










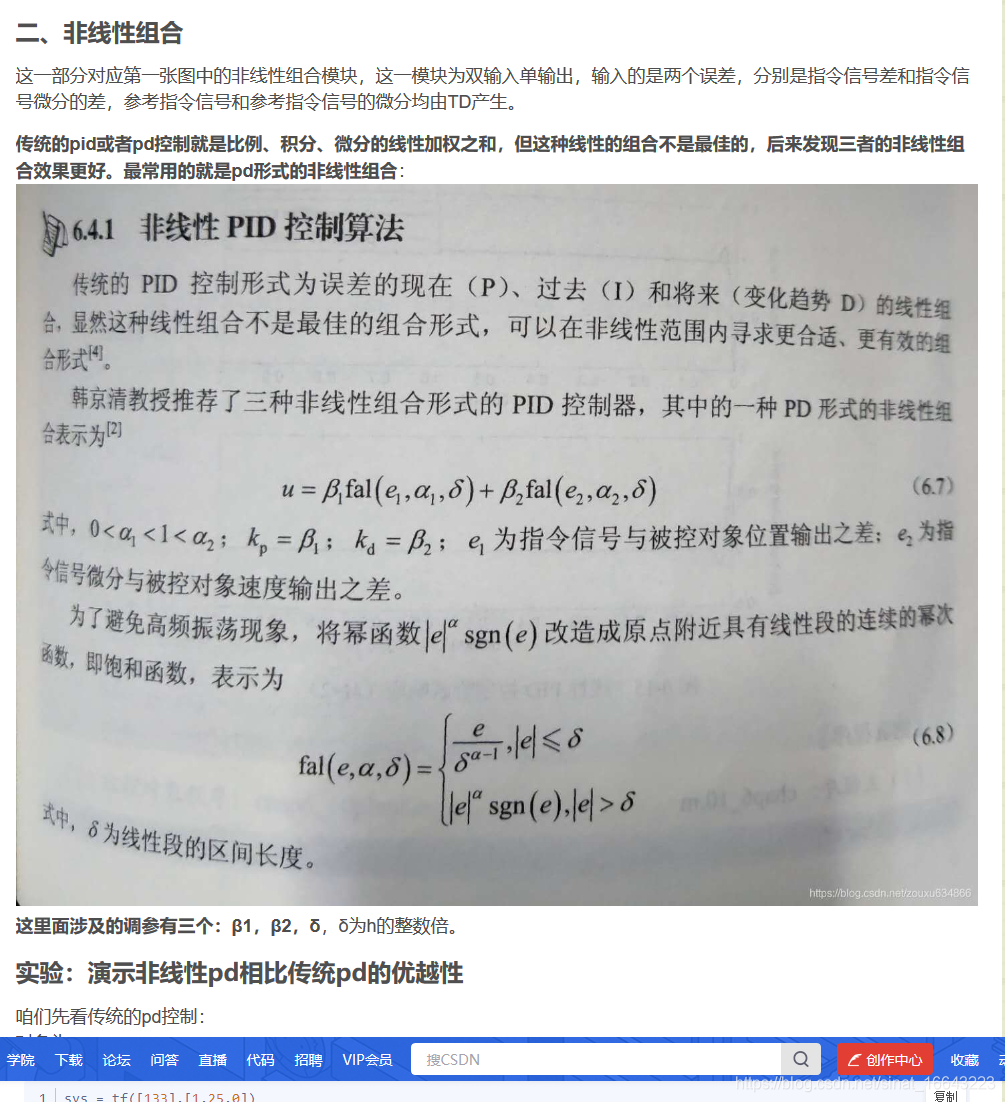
最开始是ADRC里面这么说,ADRC的一项工作就是把PID非线性化了嘛,了解了其他控制理论之后再回看PID能对PID把握得更清楚,认识到它的局限性。
