







【slam十四讲第二版】【课本例题代码向】【第十二讲~建图】【实践:单目稠密重建】【RGBD-稠密建图】【从点云重建网格】【octomap的安装】【实践:八叉树地图】
0 前言
1 实践:单目稠密重建
-
本工程采用的数据集是使用REMODE的测试数据集。它提供了一架无人集采集的单目俯视图像,共有200张,同时提供了每张图像的真实位姿数据集自取:链接: https://pan.baidu.com/s/1X9Y3fo8M2mFLdHh0YoN9dA 提取码: rpow
-
整个工程出去数据集自取:链接: https://pan.baidu.com/s/19pkkGewg4lhOOE595E16WQ 提取码: bf26
1.1 dense_mapping.cpp
#include <iostream>
#include <vector>
#include <fstream>
using namespace std;
#include <boost/timer.hpp>
// for sophus
#include <sophus/se3.hpp>
using Sophus::SE3d;
// for eigen
#include <Eigen/Core>
#include <Eigen/Geometry>
using namespace Eigen;
// for opencv
#include <opencv2/core/core.hpp>
#include <opencv2/highgui/highgui.hpp>
#include <opencv2/imgproc/imgproc.hpp>
using namespace cv;
/**********************************************
* 本程序演示了单目相机在已知轨迹下的稠密深度估计
* 使用极线搜索 + NCC 匹配的方式,与书本的 12.2 节对应
* 请注意本程序并不完美,你完全可以改进它——我其实在故意暴露一些问题(这是借口)。
***********************************************/
// ------------------------------------------------------------------
// parameters
const int boarder = 20; // 边缘宽度
const int width = 640; // 图像宽度
const int height = 480; // 图像高度
const double fx = 481.2f; // 相机内参
const double fy = -480.0f;
const double cx = 319.5f;
const double cy = 239.5f;
const int ncc_window_size = 3; // NCC 取的窗口半宽度
const int ncc_area = (2 * ncc_window_size + 1) * (2 * ncc_window_size + 1); // NCC窗口面积
const double min_cov = 0.1; // 收敛判定:最小方差
const double max_cov = 10; // 发散判定:最大方差
// ------------------------------------------------------------------
// 重要的函数
/// 从 REMODE 数据集读取数据
bool readDatasetFiles(
const string &path,
vector<string> &color_image_files,
vector<SE3d> &poses,
cv::Mat &ref_depth
);
/**
* 根据新的图像更新深度估计
* @param ref 参考图像
* @param curr 当前图像
* @param T_C_R 参考图像到当前图像的位姿
* @param depth 深度
* @param depth_cov 深度方差
* @return 是否成功
*/
bool update(
const Mat &ref,
const Mat &curr,
const SE3d &T_C_R,
Mat &depth,
Mat &depth_cov2
);
/**
* 极线搜索
* @param ref 参考图像
* @param curr 当前图像
* @param T_C_R 位姿
* @param pt_ref 参考图像中点的位置
* @param depth_mu 深度均值
* @param depth_cov 深度方差
* @param pt_curr 当前点
* @param epipolar_direction 极线方向
* @return 是否成功
*/
bool epipolarSearch(
const Mat &ref,
const Mat &curr,
const SE3d &T_C_R,
const Vector2d &pt_ref,
const double &depth_mu,
const double &depth_cov,
Vector2d &pt_curr,
Vector2d &epipolar_direction
);
/**
* 更新深度滤波器
* @param pt_ref 参考图像点
* @param pt_curr 当前图像点
* @param T_C_R 位姿
* @param epipolar_direction 极线方向
* @param depth 深度均值
* @param depth_cov2 深度方向
* @return 是否成功
*/
bool updateDepthFilter(
const Vector2d &pt_ref,
const Vector2d &pt_curr,
const SE3d &T_C_R,
const Vector2d &epipolar_direction,
Mat &depth,
Mat &depth_cov2
);
/**
* 计算 NCC 评分
* @param ref 参考图像
* @param curr 当前图像
* @param pt_ref 参考点
* @param pt_curr 当前点
* @return NCC评分
*/
double NCC(const Mat &ref, const Mat &curr, const Vector2d &pt_ref, const Vector2d &pt_curr);
// 双线性灰度插值
inline double getBilinearInterpolatedValue(const Mat &img, const Vector2d &pt) {
uchar *d = &img.data[int(pt(1, 0)) * img.step + int(pt(0, 0))];//读取
double xx = pt(0, 0) - floor(pt(0, 0));
double yy = pt(1, 0) - floor(pt(1, 0));
return ((1 - xx) * (1 - yy) * double(d[0]) +
xx * (1 - yy) * double(d[1]) +
(1 - xx) * yy * double(d[img.step]) +
xx * yy * double(d[img.step + 1])) / 255.0;
}
// ------------------------------------------------------------------
// 一些小工具
// 显示估计的深度图
void plotDepth(const Mat &depth_truth, const Mat &depth_estimate);
// 像素到相机坐标系
inline Vector3d px2cam(const Vector2d px) {
return Vector3d(
(px(0, 0) - cx) / fx,
(px(1, 0) - cy) / fy,
1
);
}
// 相机坐标系到像素
inline Vector2d cam2px(const Vector3d p_cam) {
return Vector2d(
p_cam(0, 0) * fx / p_cam(2, 0) + cx,
p_cam(1, 0) * fy / p_cam(2, 0) + cy
);
}
// 检测一个点是否在图像边框内
inline bool inside(const Vector2d &pt) {
return pt(0, 0) >= boarder && pt(1, 0) >= boarder
&& pt(0, 0) + boarder < width && pt(1, 0) + boarder <= height;
}
// 显示极线匹配
void showEpipolarMatch(const Mat &ref, const Mat &curr, const Vector2d &px_ref, const Vector2d &px_curr);
// 显示极线
/**
*
* @param ref 参考图像
* @param curr 当前图像
* @param px_ref 参考图像的坐标点
* @param px_min_curr 按最小深度投影的像素
* @param px_max_curr 按最大深度投影的像素
*/
void showEpipolarLine(const Mat &ref, const Mat &curr, const Vector2d &px_ref, const Vector2d &px_min_curr,
const Vector2d &px_max_curr);
/// 评测深度估计
void evaludateDepth(const Mat &depth_truth, const Mat &depth_estimate);
// ------------------------------------------------------------------
int main(int argc, char **argv) {
if (argc != 2) {
cout << "Usage: dense_mapping path_to_test_dataset" << endl;
return -1;
}
// 从数据集读取数据
vector<string> color_image_files;
vector<SE3d> poses_TWC;
Mat ref_depth;
bool ret = readDatasetFiles(argv[1], color_image_files, poses_TWC, ref_depth);
if (ret == false) {
cout << "Reading image files failed!" << endl;
return -1;
}
cout << "read total " << color_image_files.size() << " files." << endl;
// 第一张图
Mat ref = imread(color_image_files[0], 0); // gray-scale image
SE3d pose_ref_TWC = poses_TWC[0];
double init_depth = 3.0; // 深度初始值
double init_cov2 = 3.0; // 方差初始值
Mat depth(height, width, CV_64F, init_depth); // 深度图
Mat depth_cov2(height, width, CV_64F, init_cov2); // 深度图方差
for (int index = 1; index < color_image_files.size(); index++) {
cout << "*** loop " << index << " ***" << endl;
Mat curr = imread(color_image_files[index], 0);
if (curr.data == nullptr) continue;
SE3d pose_curr_TWC = poses_TWC[index];
SE3d pose_T_C_R = pose_curr_TWC.inverse() * pose_ref_TWC; // 坐标转换关系: T_C_W * T_W_R = T_C_R
update(ref, curr, pose_T_C_R, depth, depth_cov2);
evaludateDepth(ref_depth, depth);
plotDepth(ref_depth, depth);
imshow("image", curr);
waitKey(1);
}
cout << "estimation returns, saving depth map ..." << endl;
imwrite("depth.png", depth);
cout << "done." << endl;
return 0;
}
bool readDatasetFiles(
const string &path,
vector<string> &color_image_files,
std::vector<SE3d> &poses,
cv::Mat &ref_depth) {
ifstream fin(path + "/first_200_frames_traj_over_table_input_sequence.txt");
if (!fin) return false;
while (!fin.eof()) {
// 数据格式:图像文件名 tx, ty, tz, qx, qy, qz, qw ,注意是 TWC 而非 TCW
string image;
fin >> image;
double data[7];
for (double &d:data) fin >> d;
color_image_files.push_back(path + string("/images/") + image);
poses.push_back(
SE3d(Quaterniond(data[6], data[3], data[4], data[5]),
Vector3d(data[0], data[1], data[2]))
);
if (!fin.good()) break;
}
fin.close();
// load reference depth
fin.open(path + "/depthmaps/scene_000.depth");
ref_depth = cv::Mat(height, width, CV_64F);
if (!fin) return false;
for (int y = 0; y < height; y++)
for (int x = 0; x < width; x++) {
