







目录
(2)LGT8F328P版Arduino nano在Arduino IDE里添加硬件配置(windows+ubuntu)
(1)Moveit白泽四足机器人联合控制(GUI界面和实物同步)
(2)白泽四足机器人ROS+rviz仿真(一)正逆运动学(单腿)
(4)白泽四足机器人ROS+rviz仿真(三)整体前后左右(手机蓝牙遥控)
1.机器人介绍
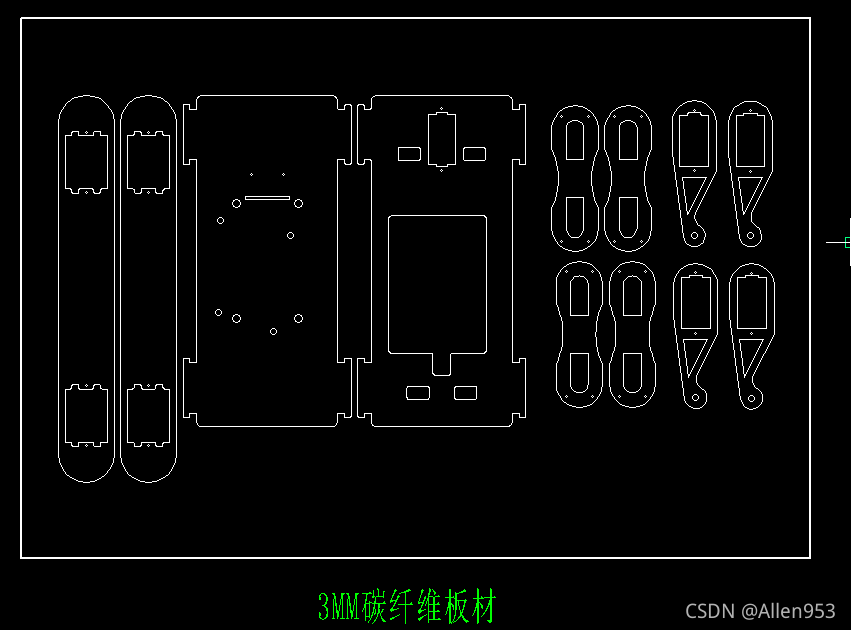
白泽四足机器人是作者在玩过Opencat之后,设xiu计gai的一款四足机器人,这款四足机器人同样有3D打印版本和CAD激光切割版本,3D打印版本和CAD激光切割版本图纸也都开源,想要3D打印的小伙伴可以打印出来,想要激光切割的小伙伴可以下载cad图纸用激光切割机,任意切割木板、亚克力或碳纤维材质的零件,没有激光切割机的也可以拿图纸去淘宝代加工,挺方便的。我这里自己切割的木板零件,具体图纸在gitee链接可以看到。这款机器人可以自己编程玩耍,同时也兼容了Opencat的程序(只需要拆下来换一种安装方式即可),这里可以通过该机器人学习编程和ROS机器人操作系统,一起交流玩耍吧!有什么建议欢迎留言互相交流!
交流QQ群:531750644
项目地址:刘志通/arduino白泽四足机器人
bilibili主页:Allen-Liu95的个人空间_哔哩哔哩_Bilibili
开源协议
任何人均可自由复制、分享、修改该图纸和资料,可免费拿图纸生产、销售相关产品,主体需注明来源且标明“白泽机器人”五字即可。
零件制作
CAD激光切割版本
在gitee链接下的“baize-cad”文件夹中
成品展示(我这里用椴木板切割的)
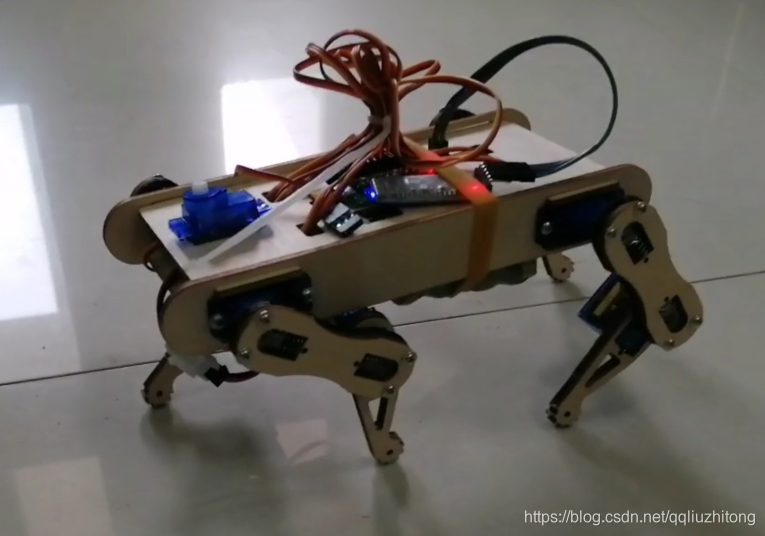
想要购买木制零件可以找我:闲鱼搜索用户“LIGTEC”

下面有视频介绍:
白泽四足
3D打印版本图纸
在gitee链接下的“baize-model1”和"baize-model2"文件夹中
2.组装调试教程
(1)配置库文件
(2)LGT8F328P版Arduino nano在Arduino IDE里添加硬件配置(windows+ubuntu)
(3)组装
大小腿组装
(4)接线&&上传程序&&调试:
白泽程序玩法:
(1)3D打印零件
(2)接线
(3)上传程序
Opencat程序玩法:
(1)接线
(3)校准关节和陀螺仪
(5)下载安装配置蓝牙app
3.学习教程
联合matlab:
(1)足端轨迹规划与求解——matlab逆运动学求解器。
联合ros:
(1)Moveit白泽四足机器人联合控制(GUI界面和实物同步)
(2)白泽四足机器人ROS+rviz仿真(一)正逆运动学(单腿)
(3)白泽四足机器人ROS+rviz仿真(二)整体行走步态
(4)白泽四足机器人ROS+rviz仿真(三)整体前后左右(手机蓝牙遥控)
待更新
持续更新中!!!!!!!!!!!!


















 2416
2416

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











