







两台设备,一个台式机(hostname是peng),另一个是虚拟机(hostname是jianwei),将台式机设成主机,虚拟机设成从机
1. 先确保两台设备都在同一个局域网
- 使用
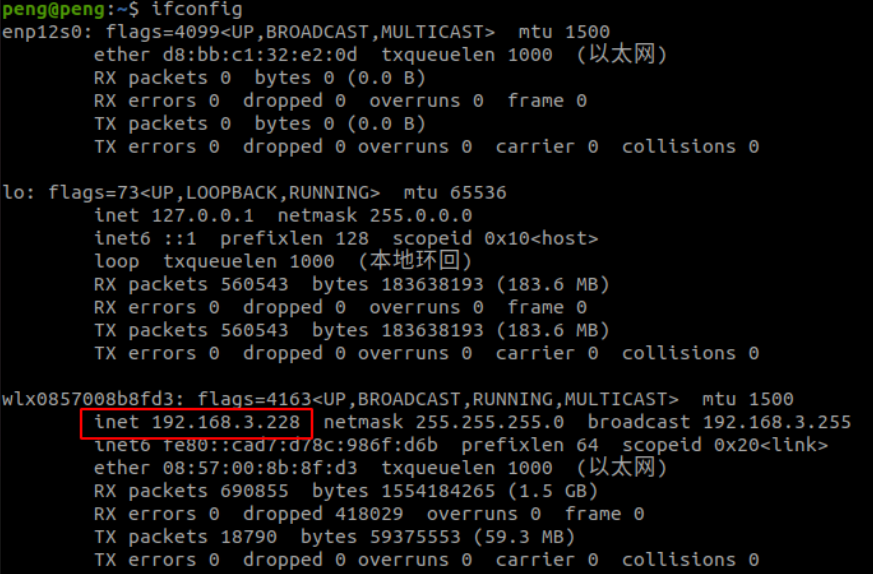
ifconfig查看两台设备在局域网下的IP地址
台式机:
虚拟机:
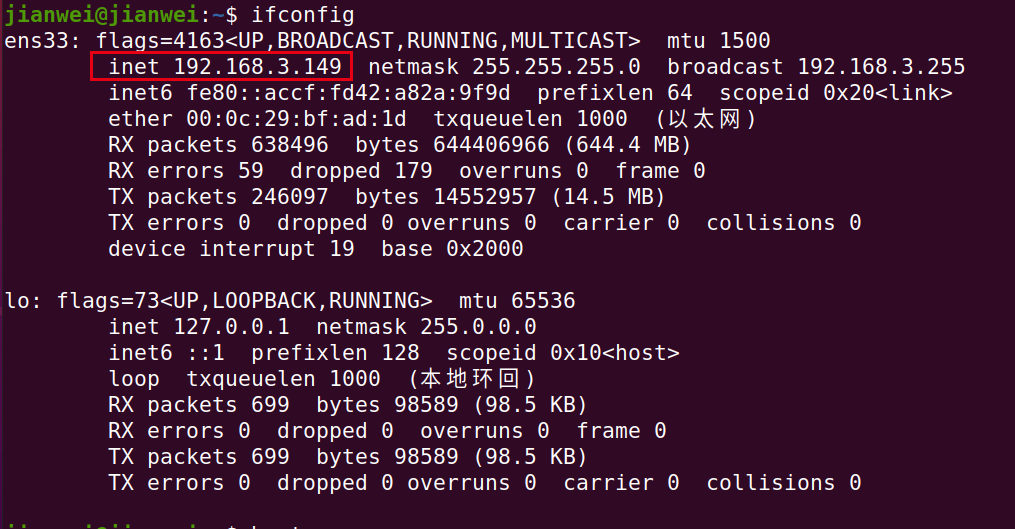
两台设备都在192.168.3段
2. 配置hosts文件
-
终端使用
hostname可以查看设备的计算机名称 -
分别在两台设备中打开hosts文件,加入对方的IP地址和对应的计算机名称
sudo gedit /etc/hosts
台式机的IP地址是:192.168.3.228,计算机名称是:peng,那么在虚拟机的hosts文件中添加如下内容:
192.168.3.228 peng
虚拟机的IP地址是:192.168.3.149,计算机名称是:jianwei,那么在台式机的hosts文件中添加如下内容:
192.168.3.149 jianwei
- 配置好之后可以相互ping一下,测试网络是否联通
在台式机上:

在虚拟机上:

