







前言:
重新整理以前的知识和文章发现,仍然有许多地方没有学得明白,懵懵懂懂含含糊糊的地方多如牛毛,尤其是到了真正实际写东西或者做项目时,如果不是系统的学习了知识,很容易遇到问题就卡壳,也想不到解决的思路。因此现在想从头到尾,从以前刚开始入门的角度再把永磁同步电机的矢量控制再撸一遍,把从电机本体的基础知识,FOC框架内的坐标变换、SVPWM、电流环与转速环PI参数设计、simulink仿真搭建、FOC的C代码实现,直到MTPA、弱磁和观测器类,都从头到尾的再整理一遍,如果时间充足的话,把一些深入点的参数辨识、低速带载性能提升、模型预测、效率优化等也撸一遍。这个过程会比较漫长,将会以笔记的形式在这里与大家分享讨论。
1 永磁同步电机的应用与概述
电机是一个集电、磁、机械、力、热等能量于一体的复杂物理实体,他的主要作用是将电能转化为机械能,产生驱动例句,作为电器或机械的动力源。电机的研究是一个多物理领域内的研究工作。电机的种类繁多,分类方法也是多种多样、分门别类。比较常见的分类如下图所示:
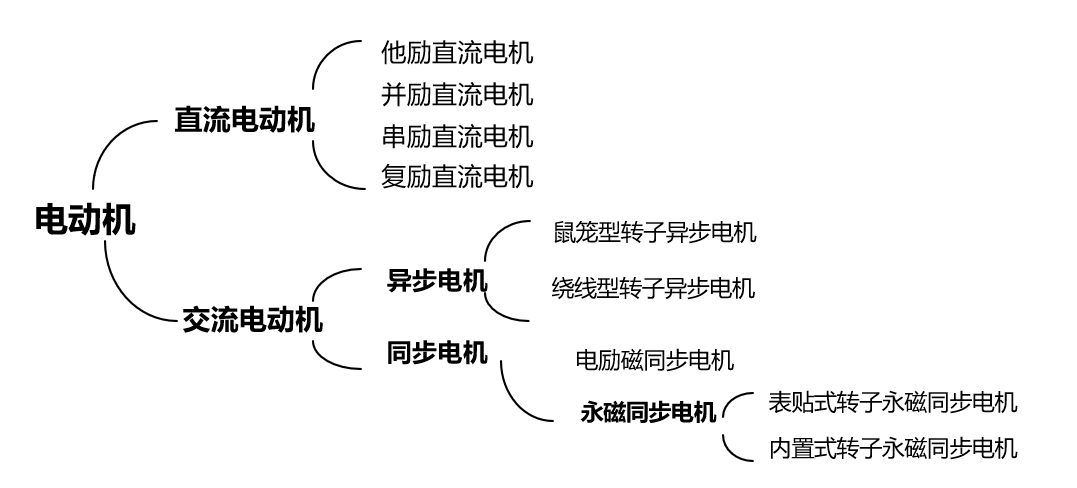
例如按照工作电源分类分为直流电动机和交流电动机,直流电动机按照励磁方式可被分为他励直流电动机、并励直流电动机、串励直流电动机等,其中交流电动机按照工作原理分为同步电动机和异步电动机,同步电机中有电励磁同步电机和永磁同步电机;因转子内永磁体安装结构不同可以将永磁同步电机分为表贴式转子永磁同步电机和内置式转子永磁同步电机。
永磁同步电机(Permanent Magnet Synchronous Motor,PMSM)最早出现于20世纪50年代中。永磁同步电机以永磁体励磁替代了电励磁绕组,这使得永磁同步电机相对电励磁同步电机的结构更为简单,因为不需要励磁电流提供磁场,没有励磁损耗,提高了电机的工作效率。早期针对永磁同步电机的研究主要集中在工频供电的永磁同步电机驱动控制,尤其是它的启直接启动特性。