






环境设置
Isaac Sim 基于 NVIDIA Omniverse 构建,使用 Omniverse Kit 中提供的工具。Omniverse Kit 带有默认 UI,该 UI 允许您轻松编辑 USD 阶段。在本教程中,您将学习在 USD 舞台上设置环境、添加和编辑简单对象及其属性的基本步骤。 装配带有关节和铰接的刚体,并添加摄像头和传感器。 目标是培养您在导航 Isaac Sim 方面的基本技能,熟悉常用术语,并使用 GUI 构建环境和设置您的机器人。
学习目标
本教程教您使用 Isaac Sim GUI 中提供的工具构建支持物理的虚拟世界,包括:
-
设置全局舞台属性
-
设置全局物理属性
-
添加接地平面
-
添加照明
开始
先决条件
-
在开始本教程之前,请完成 Isaac Sim Interface 教程。译至isaac sim 教程(一)-CSDN博客
要从一个干净的 Isaac Sim 阶段开始,请转到“文件”菜单,然后单击“新建”。 提供的阶段具有默认的 Xform 和 .两者都可以在左侧的舞台树的舞台标签下找到。WorlddefaultLight
设置舞台属性
在向舞台添加任何内容之前,请验证当前舞台属性设置是否与预期的约定匹配。
-
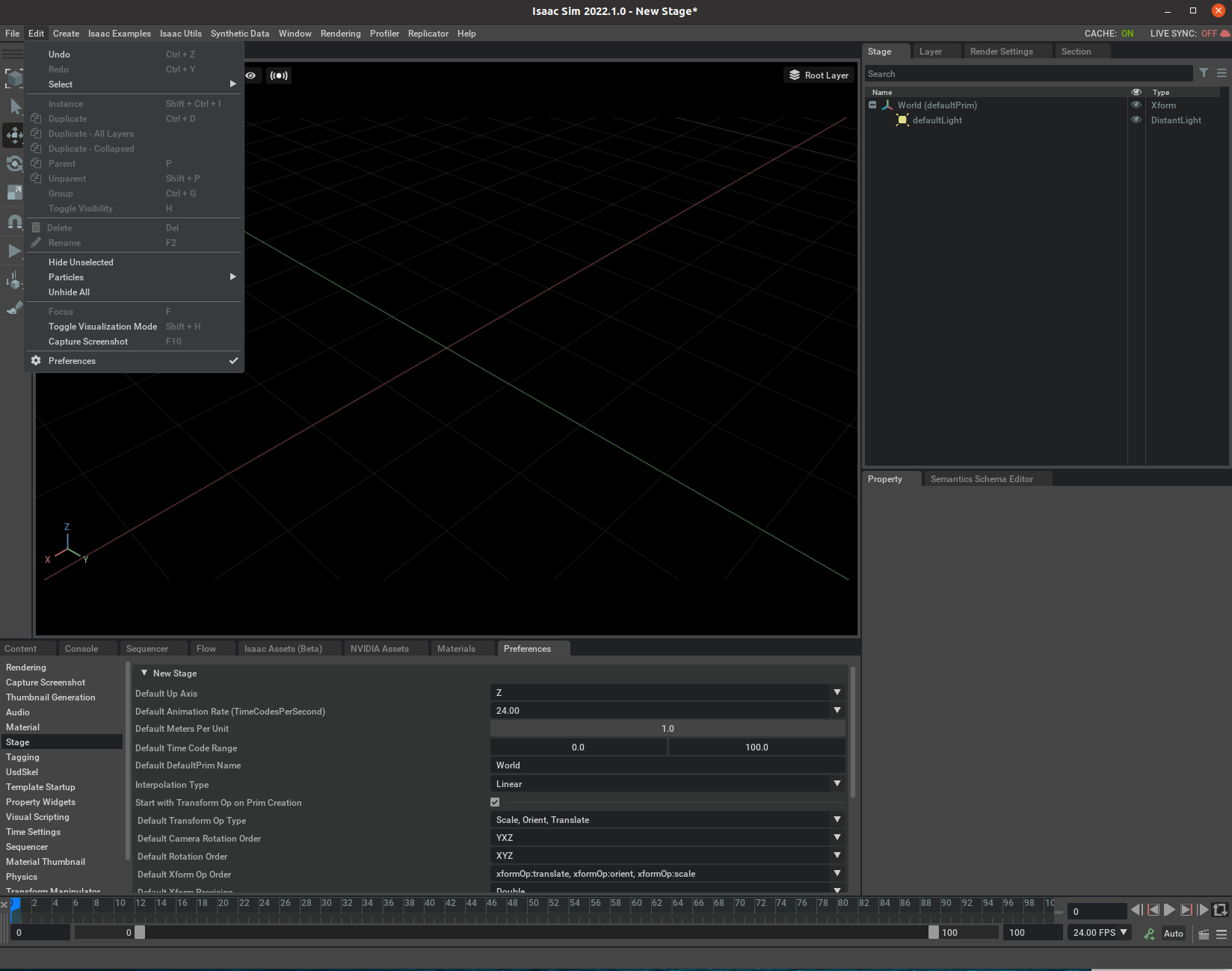
转到“ Edit > Preferences以打开“首选项”面板。
-
浏览 Omniverse Kit 中的多种类型的设置,这些设置在面板左侧的列中按类别分组。
-
从左列中选择“Stage ”,并查看属性,例如:
-
确定 Up 的轴。Isaac Sim 中的默认值为 Z。如果您的资源是在具有不同上升轴的程序中创建的,则会导致您的资源被旋转导入。
-
舞台单元。2022.1 之前的 Isaac Sim 版本具有以厘米为单位的舞台单位,但现在默认为米。但是,Omniverse Kit 的默认单位仍以厘米为单位。
如果您看到USD似乎相差 100 倍,请记住这一点。
-
默认旋转顺序。默认值设置为在 X 上执行旋转,然后在 Y 上执行旋转,最后在 Z 上执行旋转。
-
创建物理场景
要添加物理场景以模拟真实世界的物理,包括重力和物理时间步长,请执行以下操作:
-
转到菜单栏,然后单击创建>物理>物理场景。
-
验证 PhysicsScene 是否已添加到舞台树中。
-
