







 该博客详细介绍了包含多种天气条件和污染情况的数据集,目标物体距离分布偏态,主要集中在15~30m。不同目标在不同距离的分布有明显差异,车辆在远处更易识别。点云传感器如LiDAR和Radar的检测距离对比显示,Radar的感知距离更远,但点云密度较低。此外,还分析了目标在不同角度和距离的分布情况,以及各类目标的激光雷达点云投影特征。
该博客详细介绍了包含多种天气条件和污染情况的数据集,目标物体距离分布偏态,主要集中在15~30m。不同目标在不同距离的分布有明显差异,车辆在远处更易识别。点云传感器如LiDAR和Radar的检测距离对比显示,Radar的感知距离更远,但点云密度较低。此外,还分析了目标在不同角度和距离的分布情况,以及各类目标的激光雷达点云投影特征。
场景

数据集除晴天、多云等可见度较高的天气,还增加了夜晚、雨、雾等低可见度天气的场景,其中部分摄像头收到雨滴等污染。
目标距离
关于已标注目标的距离分布统计,官网并没有给出,但是在数据集论文中给出了详细的介绍:
- radial distance(径向距离)
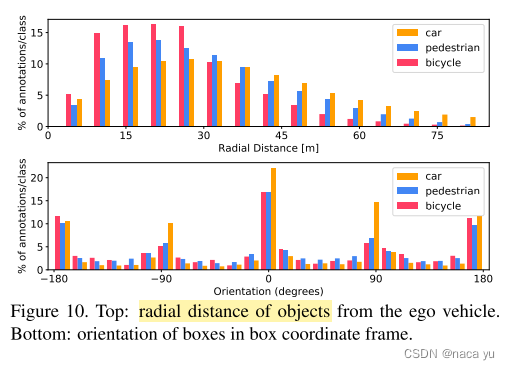
- 由上图得,目标物体分布整体呈偏态分布,主要分布在15~30m的中间距离段内,在近处和远处的分布相比较少;
- 不同距离分布的三种主要目标所占比例接近,在近处主要以自行车等小目标为主,在远处以汽车这类较好标注的大型目标为主;
- 三个主要目标种类之间的朝向大致相同,主要是-180,-90,0,90,180度为主,其他朝向的所占比例较少,因为行驶中的车辆在道路上主要也分为同向,逆向,转向这几种;
- Polar density map
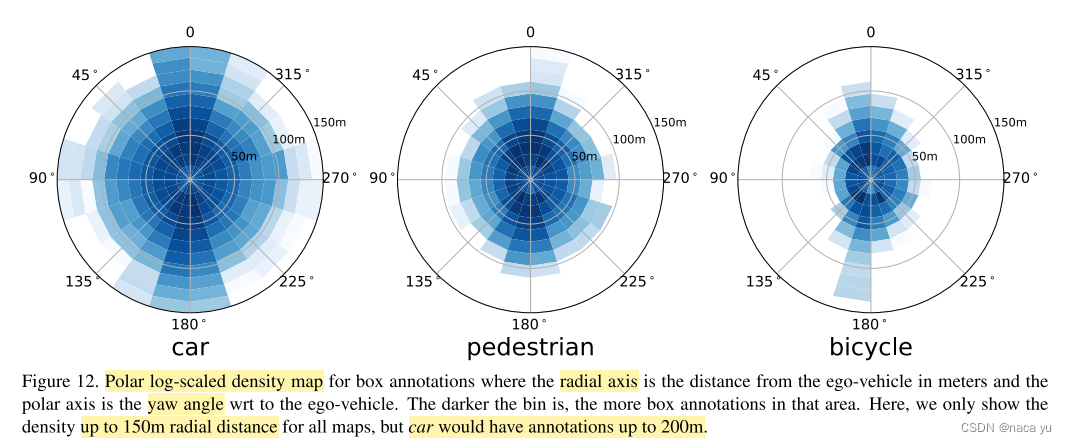
- 根据上图,基本得出:
- 首先是目标分布角度,分布在正前、后角度的目标较多,其次是正左、右部分;
- 其次是不同的种类范围,小目标例如人、自行车等分布在0-100的范围内,车分布在0-150m不等的距离中,车辆的标注在150-200m的范围内仍然存在。
- Hexbin density map
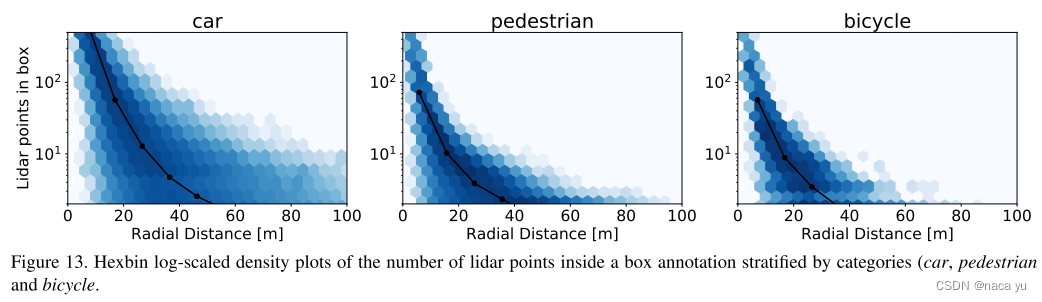
- 由上图得激光雷达点在一定距离内的目标上投影的数量分布:
- Hexbin统计图反映出了不同种类和同种种类的目标框所被投射到的点云数量分布
- 三种主要的目标种类,种类对应的投影点随着距离增加而下降,在最近处达到上千个投影点,但是在远处100m处自行车上的投影点没有激光雷达点云的投影。
- 汽车作为最重要的检测目标,其被投影的点云在80m左右处下降到十位数的数量级。
- 整体上,点云呈现近多远少的规律,也符合正常的认知逻辑,其中包括激光雷达的传感器本身的点云就服从近多远少的分布,加上前景物体在近处所占的比例也较大。
- 各传感器的检测距离

- LiDAR在100米左右截断,这里猜测是传感器本身的设计问题,设定了感知距离上限,激光雷达本身的检测距离少于毫米波雷达但是不止100m;
- Radar在200m时仍然有点云存在,可以看出Radar传感器感知距离远的优势,但是其相比lidar点云的数量,大概是几十倍的关系,其点云分布从0m的数十个点,到140m左右开始仅有个位数。


















 1万+
1万+

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











