






 特斯拉通过低BOM成本的FSD硬件、纯视觉感知方案和高效云端算力,实现了大规模的城市NOA系统。FSDBeta已有40万用户,主要依赖8个摄像头和144Tops的FSD计算平台。相比之下,其他厂商如理想、小鹏等采用更高成本方案。特斯拉的数据驱动和算法优化策略,以及自研的云端训练芯片Dojo,为自动驾驶性能提升提供了强大支持。即将推出的HW4.0和Model3改款也将带来新的进展。
特斯拉通过低BOM成本的FSD硬件、纯视觉感知方案和高效云端算力,实现了大规模的城市NOA系统。FSDBeta已有40万用户,主要依赖8个摄像头和144Tops的FSD计算平台。相比之下,其他厂商如理想、小鹏等采用更高成本方案。特斯拉的数据驱动和算法优化策略,以及自研的云端训练芯片Dojo,为自动驾驶性能提升提供了强大支持。即将推出的HW4.0和Model3改款也将带来新的进展。
作者 | 树人
编辑 | 德新

根据特斯拉2022年Q4的财务文件披露:FSD Beta已有将近40万用户。
这是目前全世界部署规模最大的城市NOA系统。
而特斯拉实现这样一套系统,在车端几乎仅用了8个摄像头和144 Tops算力的FSD计算平台。这种性能压榨和成本控制能力让业界羡慕不已。
理想汽车CEO李想就直言:特斯拉Autopilot的硬件BOM成本在差不多1500美元,而(理想、小鹏等)使用双OrinX的方案成本基本都在4000美金以上。
特斯拉如何用大幅低于业界的成本实现了城市NOA。这篇文章,我们就来重点看看:
•FSD的BOM成本;
•特斯拉把基于视觉的单模态感知发挥到了极致;
•车端算力有限,但云端算力无限;
•HW 4.0的动向和趋势。
一. 硬件成本:FSD< 业界主流方案的一半

