






 本文记录了在ROS中学习TF坐标系过程中遇到的错误及其解决方案,包括创建功能包时的字母错误和文件夹重名问题。并概述了学习TF的过程,参照了古月的视频教程和ROS笔记,通过实践创建TF广播器、监听器和launch文件,并在ROS环境中操作小海龟节点,监听TF树,使用RVIZ进行可视化。
本文记录了在ROS中学习TF坐标系过程中遇到的错误及其解决方案,包括创建功能包时的字母错误和文件夹重名问题。并概述了学习TF的过程,参照了古月的视频教程和ROS笔记,通过实践创建TF广播器、监听器和launch文件,并在ROS环境中操作小海龟节点,监听TF树,使用RVIZ进行可视化。
一、过程中的错误
错误1:在创建 learning_tf 功能包时,输入依赖包时将 rospy 写成了 rosty ,编译时出错。
解决1:根据错误报告,将CMakelists.txt 和package.xml 中的错误字母改过来即可。
错误2:在 learning_tf 功能包下,含有重名文件夹。
解决2:询问学长后发现错误,更改文件夹名字即可。(似乎是在通过 catkin_creat_pkg 创建功能包时在Include文件夹下会生成同名文件夹,莫名其妙的只改名字就可以编译成功,且没啥使用上的问题。