https://blog.csdn.net/sinat_16643223/article/details/107857559
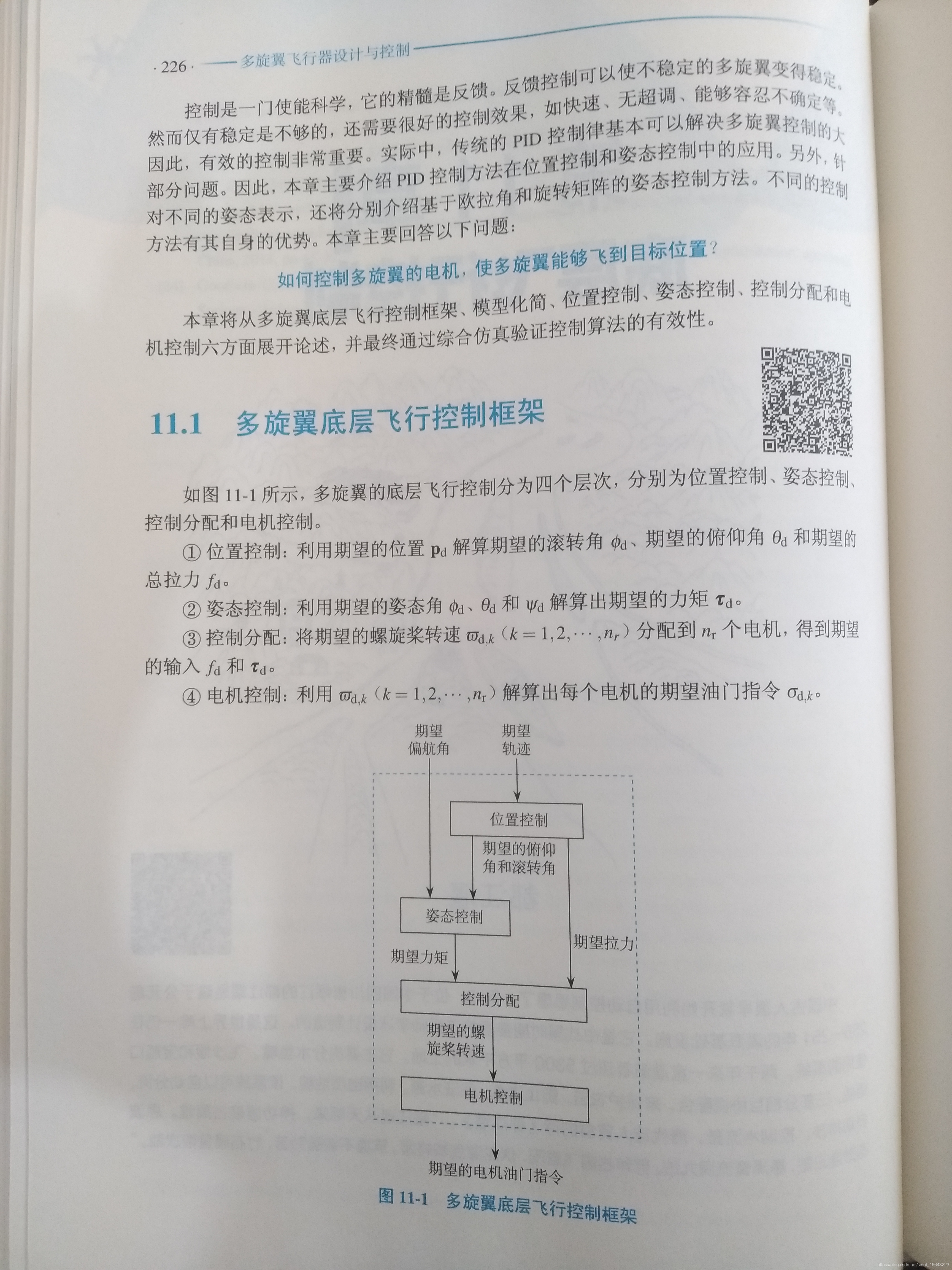