在没有开关器件只能工频供电时代,永磁同步电机是不具备自启动能力的,一般需要在转子上安装一个阻尼绕组,依靠阻尼绕组产生的异步转矩起动电机,再逐步切入由永磁体产生的力矩旋转至同步转速。一个重要的转折点是在20世纪后期,电力电子技术与芯片技术快速发展,以IGBT为代表的开关器件开始广泛应用于工业传动领域,以DSP为代表的高性能处理芯片登上历史舞台(1982年首枚DSP问世),这为永磁同步电机的交流变频调速系统提供了物质基础,由于变频器的存在,永磁同步电机自启动难的问题也逐渐被攻克。永磁同步电机天生具备的高效率特性,使其在电动汽车、新能源、伺服领域得到了大范围的应用。随着稀土行业的迅速发展,永磁同步电机的可靠性得到明显提升,造价也逐年降低,这些综合性的因素使得永磁同步电机逐渐成为电气传动领域的主流。
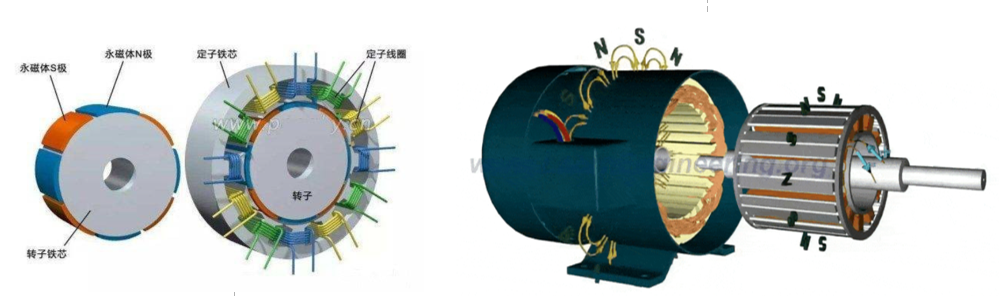
永磁同步电机的整体图

2 电机的机械结构
那就从零开始,从最本源的电机本体知识开始撸起。首当其冲的就是电机的机械结构,这其实是很多做算法设计工程师容易忽略的地方,很多控制算法的设计都是直接对电机的数学模型进行分析,但是如果在刚学习的时候,对机械结构有一定的认知和对实物进行一定的观察,这会对我们的控制对象有一个感官上的认知,这样学习起来就不会是空中楼阁,而是一个踏踏实实的铁疙瘩在你面前等着你控制。多个角度看一下:
2.1 永磁同步电机的纵切面图
电机的机壳内侧空间由电机定子绕组占据,定子绕组包裹的内腔为电机转子。相对来说,异步电机、同步电机和永磁同步电机的定子绕组结构上的区别并不大,永磁同步电机与励磁同步电机最大的区别就在于转子构成不同,电励磁同步电机的转子是由转子绕组+铁芯组成,而永磁同步电机的转子是永磁体+铁芯组成,转子上不同位置的极性是由永磁体的极性决定的,且不可改变。当定子绕组上通入交流电,由于通电绕组会产生磁场的物理特性,定子绕组侧会产生一个旋转磁场,由于转子由永磁体构成,则电机就会被定子绕组产生的磁动势带着旋转起来。