double depth = 0;
fin >> depth;
ref_depth.ptr<double>(y)[x] = depth / 100.0;
}
return true;
}
// 对整个深度图进行更新
bool update(const Mat &ref, const Mat &curr, const SE3d &T_C_R, Mat &depth, Mat &depth_cov2) {
for (int x = boarder; x < width - boarder; x++)
for (int y = boarder; y < height - boarder; y++) {
// 遍历每个像素
if (depth_cov2.ptr<double>(y)[x] < min_cov || depth_cov2.ptr<double>(y)[x] > max_cov) // 深度已收敛或发散
continue;
// 在极线上搜索 (x,y) 的匹配
Vector2d pt_curr;
Vector2d epipolar_direction;
bool ret = epipolarSearch(
ref,
curr,
T_C_R,
Vector2d(x, y),
depth.ptr<double>(y)[x],
sqrt(depth_cov2.ptr<double>(y)[x]),
pt_curr,
epipolar_direction
);
if (ret == false) // 匹配失败
continue;
// 取消该注释以显示匹配
// showEpipolarMatch(ref, curr, Vector2d(x, y), pt_curr);
// 匹配成功,更新深度图
updateDepthFilter(Vector2d(x, y), pt_curr, T_C_R, epipolar_direction, depth, depth_cov2);
}
}
// 极线搜索
/**
* 极线搜索
* @param ref 参考图像
* @param curr 当前图像
* @param T_C_R ref图像与curr图像的相对位姿
* @param pt_ref 参考图像中点的位置
* @param depth_mu 深度均值
* @param depth_cov 深度方差
* @param pt_curr 当前点
* @param epipolar_direction 极线方向
* @return 是否成功
*/
// 方法见书 12.2 12.3 两节
bool epipolarSearch(
const Mat &ref, const Mat &curr,
const SE3d &T_C_R, const Vector2d &pt_ref,
const double &depth_mu, const double &depth_cov,
Vector2d &pt_curr, Vector2d &epipolar_direction) {
Vector3d f_ref = px2cam(pt_ref); //将参考点的像素点坐标转变为归一化平面上的坐标
f_ref.normalize();//确保是齐次坐标
Vector3d P_ref = f_ref * depth_mu; // 参考帧的 P 向量:转变为相机坐标系下的三维坐标;P_R_p
Vector2d px_mean_curr = cam2px(T_C_R * P_ref); // 按深度均值投影的像素,括号内得到P_C_p;再将该相机坐标系下三维坐标转变为像素坐标,得到对应当前图像下的像素坐标点
double d_min = depth_mu - 3 * depth_cov, d_max = depth_mu + 3 * depth_cov;//按照3个不确定度来确定深度的最小值和最大值
if (d_min < 0.1) d_min = 0.1;
Vector2d px_min_curr = cam2px(T_C_R * (f_ref * d_min)); // 按最小深度投影的像素
Vector2d px_max_curr = cam2px(T_C_R * (f_ref * d_max)); // 按最大深度投影的像素
Vector2d epipolar_line = px_max_curr - px_min_curr; // 极线(线段形式)
epipolar_direction = epipolar_line; // 极线方向
epipolar_direction.normalize();
double half_length = 0.5 * epipolar_line.norm(); // 极线线段的半长度
if (half_length > 100) half_length = 100; // 我们不希望搜索太多东西
// 取消此句注释以显示极线(线段)
//showEpipolarLine( ref, curr, pt_ref, px_min_curr, px_max_curr );
// 在极线上搜索,以深度均值点为中心,左右各取半长度
double best_ncc = -1.0;
Vector2d best_px_curr;
for (double l = -half_length; l <= half_length; l += 0.7) { // l+=sqrt(2)
Vector2d px_curr = px_mean_curr + l * epipolar_direction; // 待匹配点
if (!inside(px_curr))//检测一个点是否在图像边框内,如果不在,就跳过这点
continue;
// 计算待匹配点与参考帧的 NCC(归一化互相关度)
double ncc = NCC(ref, curr, pt_ref, px_curr);//选择ncc的方式计算块匹配评分
if (ncc > best_ncc) {
best_ncc = ncc;
best_px_curr = px_curr;
}
}
if (best_ncc < 0.85f) // 只相信 NCC 很高的匹配
return false;
pt_curr = best_px_curr;
return true;
}
/**
* 计算 NCC 评分
* @param ref 参考图像
* @param curr 当前图像
* @param pt_ref 参考点
* @param pt_curr 当前点
* @return NCC评分
*/
double NCC(
const Mat &ref, const Mat &curr,
const Vector2d &pt_ref, const Vector2d &pt_curr) {
// 零均值-归一化互相关
// 先算均值
double mean_ref = 0, mean_curr = 0;
vector<double> values_ref, values_curr; // 参考帧和当前帧的均值
for (int x = -ncc_window_size; x <= ncc_window_size; x++)
for (int y = -ncc_window_size; y <= ncc_window_size; y++) {
double value_ref = double(ref.ptr<uchar>(int(y + pt_ref(1, 0)))[int(x + pt_ref(0, 0))]) / 255.0;
mean_ref += value_ref;
double value_curr = getBilinearInterpolatedValue(curr, pt_curr + Vector2d(x, y));
mean_curr += value_curr;
values_ref.push_back(value_ref);
values_curr.push_back(value_curr);
}
mean_ref /= ncc_area;
mean_curr /= ncc_area;
// 计算 Zero mean NCC
double numerator = 0, demoniator1 = 0, demoniator2 = 0;
for (int i = 0; i < values_ref.size(); i++) {
double n = (values_ref[i] - mean_ref) * (values_curr[i] - mean_curr);
numerator += n;
demoniator1 += (values_ref[i] - mean_ref) * (values_ref[i] - mean_ref);
demoniator2 += (values_curr[i] - mean_curr) * (values_curr[i] - mean_curr);
}
return numerator / sqrt(demoniator1 * demoniator2 + 1e-10); // 防止分母出现零
}
/**
* 更新深度滤波器
* @param pt_ref 参考图像点
* @param pt_curr 当前图像点
* @param T_C_R 位姿
* @param epipolar_direction 极线方向
* @param depth 深度均值
* @param depth_cov2 深度方向
* @return 是否成功
*/
bool updateDepthFilter( //主要是12.2.3的知识
const Vector2d &pt_ref,
const Vector2d &pt_curr,
const SE3d &T_C_R,
const Vector2d &epipolar_direction,
Mat &depth,
Mat &depth_cov2) {
// 用三角化计算深度
SE3d T_R_C = T_C_R.inverse();
Vector3d f_ref = px2cam(pt_ref);//像素到相机坐标系转变的齐次坐标
f_ref.normalize();
Vector3d f_curr = px2cam(pt_curr);//像素到相机坐标系转变的齐次坐标
f_curr.normalize();
// 方程
// d_ref * f_ref = d_cur * ( R_RC * f_cur ) + t_RC
// f2 = R_RC * f_cur
// 转化成下面这个矩阵方程组
// => [ f_ref^T f_ref, -f_ref^T f2 ] [d_ref] [f_ref^T t]
// [ f2^T f_ref, -f2^T f2 ] [d_cur] = [f2^T t ]
Vector3d t = T_R_C.translation();
Vector3d f2 = T_R_C.so3() * f_curr;
Vector2d b = Vector2d(t.dot(f_ref), t.dot(f2));
Matrix2d A;
A(0, 0) = f_ref.dot(f_ref);
A(0, 1) = -f_ref.dot(f2);
A(1, 0) = -A(0, 1);
A(1, 1) = -f2.dot(f2);
Vector2d ans = A.inverse() * b;
Vector3d xm = ans[0] * f_ref; // ref 侧的结果
Vector3d xn = t + ans[1] * f2; // cur 结果
Vector3d p_esti = (xm + xn) / 2.0; // P的位置,取两者的平均
double depth_estimation = p_esti.norm(); // 深度值
// 计算不确定性(以一个像素为误差)
Vector3d p = f_ref * depth_estimation;
Vector3d a = p - t;
double t_norm = t.norm();
double a_norm = a.norm();
double alpha = acos(f_ref.dot(t) / t_norm);
double beta = acos(-a.dot(t) / (a_norm * t_norm));
Vector3d f_curr_prime = px2cam(pt_curr + epipolar_direction);
f_curr_prime.normalize();
double beta_prime = acos(f_curr_prime.dot(-t) / t_norm);
double gamma = M_PI - alpha - beta_prime;
double p_prime = t_norm * sin(beta_prime) / sin(gamma);
double d_cov = p_prime - depth_estimation;
double d_cov2 = d_cov * d_cov;
// 高斯融合
double mu = depth.ptr<double>(int(pt_ref(1, 0)))[int(pt_ref(0, 0))];
double sigma2 = depth_cov2.ptr<double>(int(pt_ref(1, 0)))[int(pt_ref(0, 0))];
double mu_fuse = (d_cov2 * mu + sigma2 * depth_estimation) / (sigma2 + d_cov2);
double sigma_fuse2 = (sigma2 * d_cov2) / (sigma2 + d_cov2);
depth.ptr<double>(int(pt_ref(1, 0)))[int(pt_ref(0, 0))] = mu_fuse;
depth_cov2.ptr<double>(int(pt_ref(1, 0)))[int(pt_ref(0, 0))] = sigma_fuse2;
return true;
}
// 后面这些太简单我就不注释了(其实是因为懒)
void plotDepth(const Mat &depth_truth, const Mat &depth_estimate) {
imshow("depth_truth", depth_truth * 0.4);
imshow("depth_estimate", depth_estimate * 0.4);
imshow("depth_error", depth_truth - depth_estimate);
waitKey(1);
}
/// 评测深度估计
void evaludateDepth(const Mat &depth_truth, const Mat &depth_estimate) {
double ave_depth_error = 0; // 平均误差
double ave_depth_error_sq = 0; // 平方误差
int cnt_depth_data = 0;
for (int y = boarder; y < depth_truth.rows - boarder; y++)
