







 本文探讨了差速驱动的原理,通过分析控制命令与轨迹的关系,揭示了如何根据初始位置和速度差异计算执行命令后的机器人位置和朝向。介绍了如何利用Python进行模拟实践,详细阐述了轨迹计算过程。
本文探讨了差速驱动的原理,通过分析控制命令与轨迹的关系,揭示了如何根据初始位置和速度差异计算执行命令后的机器人位置和朝向。介绍了如何利用Python进行模拟实践,详细阐述了轨迹计算过程。
本文未经本人@Ai酱许可, [禁止转载]
差速驱动的原理就是:利用左轮和右轮的速度差异来旋转。它的控制命令是[左轮速度,右轮速度,持续时间]。下面这玩意平衡车就是典型的差速驱动。

(图片来自网络)
本文要解决的问题是:在已知控制命令,和机器人当前时刻的位置,朝向;我们如何求得执行完控制命令后机器人的位置和朝向?
博主先介绍了差速运动的轨迹与速度之间的联系,然后介绍如何求执行命令后机器人位置和朝向的理论,最后介绍了Python编程实践。
差速驱动的轨迹与速度之间的联系是什么?
直接看下面这张图,两个轮子速度不同会让机器人绕着某个点旋转,所以轨迹是一段圆弧。所以只要知道旋转半径R那就可以求得机器人执行命令后所在的位置,以及朝向。
%注意:旋转半径R是待求变量,其他变量都是已知。
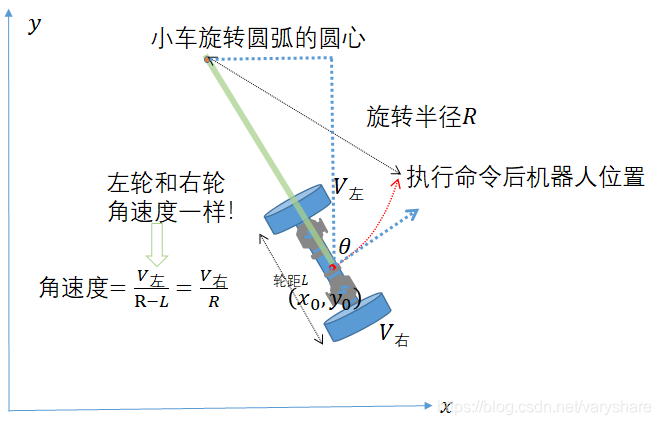
可以看到左轮速度和右轮速度不一样,它们之间差速会使得j机器人会作一个圆弧形旋转。而由于两个轮子都在同一个旋转半径上,所以角速度一样。虽然我们不知道旋转半径R是多少但是我们知道两个轮子的角速度一样,那么有下面这个等式。
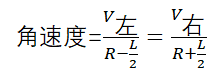
而上等式我们除了R不知道外,其他所有变量都是知道的。所以可以解出旋转半径R。
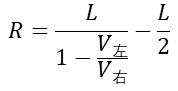
现在圆弧轨迹的旋转半径求出了那么旋转的轨迹,执行命令后的机器人位置和朝向都是已知的了。
我们现在已知执行命令前机器人位置为 ( x 0 , y 0 ) (x_0,y_0) (x<
 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章


















 640
640

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









