







1.单片机系统
采用单片机系统来实现运动控制,成本较低,但开发难度较大,周期长。这种方案适应于产品批量较大、控制系统功能简单、有单片机开发经验的用户。
2.专业运动控制PLC
许多品牌的PLC都可选配定位控制模块,有些PLC的CPU单元本身就具有运动控制功能(例如松下FP0),这种方案一般适用于运动过程简单、运动轨迹固定的设备,如送料系统、自动焊机等。如若要修改少量运动参数,如速度、位移等,可与工业人机界面配合。
3.PC机和I/O卡
用I/O卡通过PC机也可以输出脉冲和方向信号来控制步进或伺服电机,但是所发脉冲只能通过软件编程,所以运动时发脉冲将占用PC机CPU大量的时间;另外,软件发脉冲受到微机定时器的限制,最大脉冲频率一般在100khz左右;再者,在Windows环境下由于其多任务机制,若没有深入windows内核机制进行底层编程来发脉冲,几乎不可能保证脉冲的均匀性。
4.PC机和PCI运动控制卡
PCI只需要从微机接收控制命令,然后自己完成运动控制:发脉冲/方向信号、检测限位等信号,几乎不占用微机CPU时间。
PCI运动控制卡详解
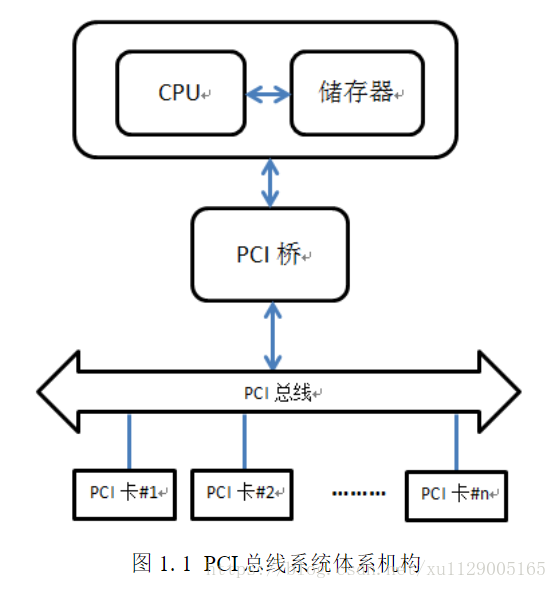
1.PCI总线的应用
2.PCI运动卡控制电机的实现方法:实物连线软件控制
通过PCI串口实现对直流电机闭环控制,PC机和PCI板卡作为上位机,通过直流无刷驱动器连接到电机,并通过Labview界面对转速进行实时监控调节。
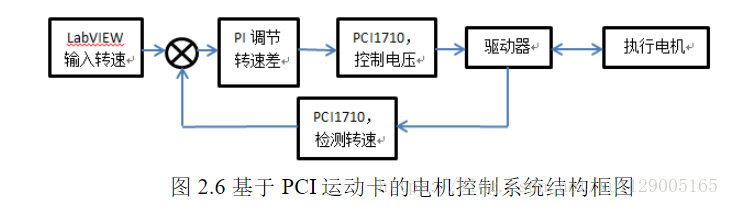
首先向PC机输入转速信号,在labview中通过直流电机的数学模型计算得到直流电机的控制电压,采用控制卡控制直流电机。同时采集卡采集电动机的转速信号,并反馈给计算机,与理论的控制转速比较得到转速差,通过labview中的数字PID程序进行转速调节,形成闭环。
3.硬件设计
首先向PC机输入转速信号,在labview中通过直流电机的数学模型计算得到直流电机的控制电压,采用控制卡控制直流电机。同时采集卡采集电动机的转速信号,并反馈给计算机,与理论的控制转速比较得到转速差,通过labview中的数字PID程序进行转速调节,形成闭环。

- 数据采集卡
研华科技PCI-1710,12位A/D转换、D/A转换,数字量输入、数字量输出及计数器/定时 - 接线端子卡
与采集卡配套的ADAM-3968-AE型DIN导轨安装的68脚SCSI-II接线端子,PCI的针脚和接线端子一一对应,可通过将输入信号连接到接线端子测试PCI管脚。















 2万+
2万+











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