for (int x = boarder; x < depth_truth.cols - boarder; x++) {
double error = depth_truth.ptr<double>(y)[x] - depth_estimate.ptr<double>(y)[x];
ave_depth_error += error;
ave_depth_error_sq += error * error;
cnt_depth_data++;
}
ave_depth_error /= cnt_depth_data;
ave_depth_error_sq /= cnt_depth_data;
cout << "Average squared error = " << ave_depth_error_sq << ", average error: " << ave_depth_error << endl;
}
void showEpipolarMatch(const Mat &ref, const Mat &curr, const Vector2d &px_ref, const Vector2d &px_curr) {
Mat ref_show, curr_show;
cv::cvtColor(ref, ref_show, CV_GRAY2BGR);
cv::cvtColor(curr, curr_show, CV_GRAY2BGR);
cv::circle(ref_show, cv::Point2f(px_ref(0, 0), px_ref(1, 0)), 5, cv::Scalar(0, 0, 250), 2);
cv::circle(curr_show, cv::Point2f(px_curr(0, 0), px_curr(1, 0)), 5, cv::Scalar(0, 0, 250), 2);
imshow("ref", ref_show);
imshow("curr", curr_show);
waitKey(1);
}
// 显示极线
/**
*
* @param ref 参考图像
* @param curr 当前图像
* @param px_ref 参考图像的坐标点
* @param px_min_curr 按最小深度投影的像素
* @param px_max_curr 按最大深度投影的像素
*/
void showEpipolarLine(const Mat &ref, const Mat &curr, const Vector2d &px_ref, const Vector2d &px_min_curr,
const Vector2d &px_max_curr) {
Mat ref_show, curr_show;
cv::cvtColor(ref, ref_show, CV_GRAY2BGR);//表示将当前灰度图像转变为RGB图像
cv::cvtColor(curr, curr_show, CV_GRAY2BGR);
cv::circle(ref_show, cv::Point2f(px_ref(0, 0), px_ref(1, 0)), 5, cv::Scalar(0, 255, 0), 2);
cv::circle(curr_show, cv::Point2f(px_min_curr(0, 0), px_min_curr(1, 0)), 5, cv::Scalar(0, 255, 0), 2);
cv::circle(curr_show, cv::Point2f(px_max_curr(0, 0), px_max_curr(1, 0)), 5, cv::Scalar(0, 255, 0), 2);
cv::line(curr_show, Point2f(px_min_curr(0, 0), px_min_curr(1, 0)), Point2f(px_max_curr(0, 0), px_max_curr(1, 0)),
Scalar(0, 255, 0), 1);
imshow("ref1", ref_show);
imshow("curr", curr_show);
waitKey(1);
}
1.2 CMakeLists.txt
cmake_minimum_required(VERSION 2.8)
project(dense_monocular)
set(CMAKE_BUILD_TYPE "Release")
set(CMAKE_CXX_STANDARD 14)
############### dependencies ######################
# Eigen
include_directories("/usr/include/eigen3")
# OpenCV
find_package(OpenCV 3.1 REQUIRED)
include_directories(${OpenCV_INCLUDE_DIRS})
# Sophus
find_package(Sophus REQUIRED)
include_directories(${Sophus_INCLUDE_DIRS})
set(THIRD_PARTY_LIBS
${OpenCV_LIBS}
${Sophus_LIBRARIES} fmt)
add_executable(dense_mapping src/dense_mapping.cpp)
target_link_libraries(dense_mapping ${THIRD_PARTY_LIBS})
1.3 输出
- 运行可执行文件
./dense_mapping ../../remode_test_data/test_data
- 输出图片
- 这里就不给予演示
- 这里我是想把深度图和灰度图一起合成一个3d点云图输出,但是没有成功,也不知道为什么,以后有机会再来探讨
2. RGBD-稠密建图
- 工程所需要的
data数据,可自取:链接: https://pan.baidu.com/s/1ADHiAneTXvNkmc0AgfZECA 提取码: mgr0 - 这个代码工程不包含数据集的,自取:链接: https://pan.baidu.com/s/1IxfpG9pKZizO85PvKBG-Gg 提取码: dqnu
2.1 pointcloud_mapping.cpp
#include <iostream>
#include <fstream>
using namespace std;
#include <opencv2/core/core.hpp>
#include <opencv2/highgui/highgui.hpp>
#include <Eigen/Geometry>
#include <boost/format.hpp> // for formating strings
#include <pcl/point_types.h>
#include <pcl/io/pcd_io.h>
#include <pcl/filters/voxel_grid.h>
#include <pcl/visualization/pcl_visualizer.h>
#include <pcl/filters/statistical_outlier_removal.h>
int main(int argc, char **argv) {
vector<cv::Mat> colorImgs, depthImgs; // 彩色图和深度图
vector<Eigen::Isometry3d> poses; // 相机位姿
ifstream fin("../data/pose.txt");
if (!fin) {
cerr << "cannot find pose file" << endl;
return 1;
}
for (int i = 0; i < 5; i++) {
boost::format fmt("../data/%s/%d.%s"); //图像文件格式
colorImgs.push_back(cv::imread((fmt % "color" % (i + 1) % "png").str()));
depthImgs.push_back(cv::imread((fmt % "depth" % (i + 1) % "png").str(), -1)); // 使用-1读取原始图像
double data[7] = {0};
for (int i = 0; i < 7; i++) {
fin >> data[i];
}
Eigen::Quaterniond q(data[6], data[3], data[4], data[5]);
Eigen::Isometry3d T(q);
T.pretranslate(Eigen::Vector3d(data[0], data[1], data[2]));
poses.push_back(T);
}
// 计算点云并拼接
// 相机内参
double cx = 319.5;
double cy = 239.5;
double fx = 481.2;
double fy = -480.0;
double depthScale = 5000.0;
cout << "正在将图像转换为点云..." << endl;
// 定义点云使用的格式:这里用的是XYZRGB
typedef pcl::PointXYZRGB PointT;
typedef pcl::PointCloud<PointT> PointCloud;
// 新建一个点云
PointCloud::Ptr pointCloud(new PointCloud);
for (int i = 0; i < 5; i++) {
PointCloud::Ptr current(new PointCloud);
cout << "转换图像中: " << i + 1 << endl;
cv::Mat color = colorImgs[i];
cv::Mat depth = depthImgs[i];
Eigen::Isometry3d T = poses[i];
for (int v = 0; v < color.rows; v++)
for (int u = 0; u < color.cols; u++) {
unsigned int d = depth.ptr<unsigned short>(v)[u]; // 深度值
if (d == 0) continue; // 为0表示没有测量到
Eigen::Vector3d point;
point[2] = double(d) / depthScale;
point[0] = (u - cx) * point[2] / fx;
point[1] = (v - cy) * point[2] / fy;
Eigen::Vector3d pointWorld = T * point;
PointT p;
p.x = pointWorld[0];
p.y = pointWorld[1];
p.z = pointWorld[2];
p.b = color.data[v * color.step + u * color.channels()];
p.g = color.data[v * color.step + u * color.channels() + 1];
p.r = color.data[v * color.step + u * color.channels() + 2];
current->points.push_back(p);
}
// depth filter and statistical removal
PointCloud::Ptr tmp(new PointCloud);
pcl::StatisticalOutlierRemoval<PointT> statistical_filter;
statistical_filter.setMeanK(50);
statistical_filter.setStddevMulThresh(1.0);
statistical_filter.setInputCloud(current);
statistical_filter.filter(*tmp);
(*pointCloud) += *tmp;
}
pointCloud->is_dense = false;
cout << "点云共有" << pointCloud->size() << "个点." << endl;
// voxel filter
pcl::VoxelGrid<PointT> voxel_filter;
double resolution = 0.03;
voxel_filter.setLeafSize(resolution, resolution, resolution); // resolution
PointCloud::Ptr tmp(new PointCloud);
voxel_filter.setInputCloud(pointCloud);
voxel_filter.filter(*tmp);
tmp->swap(*pointCloud);
cout << "滤波之后,点云共有" << pointCloud->size() << "个点." << endl;
pcl::io::savePCDFileBinary("map.pcd", *pointCloud);
return 0;
}
2.2 CMakeLists.txt
cmake_minimum_required(VERSION 2.8)
project(dense_RGBD)
set(CMAKE_BUILD_TYPE Release)
set(CMAKE_CXX_STANDARD 14)
# opencv
find_package(OpenCV 3.1 REQUIRED)
include_directories(${OpenCV_INCLUDE_DIRS})
# eigen
include_directories("/usr/include/eigen3/")
# pcl
find_package(PCL REQUIRED)
include_directories(${PCL_INCLUDE_DIRS})
add_definitions(${PCL_DEFINITIONS})
# octomap
#find_package(octomap REQUIRED)
#include_directories(${OCTOMAP_INCLUDE_DIRS})
add_executable(pointcloud_mapping src/pointcloud_mapping.cpp)
target_link_libraries(pointcloud_mapping ${OpenCV_LIBS} ${PCL_LIBRARIES})
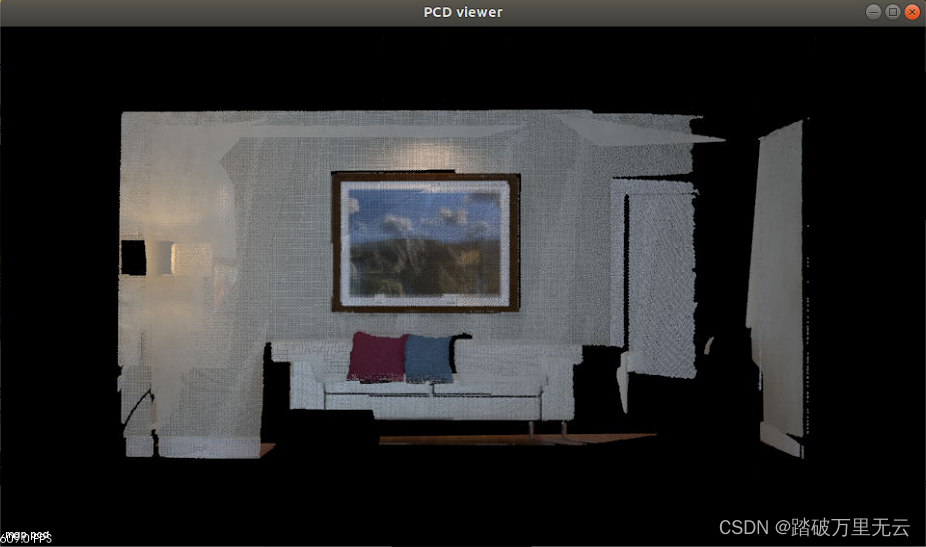
2.3 输出
/home/bupo/my_study/slam14/slam14_my/cap12/dense_RGBD/cmake-build-debug/pointcloud_mapping
正在将图像转换为点云...