二、学习过程
1、参考
参考视频资料:古月(深蓝学院)视频
参考博客:ROS笔记(10)
2、学习
1、根据参考教程完成 TF广播器、TF监听器、launch 的创建。
2、roscore 启动ROS
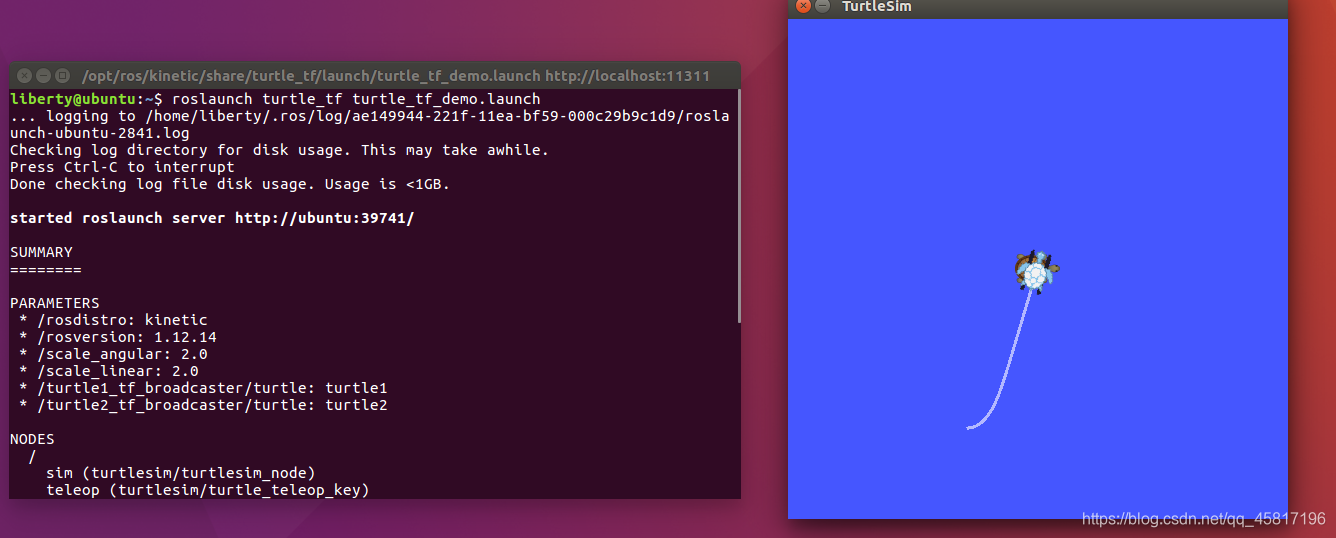
3、roslaunch turtle_tf turtle_tf_demo.launch启动两只小海龟界面,键盘在当前终端控制小海龟即可。
 4、
4、rosrun tf view_frames监听5s后查看TF树,在根目录下可见.pdf格式图片。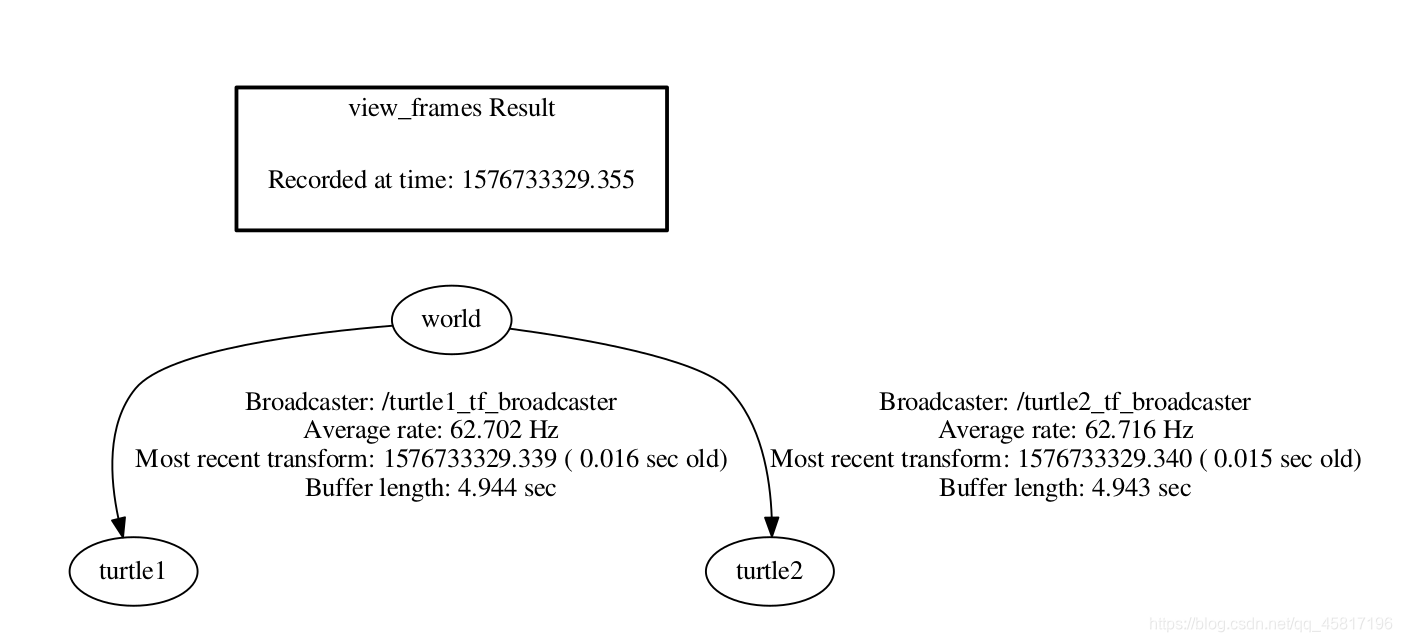
5、rosrun rviz rviz打开RVIZ,将Fixed name 改为 world,且点击Add,添加TF,即可获得如下图片。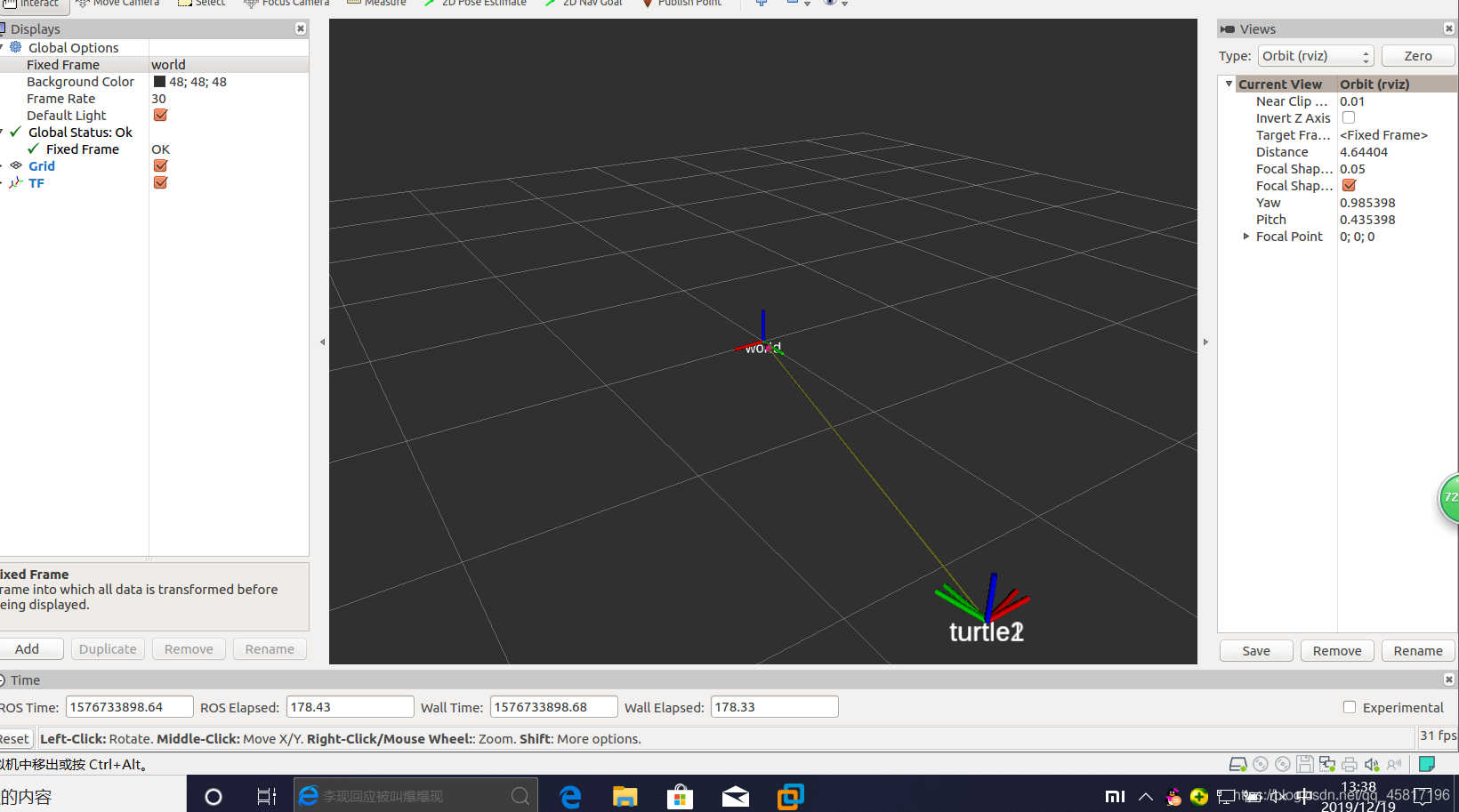

















 2129
2129

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









