







 本文详细解读了SAE对自动驾驶的六个等级划分,强调了功能与等级之间的区别,并介绍了整车自动驾驶系统的架构,包括定位、感知、预测、规划和控制模块。同时概述了规控系统(PNC)的关键组件及其作用。
本文详细解读了SAE对自动驾驶的六个等级划分,强调了功能与等级之间的区别,并介绍了整车自动驾驶系统的架构,包括定位、感知、预测、规划和控制模块。同时概述了规控系统(PNC)的关键组件及其作用。
1.1 自动驾驶的分级
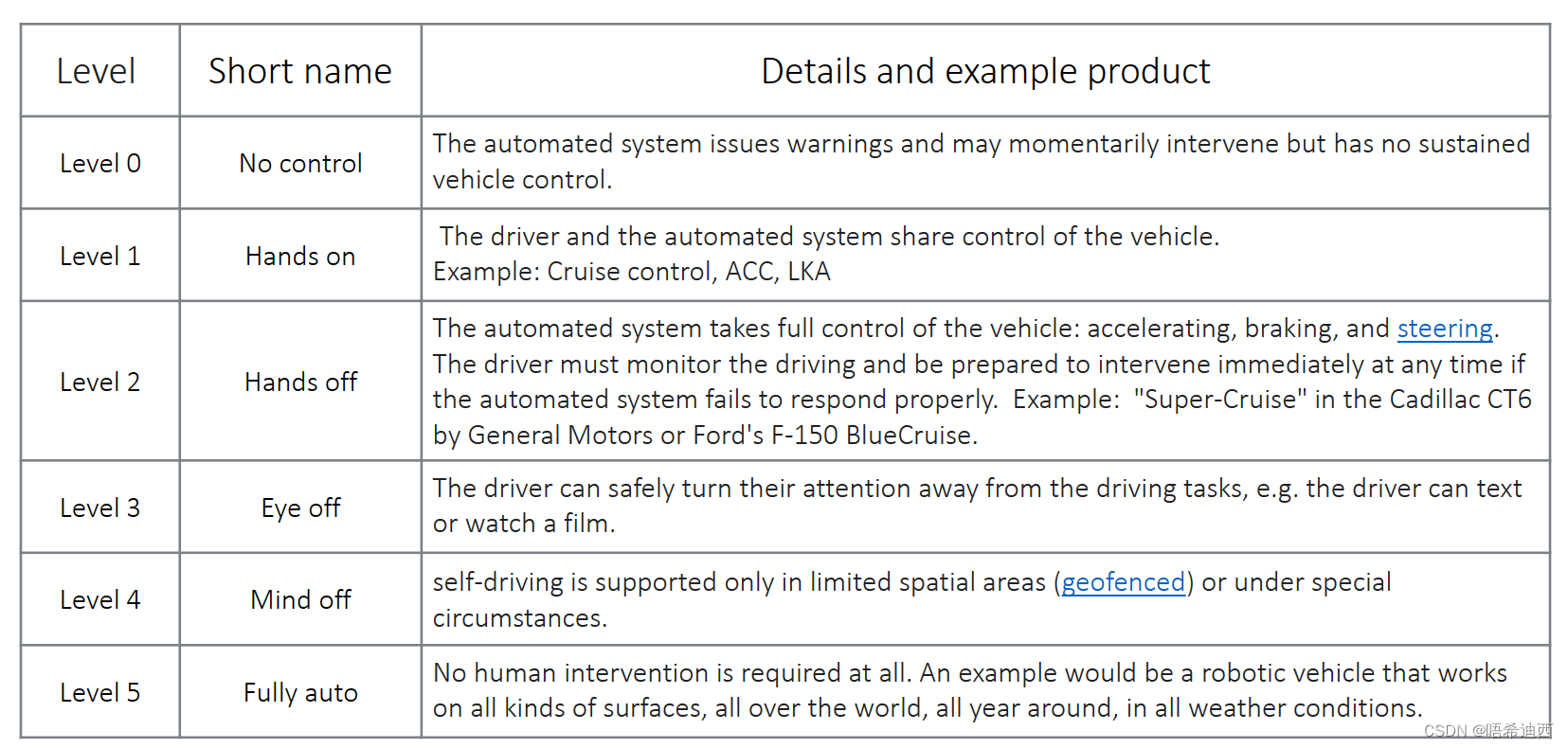
2014年美国汽车工程师学会 (SAE) 定义了6个无人驾驶等级,从0级(完全手动)到5级(完全自动),这些无人驾驶等级准则已经被美国交通部采纳;该标准也被称为SAE标准;

- 严格意义上说,相关的自动驾驶功能和整车的自动驾驶等级,并不能直接画上等号;比如整车具有某项L3级别的功能,但并不代表整车就是一个L3级的自动驾驶车辆;
- 有一些功能可以横跨几个自动驾驶等级;例如自动泊车功能,如果实现的仅是常规的自动泊车(APA),那这只是一个L2级别的功能;而远程的遥控泊车(RPA -- Remote Parking Automation)功能或者记忆泊车功能,这些属于L3级别;如果是自主的代客泊车,就是L4级别的功能了;
简单总结:
- L0:【人工驾驶】由人类驾驶员负责驾驶车辆;
- L1:【辅助驾驶】车辆对方向盘和加减速中的一项操作提供驾驶,人类驾驶员负责其余的驾驶动作;
- L2:【部分自动驾驶】车辆对方向盘和加减速中的多项操作提供驾驶支持,人类驾驶员负责其余驾驶操作;
- L3:【条件自动驾驶】具有了完整的环境检测能力,车辆完成绝大部分驾驶操作,人类驾驶员需要在适当的时候提供应答(在系统无法执行任务的时候进行手动接管);
- L4:【高度自动驾驶】由车辆完成所有驾驶操作,人类驾驶员无需对所有的系统请求做出应答,但限定道路和环境条件(ODD -- Operational Design Domain)下进行;(如果系统发生意外/失效,4级的自动驾驶汽车可以自动进行干预和恢复);
- L5:【完全自动驾驶】由车辆完成所有驾驶操作,人类驾驶员无需保持注意力;
a
a
a
a
1.2 整车自动驾驶系统的架构

- 定位模块(Localization):定位车辆位置;
- 高精地图模块(Maps):普通的地图只需要记录道路级别的数据,如形状/坡度/方向.....;但是高精地图还要记录车道类型/宽度/护栏位置/交通指示牌/信号灯......;
- 感知模块(Perception):对周围三维世界的重建;
- 预测模块(Prediction):分析/预测周围环境中的交通参与者的运动模式和运动轨迹,来辅助自动驾驶汽车能够做出合理的决策;
- 规划模块(Planning):局部规划 + 全局规划;
- 控制模块(Control):控制车辆硬件,如刹车/油门.....;
a
a
a
a
1.3 规控系统(PNC)的架构


- Route Planning:全局路径规划(基于搜索 / 基于采样)
- Decision Making / Behavior Planner:车辆行为决策(搜集所有的信息,决定无人车的行驶策略,给出一个宏观的指令,如超车/跟车/换道.....,输出给下游模块进行局部路径规划)
- Motion Planning / Local Planner:局部路径规划(轨迹规划 + 速度规划)
- Motion Control:车辆控制















 1459
1459

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