目前新势力主流支持到城市NOA的智驾方案,理想和小鹏采用双OrinX作为计算单元,蔚来甚至豪横地用了4个。
我们以理想AD Max举个例:
•1 x 激光雷达;
•11 x 摄像头,含6 x 800万像素、4 x 200万像素环视、1 x 200万像素后视;
•1 x 毫米波雷达;
•12 x 超声波;
•2 x OrinX;
单OrinX的成本大概在400美元,单颗激光雷达的成本大概在500美元级。李想披露,理想带双OrinX的智驾方案成本约为4000美元,而特斯拉的仅为1500美元左右。
原特斯拉Autopilot Machine Learning Lead,现大卓智能CEO谷俊丽在接受采访时也谈到:「特斯拉造一台Model 3的BOM成本是16万,ADAS系统成本是7000块。」7000/16万,其占到总BOM成本的约4.4%。
综合来看,特斯拉FSD的成本大致在1万元人民币上下。
作为对比,华为ADS方案的代表车型问界M5后驱智驾版,跟M5后驱标准版差价2万元;小鹏G9的Pro和Max版,差价刚好也是2万元(因为Pro版带有一块OrinX,所以这个差价是单OrinX和双激光雷达的差价)。
李想认为,特斯拉FSD虽然只有144 Tops,但计算效率大约是GPU的3倍,所以实际跟双OrinX的性能是差不多的。
在数百万级的销量规模下,特斯拉把自研FSD的效率、成本优势发挥得淋漓尽致。
二. 自研芯片加纯视觉方案,特斯拉低算力的秘密
特斯拉FSD一大明显的技术差异是将纯视觉路线走到极致,去掉全部雷达。
•2021年5月开始不用毫米波雷达;
•2022年10月开始,所有为北美、欧洲、中东制造的Model 3和Model Y都不再配备超声波雷达;
•2023年起交付的Model X及Model S也不再配备超声波雷达。
在这点上,国内的理想也很大方地坦陈跟随特斯拉的路线,其中一个变化就是理想L9上由原来理想ONE时期的3个毫米波雷达配置减少为1个毫米波雷达。
回到FSD,其核心的感知能力是由Tesla Vision提供的,包括支持主动安全功能、Autopilot功能以及FSD Beta功能。
需要注意的是,特斯拉采用的摄像头为120万像素,而国内车企大多采用800万像素的高清摄像头。摄像头分辨率较低,也会比激光雷达以及高清摄像头的方案更节省算力,但对AI模型和算法精度会有更大的挑战。
去年10月的AI Day上,特斯拉稍稍对外展示了一下Vision是如何运作的:
第一步是系统将8个摄像头获取到的图像,生成一个类似于游戏引擎的实时3D画面——占据网络(Occupancy Network),对车辆周围场景进行复原;
第二步是给每个物体标注语义信息。特斯拉本身大规模地搭载会产生的海量数据,特斯拉还研发了自动标注(Autolabeling)工具,最后生成标注过的空间信息,得到一个矢量地图(Lanes Network),之后FSD就能使用这些信息来辅助导航。
毫末智行技术副总裁艾锐曾经分析表示,「特斯拉的自动驾驶感知采用的单模态,而不是多模态。核心原因它有数据自由和算力自由两个能力,把单模态的天花板极大地提升了。针对L2的产品来说,单模态足以给大家提供比较好的自动驾驶体验了,而且成本显然会更低。」
特斯拉Autopilot软件总监Ashok Elluswamy在领英上描述了这个团队的职责,其中大多数与海量数据的发掘利用有关:
•搭建大规模的真值生产线,利用海量、多元、高质量的数据,来训练神经网络;
•利用车队学习的方法,优化当前算法中脆弱、有缺陷的部分;
•利用机器学习和工程方法,来建立系统对地理环境和场景语义,准确、详实的理解;
在超大的数据规模下,对视觉算法的极限压榨,是特斯拉FSD公开的秘密。
三. 特斯拉的云端算力
自动驾驶落地需要两块核心芯片,一块是车端推理芯片,另一块是云端训练芯片。大多数时候,我们在谈论算力时,一般只提到车端推理芯片的算力,而忽略了云端。
上文毫末智行艾锐提到的「算力自由」,指的更多就是云端算力的自由(因为车端算力自由基本不太可能实现)。
2021年6月,在当时的CVPR上,时任特斯拉AI高级总监的Andrej Karpathy披露,特斯拉正在搭建一个超大规模的训练机群,将5760个英伟达A100以720个节点链接起来,总计算能力达到1.8 exaflops。
就AI算力排序,这可能是当时世界第五大超级计算机。
到当年底,英伟达汽车业务负责人Ali Kani披露,特斯拉已经采用了将近10000块英伟达GPU来建设L2+的基础设施。
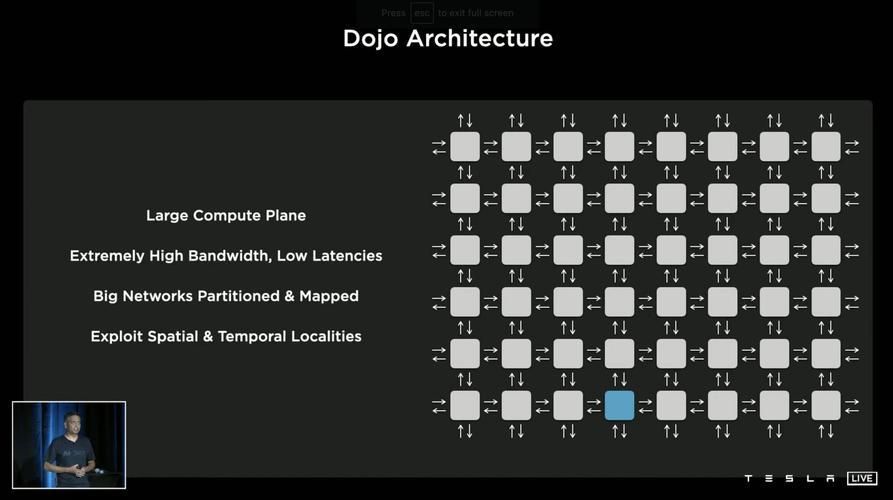
同一年,特斯拉发布了自研的云端训练芯片D1以及超级计算机Dojo。3000个D1芯片,构成120块训练块,再组成20个机柜,形成1个ExaPOD集群,这个集群的算力相当于1.09 EFLOPS。马斯克在当年的财报会上表示:自研D1芯片主要是出于成本、效率的考量,因为对特斯拉来说,英伟达的通用GPU不是效率最高的。
根据特斯拉的计划,Dojo应该已经在2022年投入运营使用。
纯视觉、低分辨率传感器,加上业界偏低的算力配置,通过自研芯片提高车端和云端的计算效率,通过超大规模的车队和数据量提升算法性能,特斯拉跑通了城市NOA在北美大规模开放的路径。
新的消息是,特斯拉很快将在国内开展FSD的路测。
FSD的下一步是HW4.0的升级(目前是HW3.0),有部分北美用户称其已交付的Model X上搭载了HW4.0。
(关于HW4.0的更多信息,也可参见我们此前的文章:HiEV洞察 | 特斯拉HW4.0再爆猛料,高精定位、雷达均有变动)
特斯拉将在今年推出Model 3的改款车型,项目代号Project Highland。目前已知Project Highland针对前脸、内饰、空间均有小幅的改良,HW4.0是否会在新款上搭载。
Model 3改款、HW4.0更新、FSD入华,能否将特斯拉推上新的高地。


















 795
795

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