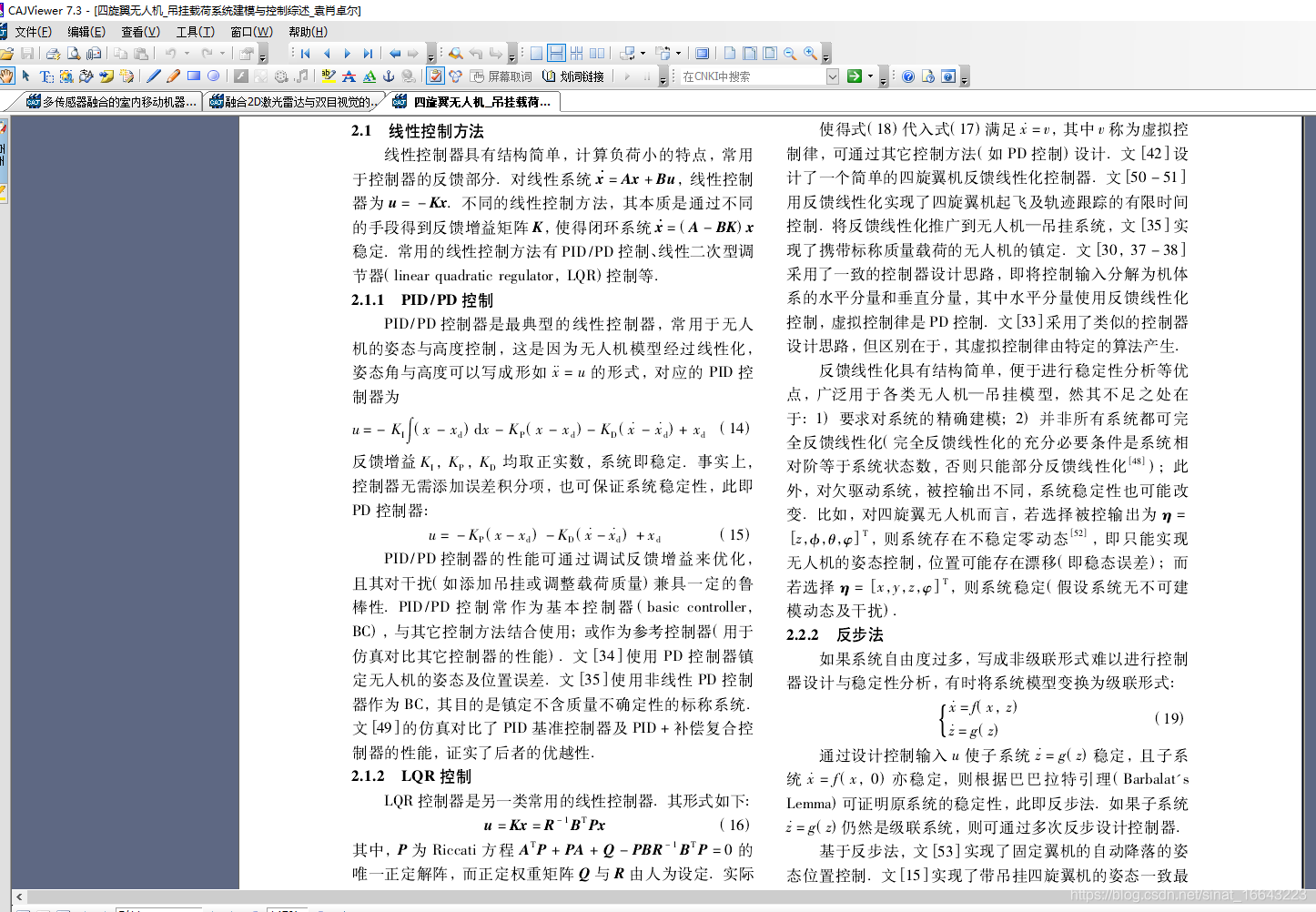
无人机是个非线性系统,只是小角度近似为线性,这个我之前在全权的《多旋翼飞行器设计与控制》里面看到过。
这篇论文里面也说了,