从终端消息可以看出能相互ping,即hosts配置正确
3. 主从机IP配置
从机(虚拟机)要知道Master的位置(即主机的位置),那么就需要在从机中配置主机的IP,告诉从机主机在什么地方
在从机的~/.bashrc文件中设置主机IP
export ROS_MASTER_URI=http://peng:11311
保存退出后,终端执行:source ~/.bashrc
也可以直接在终端使用指令设置主机IP
echo "export ROS_MASTER_URI=http://peng:11311" >> /.bashrc
source ~/.bashrc
注意:修改了bashrc文件后一定要记得source一下
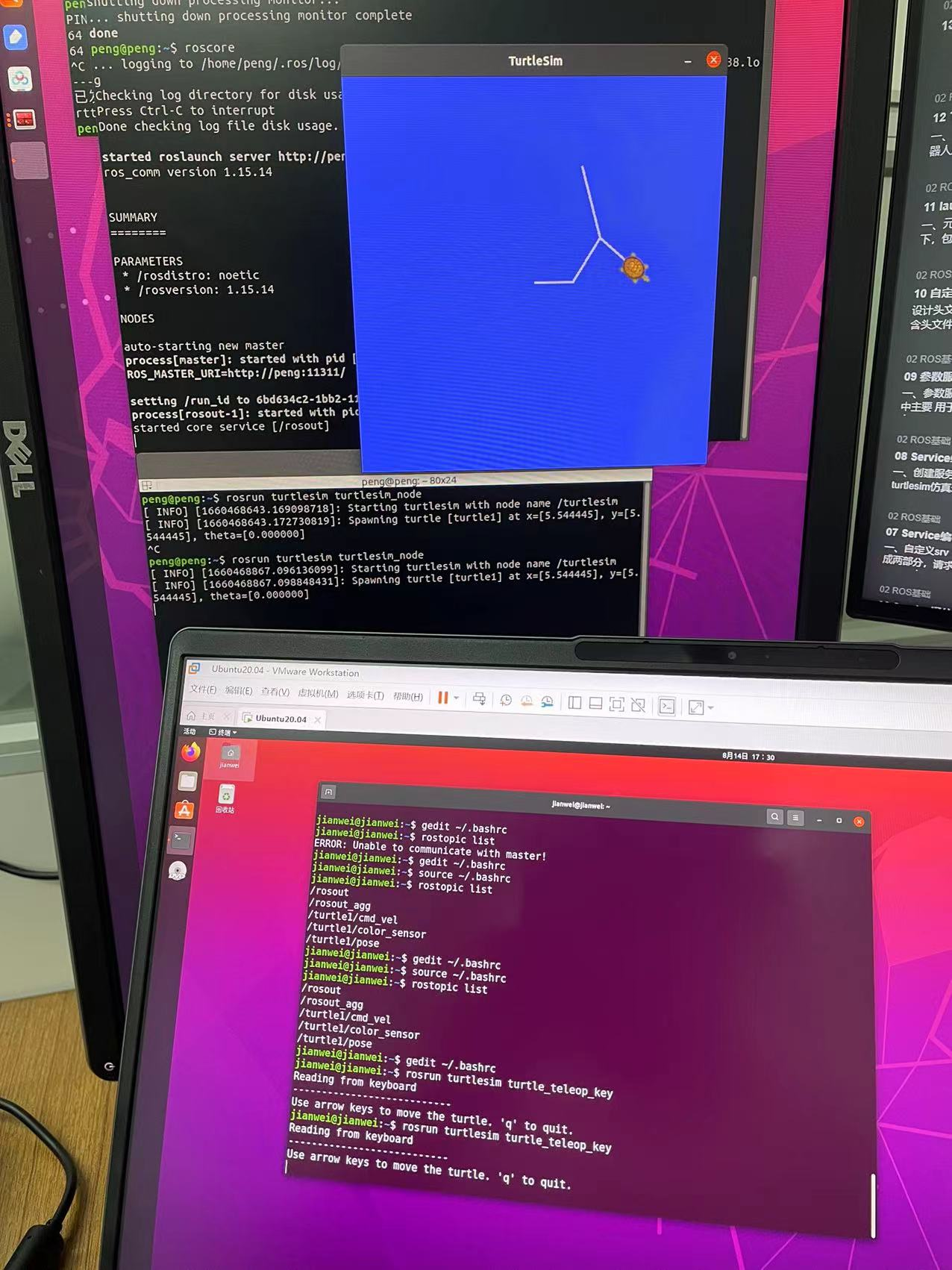
4. 主从机测试
在主机(台式机)上开启roscore,同时运行小乌龟rosrun turtlesim turtlesim_node
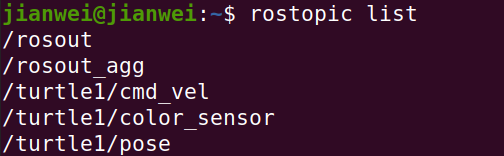
然后在从机(虚拟机)上可以查看topic
也可以在从机上运行键盘控制节点,实现在从机上控制主机上的小乌龟,rosrun turtlesim turtle_teleop_key


















 578
578

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