转换图像中: 1
转换图像中: 2
转换图像中: 3
转换图像中: 4
转换图像中: 5
点云共有1309800个点.
滤波之后,点云共有296567个点.
进程已结束,退出代码0
- 除此之外,会生成一个
map.pcd文件,使用pcl_viewer查:
3 从点云重建网格
3.1 surfel_mapping.cpp
//
// Created by gaoxiang on 19-4-25.
//
#include <pcl/point_cloud.h>
#include <pcl/point_types.h>
#include <pcl/io/pcd_io.h>
#include <pcl/visualization/pcl_visualizer.h>
#include <pcl/kdtree/kdtree_flann.h>
#include <pcl/surface/surfel_smoothing.h>
#include <pcl/surface/mls.h>
#include <pcl/surface/gp3.h>
#include <pcl/surface/impl/mls.hpp>
// typedefs
typedef pcl::PointXYZRGB PointT;
typedef pcl::PointCloud<PointT> PointCloud;
typedef pcl::PointCloud<PointT>::Ptr PointCloudPtr;
typedef pcl::PointXYZRGBNormal SurfelT;
typedef pcl::PointCloud<SurfelT> SurfelCloud;
typedef pcl::PointCloud<SurfelT>::Ptr SurfelCloudPtr;
SurfelCloudPtr reconstructSurface(
const PointCloudPtr &input, float radius, int polynomial_order) {
pcl::MovingLeastSquares<PointT, SurfelT> mls;
pcl::search::KdTree<PointT>::Ptr tree(new pcl::search::KdTree<PointT>);
mls.setSearchMethod(tree);
mls.setSearchRadius(radius);
mls.setComputeNormals(true);
mls.setSqrGaussParam(radius * radius);
mls.setPolynomialFit(polynomial_order > 1);
mls.setPolynomialOrder(polynomial_order);
mls.setInputCloud(input);
SurfelCloudPtr output(new SurfelCloud);
mls.process(*output);
return (output);
}
pcl::PolygonMeshPtr triangulateMesh(const SurfelCloudPtr &surfels) {
// Create search tree*
pcl::search::KdTree<SurfelT>::Ptr tree(new pcl::search::KdTree<SurfelT>);
tree->setInputCloud(surfels);
// Initialize objects
pcl::GreedyProjectionTriangulation<SurfelT> gp3;
pcl::PolygonMeshPtr triangles(new pcl::PolygonMesh);
// Set the maximum distance between connected points (maximum edge length)
gp3.setSearchRadius(0.05);
// Set typical values for the parameters
gp3.setMu(2.5);
gp3.setMaximumNearestNeighbors(100);
gp3.setMaximumSurfaceAngle(M_PI / 4); // 45 degrees
gp3.setMinimumAngle(M_PI / 18); // 10 degrees
gp3.setMaximumAngle(2 * M_PI / 3); // 120 degrees
gp3.setNormalConsistency(true);
// Get result
gp3.setInputCloud(surfels);
gp3.setSearchMethod(tree);
gp3.reconstruct(*triangles);
return triangles;
}
int main(int argc, char **argv) {
// Load the points
PointCloudPtr cloud(new PointCloud);
if (argc == 0 || pcl::io::loadPCDFile(argv[1], *cloud)) {
cout << "failed to load point cloud!";
return 1;
}
cout << "point cloud loaded, points: " << cloud->points.size() << endl;
// Compute surface elements
cout << "computing normals ... " << endl;
double mls_radius = 0.05, polynomial_order = 2;
auto surfels = reconstructSurface(cloud, mls_radius, polynomial_order);
// Compute a greedy surface triangulation
cout << "computing mesh ... " << endl;
pcl::PolygonMeshPtr mesh = triangulateMesh(surfels);
cout << "display mesh ... " << endl;
pcl::visualization::PCLVisualizer vis;
vis.addPolylineFromPolygonMesh(*mesh, "mesh frame");
vis.addPolygonMesh(*mesh, "mesh");
vis.resetCamera();
vis.spin();
}
3.2 CMakeLists.txt
cmake_minimum_required(VERSION 2.8)
set(CMAKE_BUILD_TYPE Release)
set(CMAKE_CXX_FLAGS "-std=c++11 -O2")
# opencv
find_package(OpenCV REQUIRED)
include_directories(${OpenCV_INCLUDE_DIRS})
# eigen
include_directories("/usr/include/eigen3/")
# pcl
find_package(PCL REQUIRED)
include_directories(${PCL_INCLUDE_DIRS})
add_definitions(${PCL_DEFINITIONS})
add_executable(surfel_mapping src/surfel_mapping.cpp)
target_link_libraries(surfel_mapping ${OpenCV_LIBS} ${PCL_LIBRARIES})
3.3 输出
- 运行可执行程序
bupo@bupo-vpc:~/my_study/slam14/slam14_my/cap12/surfel_mapping/cmake-build-debug$ ./surfel_mapping ../map.pcd
point cloud loaded, points: 296567
computing normals ...
computing mesh ...
display mesh ...
图片如下:
4. octomap的安装
- 获取官方安装包:https://github.com/OctoMap/octomap.git
- 或者网盘自取:链接: https://pan.baidu.com/s/1bGJjLnjAyOypby7O502oP 提取码: 1mcr
- 主要是安装
octomap和octovis
4.1 octomap的安装
4.1.1 安装依赖项
sudo apt-get install doxygen
sudo apt-get install cmake doxygen libqt4-dev libqt4-opengl-dev libqglviewer-dev-qt4
4.1.2 安装
- 可以查看下的安装包里面自带的readme.txt
cd octomap/octomap/
mkdir build && cd build
cmake ..
make
sudo make install
4.1.3 测试
cd octomap/octomap/build/
make test
输出
bupo@bupo-vpc:~/anzhuang/octomap/octomap/build$ make test
Running tests...
