









今天在启动rviz时发生一个很奇怪的报错:
rviz: error while loading shared libraries: librviz.so: cannot open shared object file: No such file or directory
我感觉很纳闷!再试着启动一下roscore,发现如下报错:
[rosout-1] process has died [pid 5589, exit code 127, cmd /opt/ros/noetic/lib/rosout/rosout __name:=rosout __log:=/home/hjx/.ros/log/a367df56-12cf-11ef-aeee-47c0072ffa95/rosout-1.log].
log file: /home/hjx/.ros/log/a367df56-12cf-11ef-aeee-47c0072ffa95/rosout-1*.log
我已经裂开,心里想着ros用着用着还能消失?于是查看了.bashrc文件的环境变量:

发现环境变量是存在的,我已经不知所措了这时候!
一个神奇的解决方法被我不经意之间尝试了出来,就是将上面红色方框的环境变量移动至最后:

保存后再次执行roscore,发现恢复了正常:
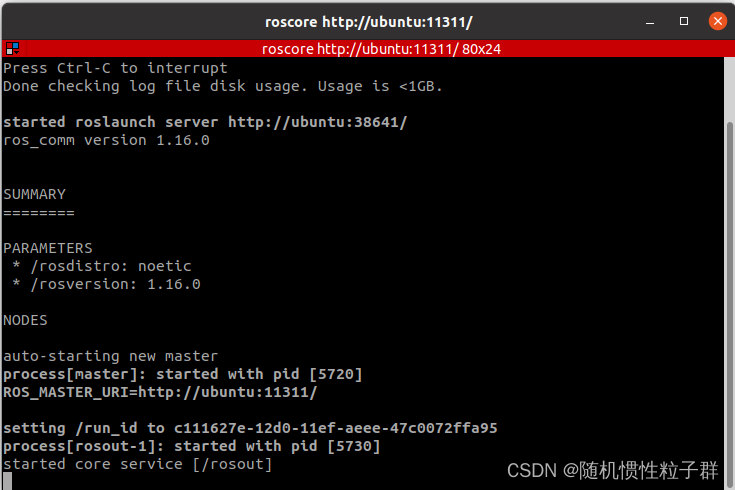
哦~~~这可真是一个玄学~
补充:gazebo启动报错的解决方法
[gazebo-1] process has died
[gazebo-1] process has died [pid 680197, exit code 255, cmd /opt/ros/noetic/lib/gazebo_ros/gzserver -e ode /home/dzh/catkin_ws/src/urdf02_gazebo/worlds/box_house.world __name:=gazebo __log:=/home/dzh/.ros/log/3bfeccae-e2d1-11ee-b6da-a7764fbc4b10/gazebo-1.log].
原因:反复关闭启动gazebo太多次,前面进程未完全杀死导致冲突
解决方法:
killall gzserver
或者重启/source等刷新操作
















 789
789

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