单击它以检查其属性。 您可以看到重力设置为指向 -Z 方向,大小为 9.8,这提醒您默认的长度单位是米。
除非您正在模拟数百个刚体和机器人,否则使用 CPU 求解器而不是 GPU 会更有效,因此,出于本教程的目的:
-
禁用 GPU 动态,并在 Physics Scene 的 Property 选项卡中使用 MBP Broadphase。
isaac sim 2-1
添加接地平面
接地平面可防止任何物理启用的对象掉落到其下方。 即使设置的平面在每个方向上只能看到最多 25 米,地面平面的碰撞属性也会无限延伸。
要向虚拟环境添加接地平面:
-
转到顶部菜单栏,然后单击 Create > Physics > Ground Plane。
-
打开网格,使接地平面更易于查看:
isaac2-2
照明
每个新阶段都预先填充了一个 - 否则您将看不到任何东西。defaultLight
要创建其他聚光灯,请执行以下操作:
-
如果还没有接地平面,请添加一个接地平面,这样我们就可以看到光的反射。>地平面创建>物理。
-
转到Create > Light > Sphere Light。
-
通过向上移动 7 个单位将其向上移动并面朝下转动,并使 X 轴和 Y 轴上的旋转无效。
-
在“属性”选项卡中,通过单击颜色条>选择您选择的颜色来更改其在“主要颜色”中的颜色。
-
将其强度 Main > Intensity 更改为 1e6;主>半径为 0.05,将 Shaping -> cone:angle 中的光斑范围限制为 45 度,并将 Shaping -> cone:soft ness 中的聚光灯边缘柔化为 0.05。
-
为了使新的聚光灯更易于查看,我们将通过转到其属性选项卡并将主>强度设置为 300 来降低默认光源的强度。
isaac2-3
总结
本教程开始执行必要的步骤,以创建适合物理模拟和测试 Isaac Sim 的虚拟世界。 涵盖以下主题:
-
添加地平面、照明和物理场景。
后续步骤
继续阅读添加简单对象,了解如何向 Isaac Sim 添加简单对象并编辑其属性。
进一步学习
如需更深入和富有创意的世界构建工具,请参阅我们的姊妹 Omniverse 工具 Composer。

















 1266
1266

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