Test project /home/bupo/anzhuang/octomap/octomap/build
Start 1: MathVector
1/15 Test #1: MathVector ....................... Passed 0.01 sec
Start 2: MathPose
2/15 Test #2: MathPose ......................... Passed 0.00 sec
Start 3: InsertRay
3/15 Test #3: InsertRay ........................ Passed 0.65 sec
Start 4: InsertScan
4/15 Test #4: InsertScan ....................... Passed 0.28 sec
Start 5: ReadGraph
5/15 Test #5: ReadGraph ........................ Passed 0.01 sec
Start 6: StampedTree
6/15 Test #6: StampedTree ...................... Passed 1.02 sec
Start 7: OcTreeKey
7/15 Test #7: OcTreeKey ........................ Passed 0.00 sec
Start 8: test_scans
8/15 Test #8: test_scans ....................... Passed 0.10 sec
Start 9: test_raycasting
9/15 Test #9: test_raycasting .................. Passed 0.97 sec
Start 10: test_io
10/15 Test #10: test_io .......................... Passed 0.34 sec
Start 11: test_pruning
11/15 Test #11: test_pruning ..................... Passed 0.02 sec
Start 12: test_iterators
12/15 Test #12: test_iterators ................... Passed 0.38 sec
Start 13: test_mapcollection
13/15 Test #13: test_mapcollection ............... Passed 0.15 sec
Start 14: test_color_tree
14/15 Test #14: test_color_tree .................. Passed 0.05 sec
Start 15: test_bbx
15/15 Test #15: test_bbx ......................... Passed 0.00 sec
100% tests passed, 0 tests failed out of 15
Total Test time (real) = 3.98 sec
4.1.4 使用中的CMakeLists.txt
find_package(octomap REQUIRED)
include_directories(${OCTOMAP_INCLUDE_DIRS})
target_link_libraries(xxx ${OCTOMAP_LIBRARIES})
4.1.5 使用中的头文件
#include <octomap/octomap.h> // for octomap
4.2 octovis
4.2.1 依赖库
在之前编译 octovis 时,我们实际上安装了一个可视化程序,即 octovis:
sudo apt-get install libqglviewer-dev-qt4
sudo apt-get install liboctomap-dev octovis
4.2.2 安装
cd /octomap/octovis
mkdir build
cd build
cmake ..
make
sudo make install
4.2.3 使用
运行
bupo@bupo-vpc:~/anzhuang/octomap/octomap$ octovis
Usage: octovis [mapfile] [tree depth cutoff]
Where the optional [tree depth cutoff] is an integer from 1 to 16
5 实践:八叉树地图
5.1 octomap_mapping.cpp
#include <iostream>
#include <fstream>
using namespace std;
#include <opencv2/core/core.hpp>
#include <opencv2/highgui/highgui.hpp>
#include <octomap/octomap.h> // for octomap
#include <Eigen/Geometry>
#include <boost/format.hpp> // for formating strings
int main(int argc, char **argv) {
vector<cv::Mat> colorImgs, depthImgs; // 彩色图和深度图
vector<Eigen::Isometry3d> poses; // 相机位姿
ifstream fin("./data/pose.txt");
if (!fin) {
cerr << "cannot find pose file" << endl;
return 1;
}
for (int i = 0; i < 5; i++) {
boost::format fmt("./data/%s/%d.%s"); //图像文件格式
colorImgs.push_back(cv::imread((fmt % "color" % (i + 1) % "png").str()));
depthImgs.push_back(cv::imread((fmt % "depth" % (i + 1) % "png").str(), -1)); // 使用-1读取原始图像
double data[7] = {0};
for (int i = 0; i < 7; i++) {
fin >> data[i];
}
Eigen::Quaterniond q(data[6], data[3], data[4], data[5]);
Eigen::Isometry3d T(q);
T.pretranslate(Eigen::Vector3d(data[0], data[1], data[2]));
poses.push_back(T);
}
// 计算点云并拼接
// 相机内参
double cx = 319.5;
double cy = 239.5;
double fx = 481.2;
double fy = -480.0;
double depthScale = 5000.0;
cout << "正在将图像转换为 Octomap ..." << endl;
// octomap tree
octomap::OcTree tree(0.01); // 参数为分辨率
for (int i = 0; i < 5; i++) {
cout << "转换图像中: " << i + 1 << endl;
cv::Mat color = colorImgs[i];
cv::Mat depth = depthImgs[i];
Eigen::Isometry3d T = poses[i];
octomap::Pointcloud cloud; // the point cloud in octomap
for (int v = 0; v < color.rows; v++)
for (int u = 0; u < color.cols; u++) {
unsigned int d = depth.ptr<unsigned short>(v)[u]; // 深度值
if (d == 0) continue; // 为0表示没有测量到
Eigen::Vector3d point;
point[2] = double(d) / depthScale;
point[0] = (u - cx) * point[2] / fx;
point[1] = (v - cy) * point[2] / fy;
Eigen::Vector3d pointWorld = T * point;
// 将世界坐标系的点放入点云
cloud.push_back(pointWorld[0], pointWorld[1], pointWorld[2]);
}
// 将点云存入八叉树地图,给定原点,这样可以计算投射线
tree.insertPointCloud(cloud, octomap::point3d(T(0, 3), T(1, 3), T(2, 3)));
}
// 更新中间节点的占据信息并写入磁盘
tree.updateInnerOccupancy();
cout << "saving octomap ... " << endl;
tree.writeBinary("octomap.bt");
return 0;
}
5.2 CMakeLists.txt
cmake_minimum_required(VERSION 2.8)
project(octomap_mapping)
set(CMAKE_BUILD_TYPE Release)
set(CMAKE_CXX_STANDARD 14)
# opencv
find_package(OpenCV REQUIRED)
include_directories(${OpenCV_INCLUDE_DIRS})
# eigen
include_directories("/usr/include/eigen3/")
# pcl
find_package(PCL REQUIRED)