2.2 永磁同步电机的定子
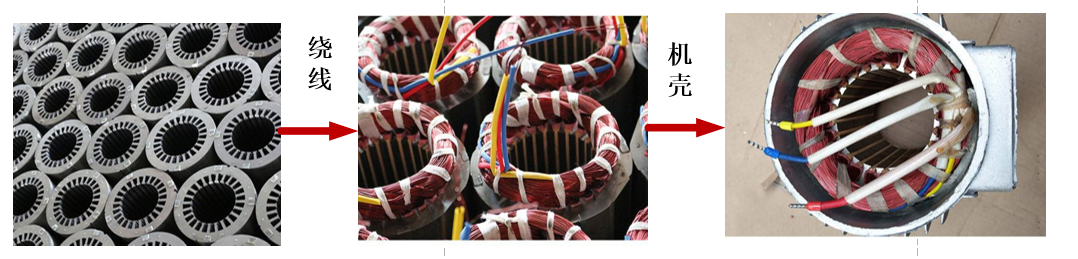
PMSM的定子主要是有定子绕组和定子铁心组成。一般采用表面绝缘的铜材料绕制成为多匝线圈,然后将线圈安装到合适的定子槽中,定子槽的结构如下第一张图所示,通过各种不同绝缘材料将绕组之间、绕组与铁心之间隔离开,绝缘材料一方面起到了绝缘作用,另一方面也起到了一定的线圈固定作用。最后通过将同一相绕组的线圈连接起来,然后将不同磁极下相同相的绕组线圈焊接在一起,从而构成一相绕组,如下第二张图所示,虽然定子槽有多个、绕组多个,但是最终电机线缆仍为UVW三相。
PMSM的定子绕组主要有分布式绕组与集中式绕组两种结构。经过查阅相关文献,发现结合以下两张图会更为直观一些,首先上图是分布式绕组与集中式绕组结构示意图,下图是电机定子的切面3D图。可以从如下两张图看出,分布式绕组的磁极线圈是相互部分利用铁心的结构,多个磁极线圈会共用相同的铁心,而集中式绕组则完全是一个磁极线圈就缠绕在自己独立的铁芯上,一个绕组只针对一个铁芯。
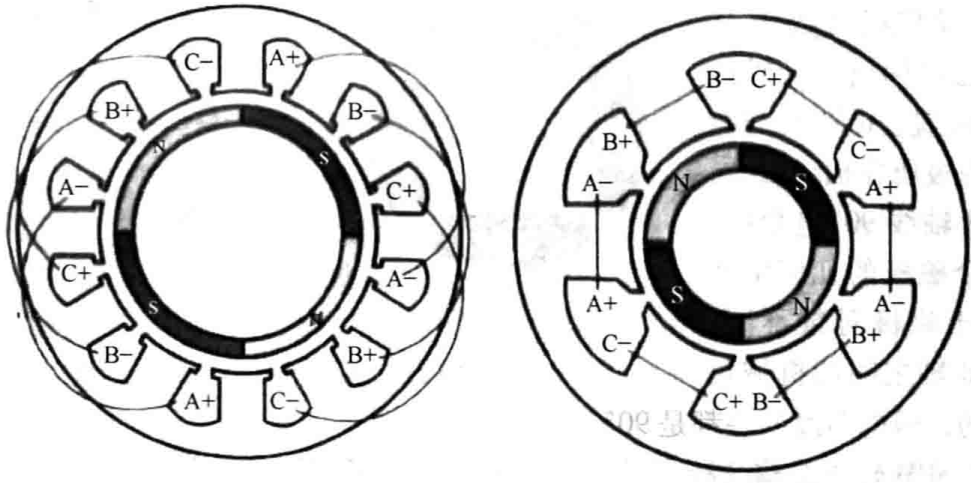
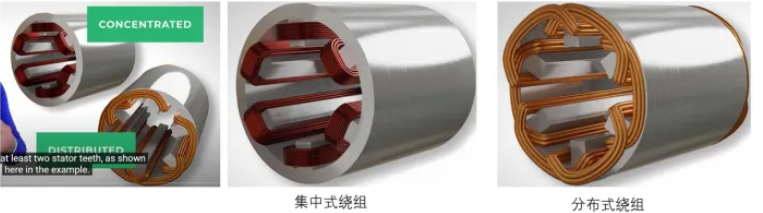
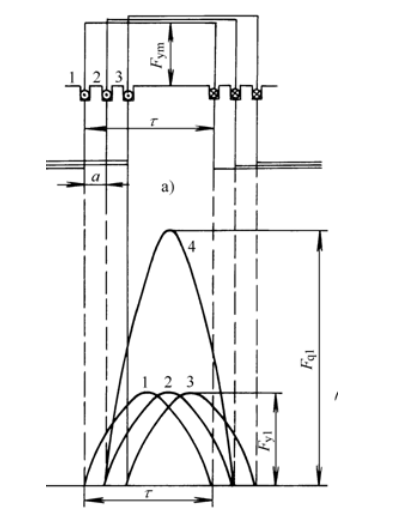
两种不同的绕组方式会带来不一样的电机特性,其中分布式绕组是将把集中在一起的线圈拆分开分布在不同的槽里面,这样会出现一个优势:每个线圈会自己产生各自的磁动势,而且他们各自的磁动势之间还有相位差,相位相差的磁动势会经过矢量叠加,这样会使得电机的输出谐波含量大大降低,如下图所示,图中上半部分的矩形波就是单个绕组线圈产生的磁动势,下半部分是对其进行了傅里叶分析提取了基波分量,整个图阐述了分布式绕组基波分量叠加的过程,经过详细的公式推导后得出的结论是分布式绕组对3次、5次谐波的削弱能够达到百分之九十,且能够不削弱基波幅值超过5%。这么做也会出现存在缺点:绕组的端部比较长,会导致电机的铜损显著增加;另外加工工艺相对复杂,造价较为昂贵。