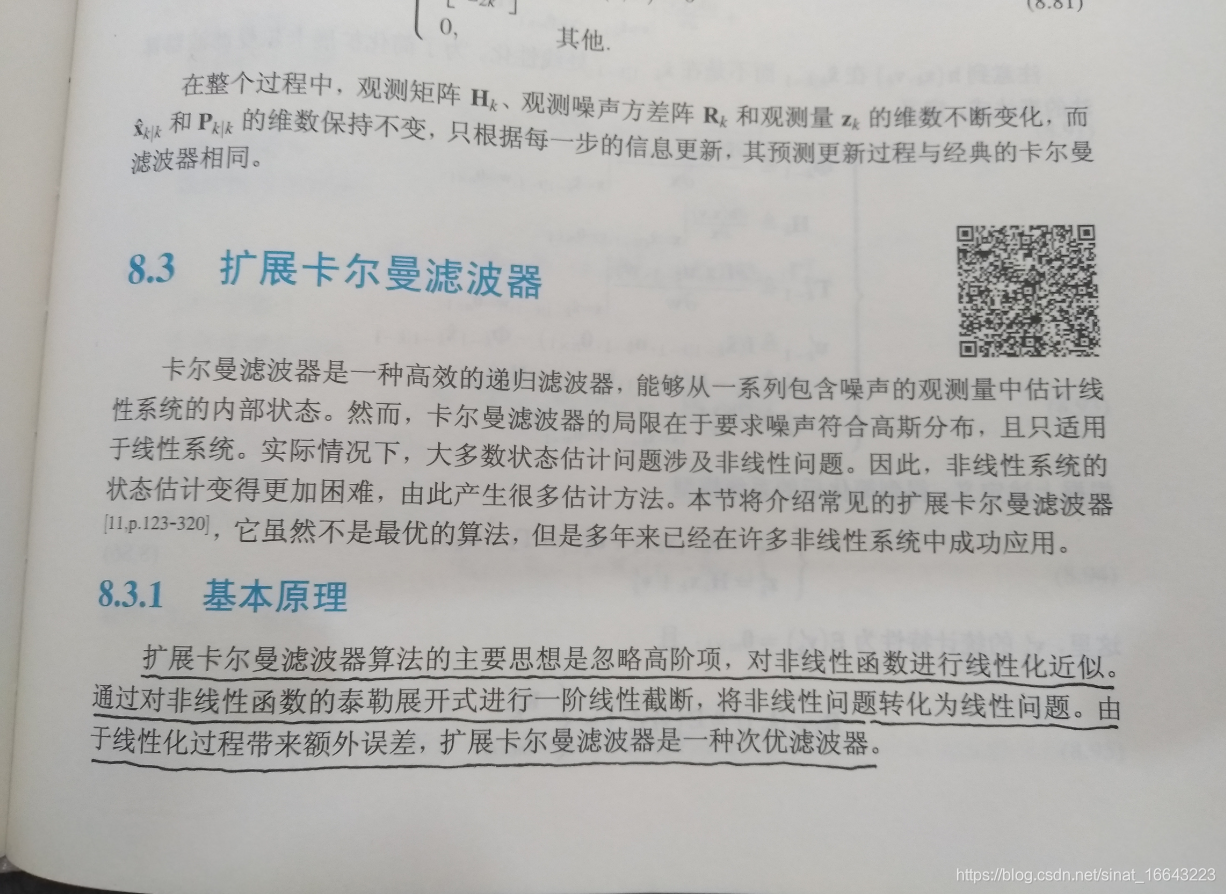
这让我想起卡尔曼滤波和扩展卡尔曼滤波。
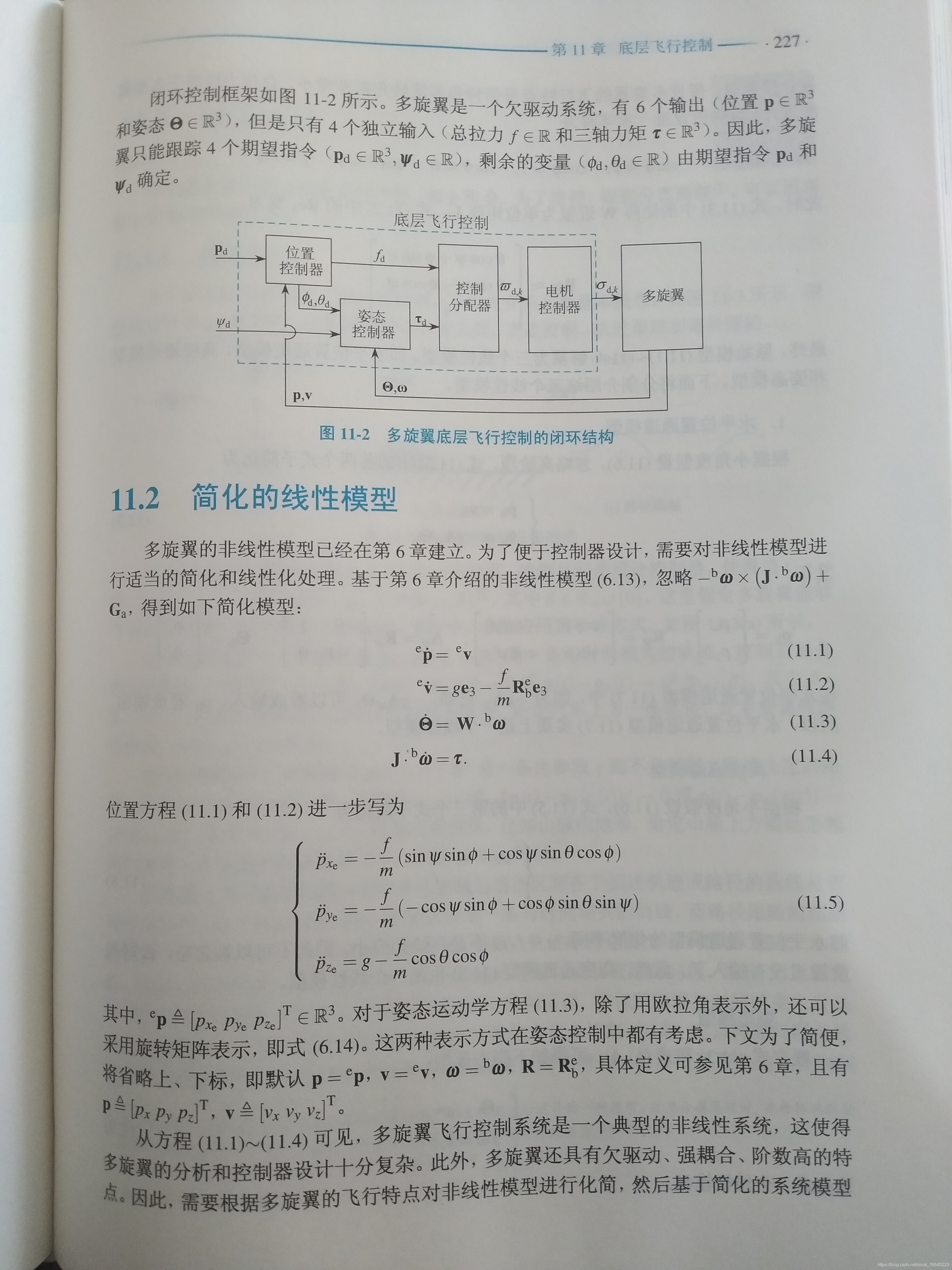