include_directories(${PCL_INCLUDE_DIRS})
add_definitions(${PCL_DEFINITIONS})
# octomap
find_package(octomap REQUIRED)
include_directories(${OCTOMAP_INCLUDE_DIRS})
add_executable(octomap_mapping src/octomap_mapping.cpp)
target_link_libraries(octomap_mapping ${OpenCV_LIBS} ${PCL_LIBRARIES} ${OCTOMAP_LIBRARIES})
5.3 输出
- 运行可执行文件
bupo@bupo-vpc:~/my_study/slam14/slam14_my/cap12/octomap_mapping$ ./cmake-build-debug/octomap_mapping
输出:
/home/bupo/my_study/slam14/slam14_my/cap12/octomap_mapping/cmake-build-debug/octomap_mapping
正在将图像转换为 Octomap ...
转换图像中: 1
转换图像中: 2
转换图像中: 3
转换图像中: 4
转换图像中: 5
saving octomap ...
进程已结束,退出代码0
-
还会在工程主路径下生成一个
octomap.bt文件,可自取:链接: https://pan.baidu.com/s/1Bs5NnZgDRo7RZjNpvXz24g 提取码: 0aln -
然后可以使用
octovis打开
bupo@bupo-vpc:~/my_study/slam14/slam14_my/cap12/octomap_mapping/cmake-build-debug$ octovis ../octomap.bt
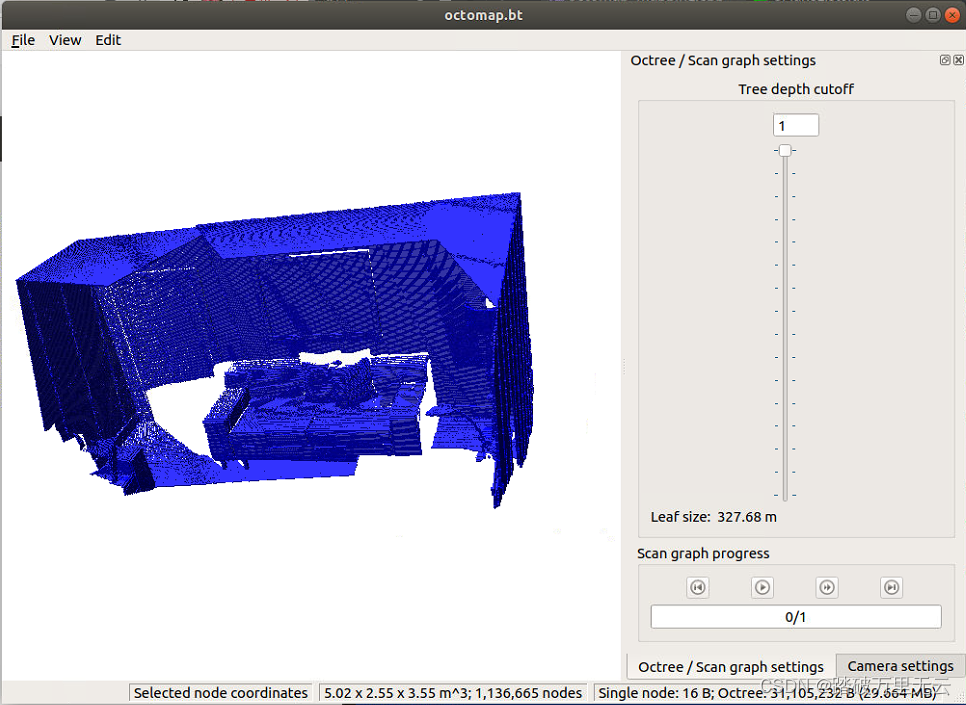
- 可视化界面简单,按下1键,可根据高度信息着色,
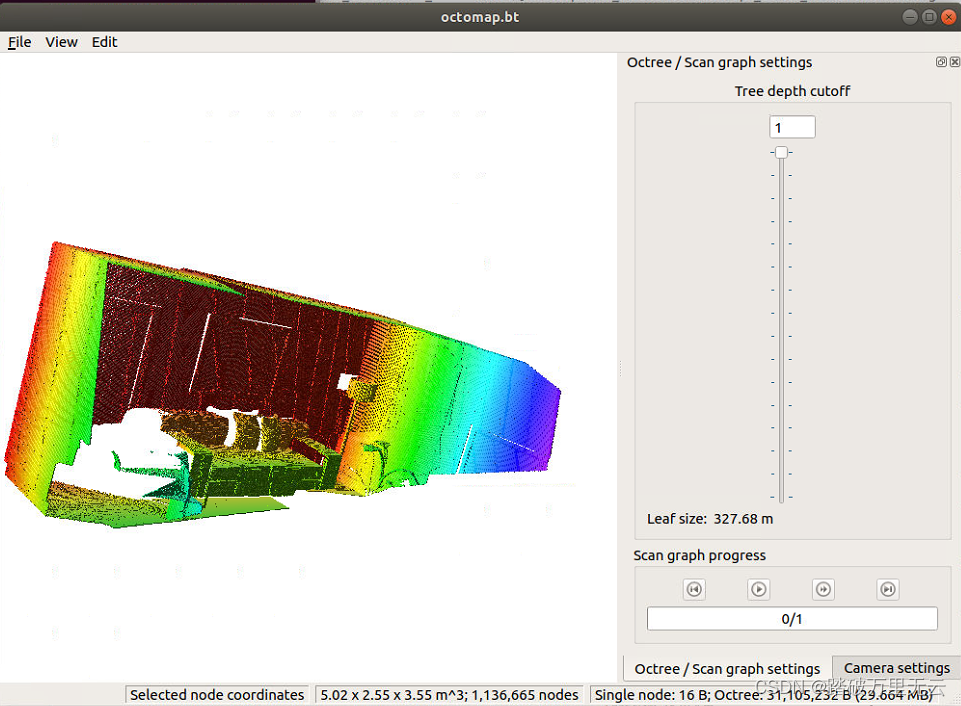
- 在右侧有八叉树地深度限制条,这里可以调节地图的分辨率。
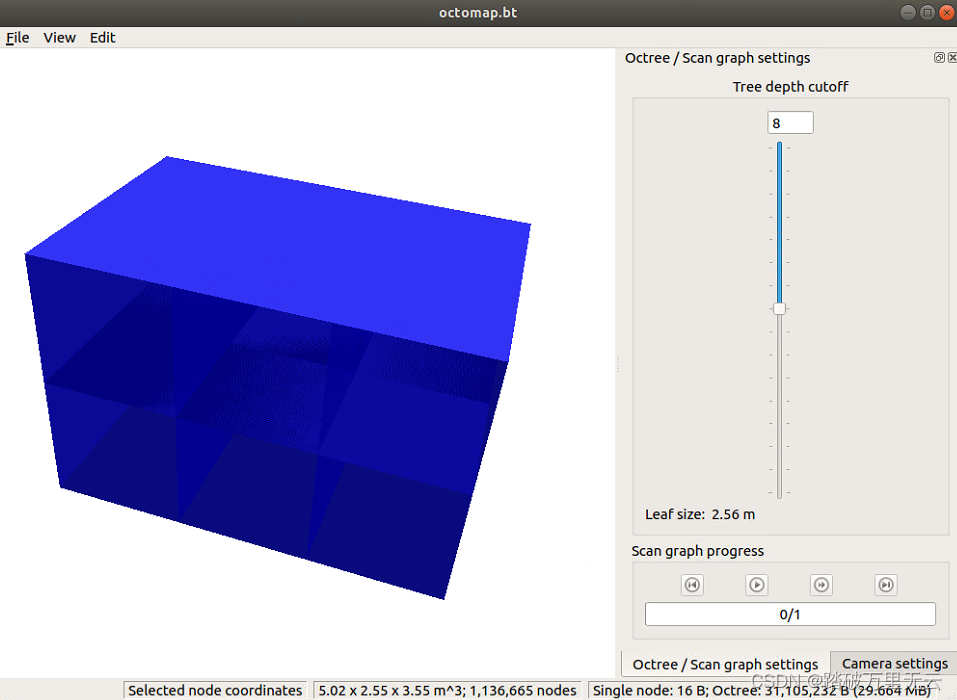
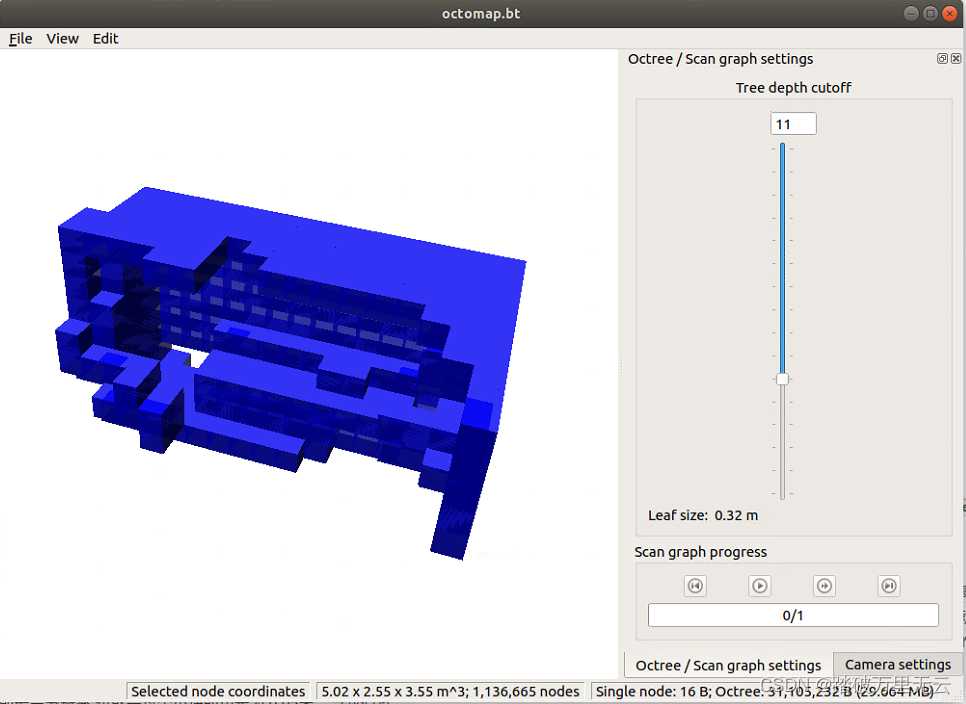
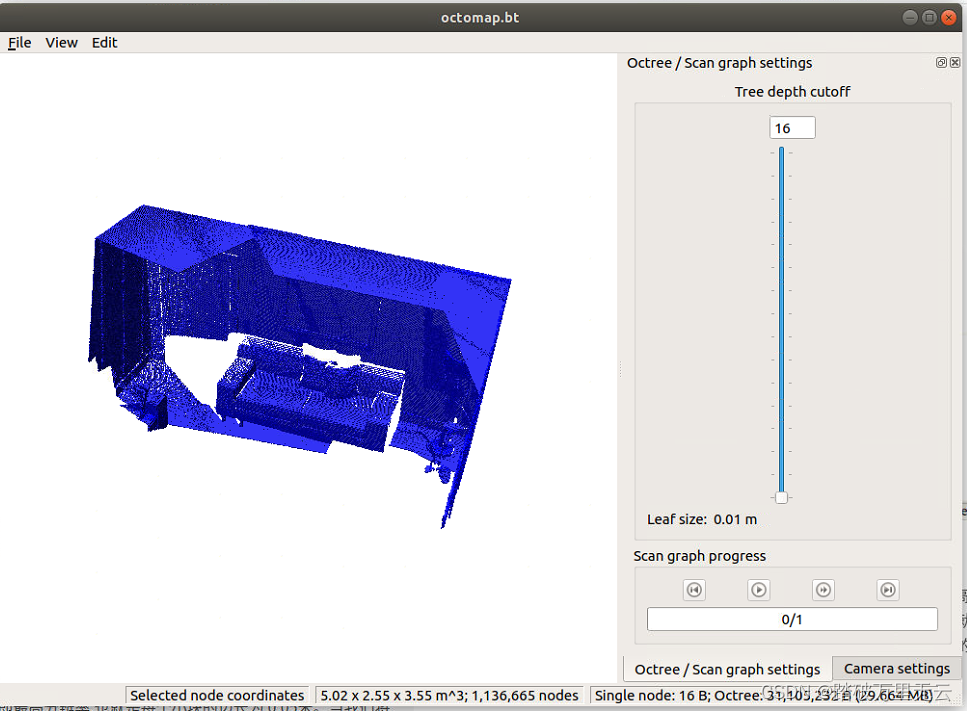
- 由于我们构造时使用的默认深度是 16 层,所以这里显示 16 层的话即最高分辨率,也就是每个小块的边长为 0.05米。当我们将深度减少一层时,八叉树的叶子节点往上提了一层,每个小块的边长就增加两倍,变成 0.1 米。可以看到,我们能够很容易地调节地图分辨率以适应不同的场合。Octomap 还有一些可以探索的地方,例如,我们可以方便地查询任意点的占据概率,以此设计在地图中进行导航的方法。
6 课后题
6.1 第二题和第三题合并(使用半稠密和逆深度)
- 本工程采用的数据集是使用REMODE的测试数据集。它提供了一架无人集采集的单目俯视图像,共有200张,同时提供了每张图像的真实位姿数据集自取:链接: https://pan.baidu.com/s/1X9Y3fo8M2mFLdHh0YoN9dA 提取码: rpow
- 整个工程出去数据集自取:链接: https://pan.baidu.com/s/19pkkGewg4lhOOE595E16WQ 提取码: bf26
- 整个工程自取:
6.1.1 ban_dense_inversedepth.cpp
#include <iostream>
#include <vector>
#include <fstream>
using namespace std;
#include <boost/timer.hpp>
// for sophus
#include <sophus/se3.h>
using Sophus::SE3;
// for eigen
#include <Eigen/Core>
#include <Eigen/Geometry>
using namespace Eigen;
#include <opencv2/core/core.hpp>
#include <opencv2/highgui/highgui.hpp>
#include <opencv2/imgproc/imgproc.hpp>
using namespace cv;
/**********************************************
* 本程序演示了单目相机在已知轨迹下的稠密深度估计
* 使用极线搜索 + NCC 匹配的方式,与书本的 13.2 节对应
* 请注意本程序并不完美,你完全可以改进它——我其实在故意暴露一些问题。
***********************************************/
// ------------------------------------------------------------------
// parameters
const int boarder = 20; // 边缘宽度
const int width = 640; // 宽度
const int height = 480; // 高度
const double fx = 481.2f; // 相机内参
const double fy = -480.0f;
const double cx = 319.5f;
const double cy = 239.5f;
const int ncc_window_size = 2; // NCC 取的窗口半宽度
const int ncc_area = (2*ncc_window_size+1)*(2*ncc_window_size+1); // NCC窗口面积
const double min_cov = 0.001; // 收敛判定:最小方差
const double max_cov = 0.5; // 发散判定:最大方差
// ------------------------------------------------------------------
// 重要的函数
// 从 REMODE 数据集读取数据
bool readDatasetFiles(
const string& path,
vector<string>& color_image_files,
vector<SE3>& poses
);
// 根据新的图像更新深度估计
bool update(
const Mat& ref,
const Mat& curr,
const SE3& T_C_R,
Mat& depth,
Mat& depth_cov
);
// 极线搜索
bool epipolarSearch(
const Mat& ref,
const Mat& curr,
const SE3& T_C_R,
const Vector2d& pt_ref,
const double& depth_mu,
const double& depth_cov,
Vector2d& pt_curr
);
// 更新深度滤波器
bool updateDepthFilter(
const Vector2d& pt_ref,
const Vector2d& pt_curr,
const SE3& T_C_R,
Mat& depth,
Mat& depth_cov
);
// 计算 NCC 评分
double NCC( const Mat& ref, const Mat& curr, const Vector2d& pt_ref, double depth, Vector2d& pt_cur, const SE3& T_C_R );
// 双线性灰度插值
inline double getBilinearInterpolatedValue( const Mat& img, const Vector2d& pt ) {
uchar* d = & img.data[ int(pt(1,0))*img.step+int(pt(0,0)) ];
double xx = pt(0,0) - floor(pt(0,0));
double yy = pt(1,0) - floor(pt(1,0));
return (( 1-xx ) * ( 1-yy ) * double(d[0]) +
xx* ( 1-yy ) * double(d[1]) +
( 1-xx ) *yy* double(d[img.step]) +
xx*yy*double(d[img.step+1]))/255.0;
}
// ------------------------------------------------------------------
// 一些小工具
// 显示估计的深度图
void plotDepth( const Mat& depth );
// 像素到相机坐标系
inline Vector3d px2cam ( const Vector2d px ) {
return Vector3d (
(px(0,0) - cx)/fx,
(px(1,0) - cy)/fy,
1
);
}
// 相机坐标系到像素
inline Vector2d cam2px ( const Vector3d p_cam ) {
return Vector2d (
p_cam(0,0)*fx/p_cam(2,0) + cx,
p_cam(1,0)*fy/p_cam(2,0) + cy
);
}
// 检测一个点是否在图像边框内
inline bool inside( const Vector2d& pt ) {
return pt(0,0) >= boarder && pt(1,0)>=boarder
&& pt(0,0)+boarder<width && pt(1,0)+boarder<=height;
}
// ------------------------------------------------------------------
int main( int argc, char** argv )
{
if ( argc != 2 )
{