集中式绕组的优缺点恰好与其对应,集中式绕组的优点是:1、端部较短,绕组端部的铜损可以显著减少,尤其是在电动机轴向长度很短时,其效果更加明显。2、工艺相对更为简单,结构更为紧凑,每个线圈仅绕在一个定子齿上,绕线简单自动化产线设计相对容易,所以造价方面会更低。集中式绕组的缺点:谐波相对分布式绕组的谐波要更大。因为刚好与分布式绕组相反,集中式绕组仅需要每个线圈会自己产生各自的磁动势,然后共同合成磁动势,不对绕组线圈进行拆分,相应的没有谐波抵消的过程,所以其磁动势谐波含量更高。
2.3 永磁同步电机的转子
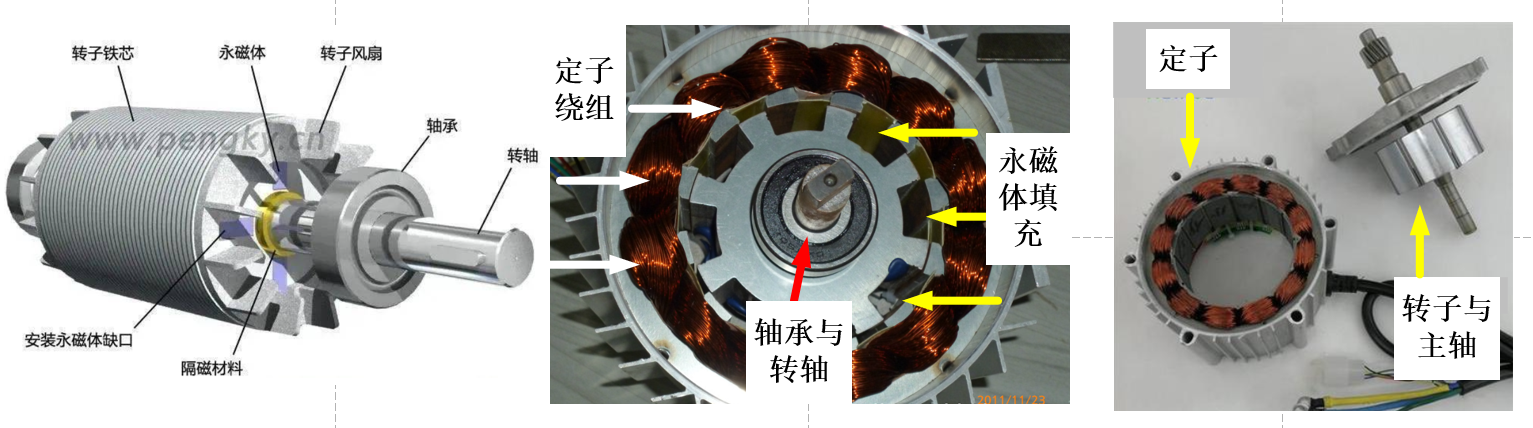
永磁同步电机特殊的转子是由表贴或内置的永磁体+转子铁心组成主体,内腔通过隔磁材料链接主转轴,并且外接轴承等机械结构执行驱动功能。这里有一个区分的点,就是有些转子的永磁体是内嵌在转子铁心中,而有些转子的永磁铁是贴在转子铁心,这是区别凸极永磁同步电机与隐极同步电机的关键点。假如把永磁同步电机拆开,其实物图就如下图所示,定子绕组与转子的分布非常的清晰,当我们在定子线圈中通入正弦电流产生旋转磁动势时,如果有一双眼睛能够从电机内部观察,那这个原理就更直观了。
永磁同步电机转子结构笔记:PMSM隐极电机与凸极电机的详细区别。
系列文章链接:
PMSM矢量控制笔记(1.2)——隐机电机与凸极电机的详细区别
写作不易,希望大家帮忙点个赞,一键三连哦~

















 489
489

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









