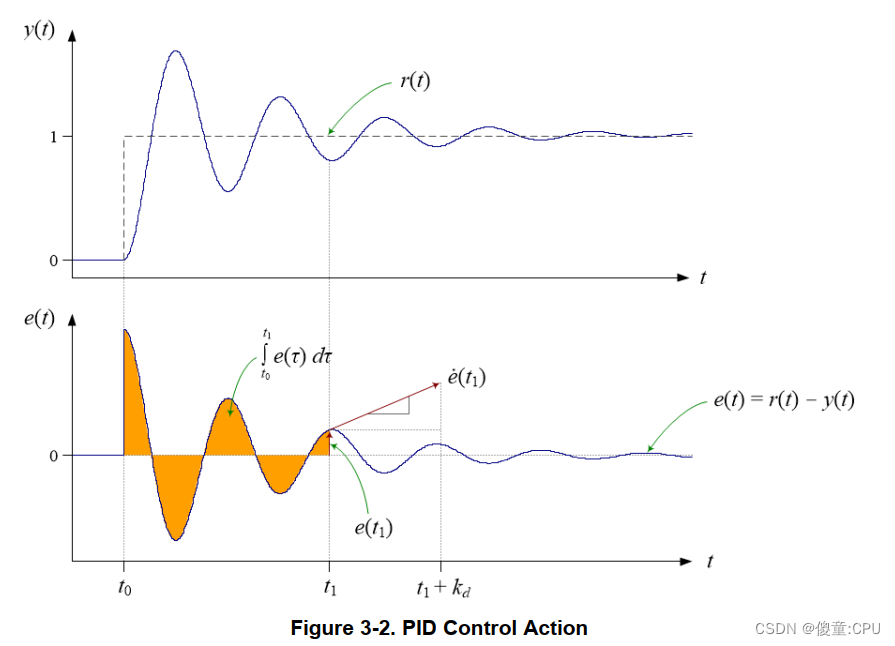
积分器。积分路径的主要作用是消除稳态误差。积分增益项的作用是改变这种情况发生的速率。
微分器。每当误差的变化率很大时,这条路径的输出就很大。导数作用的主要作用是抑制振荡和减少瞬态。
实 现
DCL中的线性 PID 控制器包括以下特 点:
•并联和理想形式
•可编程输出饱和
•比例路径上的独 立 参 考 权 重
•反上发条积分器复位
•可编程低 通 导 数滤 波 器
•外部饱和输入的积分器 抗绕 组
•输出饱和可调
库中所有的 PID 类型控制器都以类似的方式实现反清零。在控制器输出端有一个钳位,允许用户设置控制工作量的上限和下限。如果超过任何一个限制,则内部浮点控制器变量从 1.0f 变为 0.0f。这个变量乘以积分器输入,这样积分器在输出

 订阅专栏 解锁全文
订阅专栏 解锁全文

















 4047
4047











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