cout<<"Usage: dense_mapping path_to_test_dataset"<<endl;
return -1;
}
// 从数据集读取数据
vector<string> color_image_files;
vector<SE3> poses_TWC;
bool ret = readDatasetFiles( argv[1], color_image_files, poses_TWC );
if ( ret==false )
{
cout<<"Reading image files failed!"<<endl;
return -1;
}
cout<<"read total "<<color_image_files.size()<<" files."<<endl;
// 第一张图
Mat ref = imread( color_image_files[0], 0 ); // gray-scale image
SE3 pose_ref_TWC = poses_TWC[0];
double init_depth = 3.0; // 深度初始值
double init_cov2 = 0.1; // 方差初始值
Mat depth( height, width, CV_64F, init_depth ); // 深度图
Mat depth_cov( height, width, CV_64F, init_cov2 ); // 深度图方差
for ( int index=1; index<color_image_files.size(); index++ )
{
cout<<"*** loop "<<index<<" ***"<<endl;
Mat curr = imread( color_image_files[index], 0 );
if (curr.data == nullptr) continue;
SE3 pose_curr_TWC = poses_TWC[index];
SE3 pose_T_C_R = pose_curr_TWC.inverse() * pose_ref_TWC; // 坐标转换关系: T_C_W * T_W_R = T_C_R
update( ref, curr, pose_T_C_R, depth, depth_cov );
plotDepth( depth );
imshow("image", curr);
waitKey(1);
}
cout<<"estimation returns, saving depth map ..."<<endl;
imwrite( "depth.png", depth );
cout<<"done."<<endl;
// 导出稀疏点云
ofstream points("point.xyz");
for ( int x=boarder; x<width-boarder; x++ )
{
for ( int y=boarder; y<height-boarder; y++ )
{
// 遍历每个像素
if ( depth_cov.ptr<double>(y)[x] > min_cov ) // 深度已收敛或发散
continue;
Vector3d f_ref = px2cam( Vector2d(x,y) );
f_ref.normalize();
Vector3d P_ref = f_ref*depth.ptr<double>(y)[x]; // 参考帧的 P 向量
points<<P_ref(0)<<"\t"<<P_ref(1)<<"\t"<<P_ref(2)<<"\t"
<<int(ref.ptr<uchar>(y)[x])<<"\t"<<int(ref.ptr<uchar>(y)[x])<<"\t"<<int(ref.ptr<uchar>(y)[x])<<"\t"<<endl;
}
}
return 0;
}
bool readDatasetFiles(
const string& path,
vector< string >& color_image_files,
std::vector<SE3>& poses
)
{
ifstream fin( path+"/first_200_frames_traj_over_table_input_sequence.txt");
if ( !fin ) return false;
while ( !fin.eof() )
{
// 数据格式:图像文件名 tx, ty, tz, qx, qy, qz, qw ,注意是 TWC 而非 TCW
string image;
fin>>image;
double data[7];
for ( double& d:data ) fin>>d;
color_image_files.push_back( path+string("/images/")+image );
poses.push_back(
SE3( Quaterniond(data[6], data[3], data[4], data[5]),
Vector3d(data[0], data[1], data[2]))
);
if ( !fin.good() ) break;
}
return true;
}
// 对整个深度图进行更新
bool update(const Mat& ref, const Mat& curr, const SE3& T_C_R, Mat& depth, Mat& depth_cov )
{
#pragma omp parallel for
for ( int x=boarder; x<width-boarder; x++ )
#pragma omp parallel for
for ( int y=boarder; y<height-boarder; y++ )
{
// 此处就是把梯度明显的区域挑选出来
// 进而从稠密深度估计变成半稠密深度估计
// 计算梯度
Eigen::Vector2d delta (
ref.ptr<uchar>(y)[x+1] - ref.ptr<uchar>(y)[x-1],
ref.ptr<uchar>(y+1)[x] - ref.ptr<uchar>(y-1)[x]
);
// 把梯度小的区域过滤到
if ( delta.norm() < 50 )
continue;
// 遍历每个像素
if ( depth_cov.ptr<double>(y)[x] < min_cov || depth_cov.ptr<double>(y)[x] > max_cov ) // 深度已收敛或发散
continue;
// 在极线上搜索 (x,y) 的匹配
Vector2d pt_curr;
bool ret = epipolarSearch (
ref,
curr,
T_C_R,
Vector2d(x,y),
depth.ptr<double>(y)[x],
sqrt(depth_cov.ptr<double>(y)[x]),
pt_curr
);
if ( ret == false ) // 匹配失败
continue;
// 取消该注释以显示匹配
// showEpipolarMatch( ref, curr, Vector2d(x,y), pt_curr );
// 匹配成功,更新深度图
updateDepthFilter( Vector2d(x,y), pt_curr, T_C_R, depth, depth_cov );
}
}
// 极线搜索
// 方法见书 13.2 13.3 两节
bool epipolarSearch(
const Mat& ref, const Mat& curr,
const SE3& T_C_R, const Vector2d& pt_ref,
const double& depth_mu, const double& depth_cov,
Vector2d& pt_curr )
{
// 此处是为逆深度做准备
// 因此需要根据方差求解出逆深度的范围
double d_min = 1/depth_mu-3*depth_cov, d_max = 1/depth_mu+3*depth_cov;
// 防止小于0
if(d_min<0) d_min = 0.2;
// 求出深度范围
double dd_max = 1/d_min;
double dd_min = 1/d_max;
if ( dd_min<0.1 ) dd_min = 0.1;
// 在极线上搜索,以深度均值点为中心,左右各取半长度
double best_ncc = -1.0;
Vector2d best_px_curr;
for ( double l=dd_min; l<=dd_max; l+=0.1 ) // l+=sqrt(2)
{
// 计算待匹配点与参考帧的 NCC
Vector2d px_curr;
// 此处是增加了放射变换的NCC计算
double ncc = NCC( ref, curr, pt_ref, l, px_curr, T_C_R);
if ( ncc>best_ncc )
{
best_ncc = ncc;
best_px_curr = px_curr;
}
}
if ( best_ncc < 0.85f ) // 只相信 NCC 很高的匹配
return false;
pt_curr = best_px_curr;
return true;
}
double NCC (
const Mat& ref, const Mat& curr,
const Vector2d& pt_ref, double depth,
Vector2d& pt_cur,
const SE3& T_C_R
)
{
// 零均值-归一化互相关
// 先算均值
double mean_ref = 0, mean_curr = 0;
vector<double> values_ref, values_curr; // 参考帧和当前帧的均值
// 以下代码中又进行放射变换计算的代码
// 其核心思路是假设参考影像上一点附近都为一个平面且深度都一样
for ( int x=-ncc_window_size; x<=ncc_window_size; x++ )
for ( int y=-ncc_window_size; y<=ncc_window_size; y++ )
{
// 从像平面坐标系到像空间坐标系