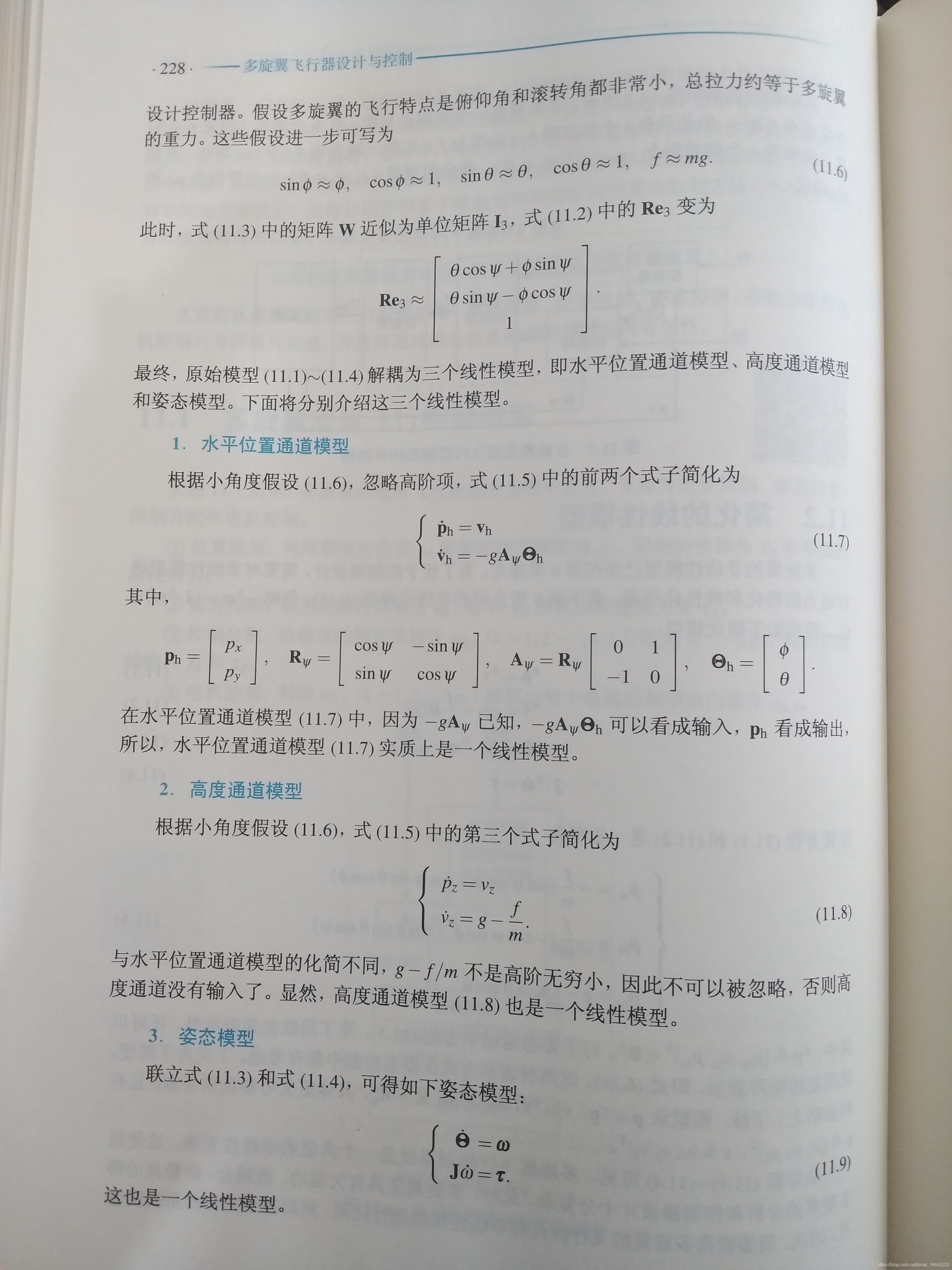
这也是拍自全权的《多旋翼飞行器设计与控制》
这里也说到了线性化处理
https://v.youku.com/v_show/id_XMzMyOTMwNTMwOA==.html?spm=a2hzp.8253869.0.0



















 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











