




 文章介绍了如何在ROS的move_base包中更换全局路径规划算法A*或Dijkstra,以及局部路径规划算法DWA。通过修改move_base.launch文件和planner_core.cpp文件的参数,可以实现算法的切换。同时,文章提到了可能出现的问题,如路径规划的非最优性、机器人的运动方向等,并给出了相应的解决策略。
文章介绍了如何在ROS的move_base包中更换全局路径规划算法A*或Dijkstra,以及局部路径规划算法DWA。通过修改move_base.launch文件和planner_core.cpp文件的参数,可以实现算法的切换。同时,文章提到了可能出现的问题,如路径规划的非最优性、机器人的运动方向等,并给出了相应的解决策略。
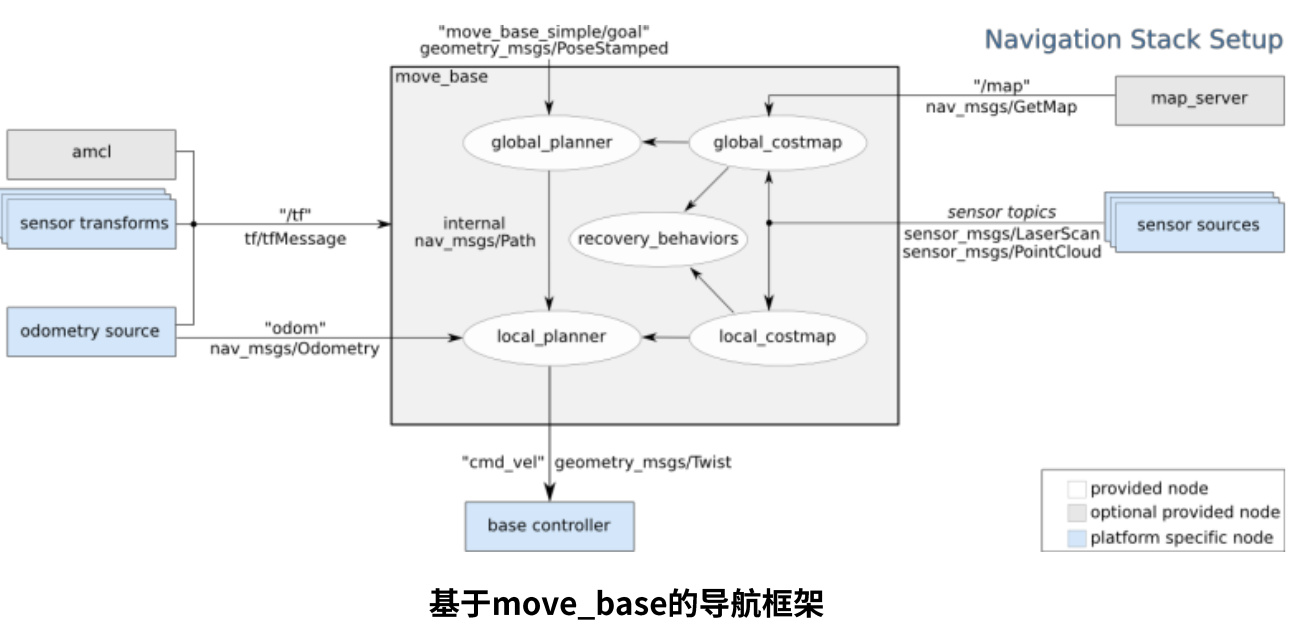
前提:需要安装navigation包,才可以运行move_base。
move_base包默认算法:
- 全局路径规划:Dijkstra;
- 局部路径规划:航迹推算;
一.move_base路径规划包内容
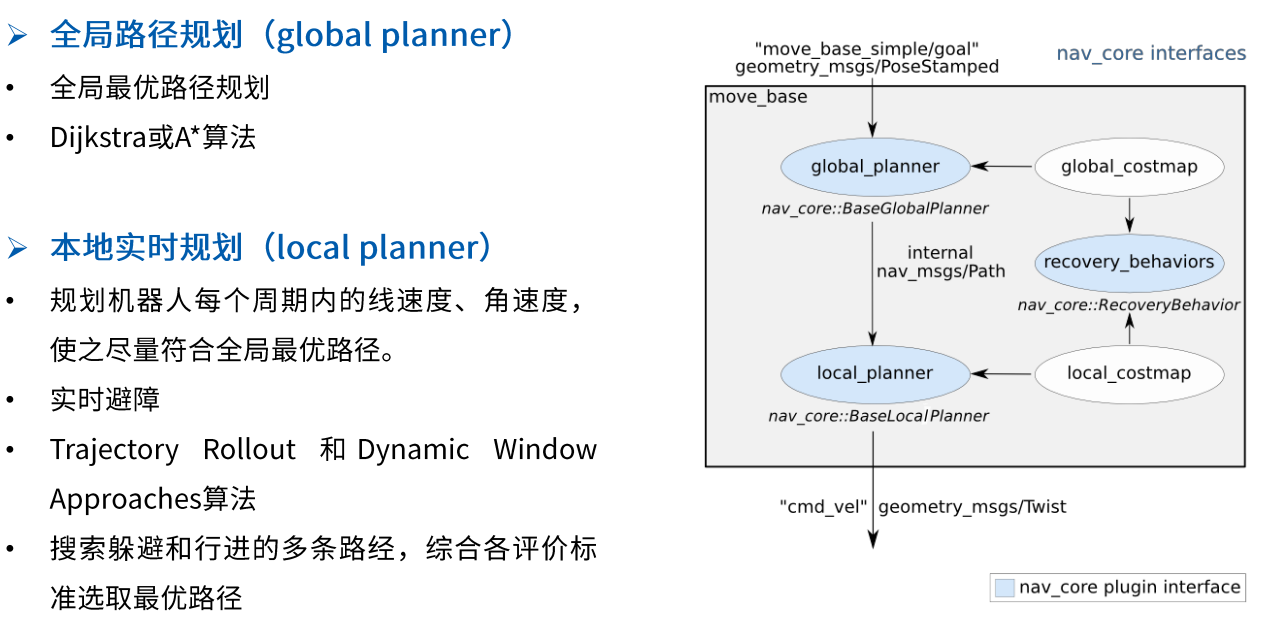

二.更换全局路径规划算法(A*、Dijkstra、DWA)
A*、Dijkstra属于全局路径规划、DWA属于局部路径规划。
1、move_base.launch
move_base.launch文件需要添加以下内容:
<!--加载A star、Dijkstra算法-->
<param name="base_global_planner" value="global_planner/GlobalPlanner"/>
<param name="planner_frequency" value="1.0" />
<p 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章


















 2566
2566










 到【灌水乐园】发言
到【灌水乐园】发言