Vector2d pointRef(int(x+pt_ref(0,0)),int(y+pt_ref(1,0)));
Vector3d f_ref = px2cam( pointRef );
f_ref.normalize();
double value_ref = double(ref.ptr<uchar>( int(pointRef(1,0)) )[ int(pointRef(0,0)) ])/255.0;
mean_ref += value_ref;
// 根据放射变换算出到参考影像上的坐标
Vector3d P_ref = f_ref*depth; // 参考帧的 P 向量
Vector2d px_curr = cam2px( T_C_R*P_ref ); // 按深度均值投影的像素
if( x==0 && y==0 )
{
pt_cur = px_curr;
}
if ( !inside(px_curr) )
return -1.0;
double value_curr = getBilinearInterpolatedValue( curr, px_curr );
mean_curr += value_curr;
values_ref.push_back(value_ref);
values_curr.push_back(value_curr);
}
mean_ref /= ncc_area;
mean_curr /= ncc_area;
// 计算 Zero mean NCC
double numerator = 0, demoniator1 = 0, demoniator2 = 0;
for ( int i=0; i<values_ref.size(); i++ )
{
double n = (values_ref[i]-mean_ref) * (values_curr[i]-mean_curr);
numerator += n;
demoniator1 += (values_ref[i]-mean_ref)*(values_ref[i]-mean_ref);
demoniator2 += (values_curr[i]-mean_curr)*(values_curr[i]-mean_curr);
}
return numerator / sqrt( demoniator1*demoniator2+1e-10 ); // 防止分母出现零
}
bool updateDepthFilter(
const Vector2d& pt_ref,
const Vector2d& pt_curr,
const SE3& T_C_R,
Mat& depth,
Mat& depth_cov
)
{
// 我是一只喵
// 不知道这段还有没有人看
// 用三角化计算深度
SE3 T_R_C = T_C_R.inverse();
Vector3d f_ref = px2cam( pt_ref );
f_ref.normalize();
Vector3d f_curr = px2cam( pt_curr );
f_curr.normalize();
// 方程
// d_ref * f_ref = d_cur * ( R_RC * f_cur ) + t_RC
// => [ f_ref^T f_ref, -f_ref^T f_cur ] [d_ref] = [f_ref^T t]
// [ f_cur^T f_ref, -f_cur^T f_cur ] [d_cur] = [f_cur^T t]
// 二阶方程用克莱默法则求解并解之
Vector3d t = T_R_C.translation();
Vector3d f2 = T_R_C.rotation_matrix() * f_curr;
Vector2d b = Vector2d ( t.dot ( f_ref ), t.dot ( f2 ) );
double A[4];
A[0] = f_ref.dot ( f_ref );
A[2] = f_ref.dot ( f2 );
A[1] = -A[2];
A[3] = - f2.dot ( f2 );
double d = A[0]*A[3]-A[1]*A[2];
Vector2d lambdavec =
Vector2d ( A[3] * b ( 0,0 ) - A[1] * b ( 1,0 ),
-A[2] * b ( 0,0 ) + A[0] * b ( 1,0 )) /d;
Vector3d xm = lambdavec ( 0,0 ) * f_ref;
Vector3d xn = t + lambdavec ( 1,0 ) * f2;
Vector3d d_esti = ( xm+xn ) / 2.0; // 三角化算得的深度向量
double depth_estimation = d_esti.norm(); // 深度值
// 计算不确定性(以一个像素为误差)
Vector3d p = f_ref*depth_estimation;
Vector3d a = p - t;
double t_norm = t.norm();
double a_norm = a.norm();
double alpha = acos( f_ref.dot(t)/t_norm );
double beta = acos( -a.dot(t)/(a_norm*t_norm));
double beta_prime = beta + atan(1/fx);
double gamma = M_PI - alpha - beta_prime;
double p_prime = t_norm * sin(beta_prime) / sin(gamma);
// 逆深度的方差更新方式
double d_cov = 1/p_prime - 1/depth_estimation;
double d_cov2 = d_cov*d_cov;
// 高斯融合
double mu = depth.ptr<double>( int(pt_ref(1,0)) )[ int(pt_ref(0,0)) ];
double sigma2 = depth_cov.ptr<double>( int(pt_ref(1,0)) )[ int(pt_ref(0,0)) ];
double mu_fuse = (d_cov2/mu+sigma2/depth_estimation) / ( sigma2+d_cov2);
double sigma_fuse2 = ( sigma2 * d_cov2 ) / ( sigma2 + d_cov2 );
depth.ptr<double>( int(pt_ref(1,0)) )[ int(pt_ref(0,0)) ] = 1/mu_fuse;
depth_cov.ptr<double>( int(pt_ref(1,0)) )[ int(pt_ref(0,0)) ] = sigma_fuse2;
return true;
}
// 后面这些太简单我就不注释了(其实是因为懒)
void plotDepth(const Mat& depth)
{
imshow( "depth", depth*0.4 );
waitKey(1);
}
6.1.2 CMakeLists.txt
cmake_minimum_required(VERSION 2.8)
project(ban_dense_inversedepth)
set(CMAKE_BUILD_TYPE Release)
set(CMAKE_CXX_STANDARD 14)
#sophus
find_package(Sophus REQUIRED)
include_directories(${Sophus_INCLUDE_DIRS})
set(Sophus_LIBRARIES "/usr/local/lib/libSophus.so")
# opencv
find_package(OpenCV REQUIRED)
include_directories(${OpenCV_INCLUDE_DIRS})
# eigen
include_directories("/usr/include/eigen3/")
# pcl
find_package(PCL REQUIRED)
include_directories(${PCL_INCLUDE_DIRS})
add_definitions(${PCL_DEFINITIONS})
add_executable(ban_dense_inversedepth src/ban_dense_inversedepth.cpp)
target_link_libraries(ban_dense_inversedepth ${OpenCV_LIBS} ${PCL_LIBRARIES} ${Sophus_LIBRARIES} fmt)
6.1.3 输出
- 运行可执行程序
bupo@bupo-vpc:~/my_study/slam14/slam14_my/cap12/ban_dense_inversedepth/cmake-build-debug$ ./ban_dense_inversedepth ../../remode_test_data/test_data/
read total 202 files.
*** loop 1 ***
*** loop 2 ***
*** loop 200 ***
*** loop 201 ***
estimation returns, saving depth map ...
done.
- 会生成两个文件
depth.png和point.xyz,可自取:链接: https://pan.baidu.com/s/1116Fa71ktWl1Fko0hZSgUg 提取码: lb2k - 这里
point.xyz要使用meshLab查看,其安装教程可参考:【slam十四讲第二版】【课本例题代码向】【第九讲~后端Ⅰ】【安装Meshlab】【BAL数据集格式】【ceres求解BA】【g2o求解BA】的1 安装Meshlab: 三维几何网格处理 - 可视化如下"
















 2144
2144











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









