







录制前需设置文件主要有两个
文件一:catkin_zed/src/zed-ros-wrapper-3.8.x/zed_wrapper/params/common.yaml
# params/common.yaml
# Common parameters to Stereolabs ZED and ZED mini cameras
---
# Dynamic parameters cannot have a namespace
brightness: 4 # Dynamic
contrast: 4 # Dynamic
hue: 0 # Dynamic
saturation: 4 # Dynamic
sharpness: 4 # Dynamic
gamma: 8 # Dynamic - Requires SDK >=v3.1
auto_exposure_gain: true # Dynamic
#自动曝光,如果想全局一致可以关掉
gain: 100 # Dynamic - works only if `auto_exposure_gain` is false
exposure: 100 # Dynamic - works only if `auto_exposure_gain` is false
auto_whitebalance: true # Dynamic
whitebalance_temperature: 42 # Dynamic - works only if `auto_whitebalance` is false
depth_confidence: 30 # Dynamic
depth_texture_conf: 100 # Dynamic
pub_frame_rate: 10.0 # Dynamic - frequency of publishing of video and depth data
#数据发布频率
point_cloud_freq: 10.0 # Dynamic - frequency of the pointcloud publishing (equal or less to `grab_frame_rate` value)
general:
camera_name: zed # A name for the camera (can be different from camera model and node name and can be overwritten by the launch file)
zed_id: 0
serial_number: 0
resolution: 2 # '0': HD2K, '1': HD1080, '2': HD720, '3': VGA
grab_frame_rate: 10 # Frequency of frame grabbing for internal SDK operations
#彩色图像抓取频率
gpu_id: -1
base_frame: 'base_link' # must be equal to the frame_id used in the URDF file
verbose: false # Enable info message by the ZED SDK
svo_compression: 2 # `0`: LOSSLESS, `1`: AVCHD, `2`: HEVC
self_calib: true # enable/disable self calibration at starting
camera_flip: false
video:
img_downsample_factor: 0.5 # Resample factor for images [0.01,1.0] The SDK works with native image sizes, but publishes rescaled image.缩放因子,例如0.5会缩小图像长宽各一半
#缩放因子,按比例调节图像分辨率
extrinsic_in_camera_frame: true # if `false` extrinsic parameter in `camera_info` will use ROS native frame (X FORWARD, Z UP) instead of the camera frame (Z FORWARD, Y DOWN) [`true` use old behavior as for version < v3.1]
depth:
quality: 3 # '0': NONE, '1': PERFORMANCE, '2': QUALITY, '3': ULTRA, '4': NEURAL
#控制深度图的质量级别。'0': NONE:不生成深度图。'1': PERFORMANCE:优先性能的深度图生成模式,适用于需要较高帧率的应用。'2': QUALITY':优先质量的深度图生成模式,适用于需要更准确深度信息的应用,但可能降低帧率。'3': ULTRA':最高质量的深度图生成模式,提供最好的深度信息,但要求高计算能力。'4': NEURAL':使用神经网络增强的深度图生成模式,旨在提供更准确和详细的深度信息。
sensing_mode: 0 # '0': STANDARD, '1': FILL (not use FILL for robotic applications)
depth_stabilization: 1 # `0`: disabled, `1`: enabled
openni_depth_mode: false # 'false': 32bit float meters, 'true': 16bit uchar millimeters
#更高精度的深度图,但是解码时也要调整格式为32UC1
depth_downsample_factor: 0.5 # Resample factor for depth data matrices [0.01,1.0] The SDK works with native data sizes, but publishes rescaled matrices (depth map, point cloud, ...)
pos_tracking:
pos_tracking_enabled: false # True to enable positional tracking from start
#关闭,录制用不到
publish_tf: true # publish `odom -> base_link` TF
publish_map_tf: true # publish `map -> odom` TF
map_frame: 'map' # main frame
odometry_frame: 'odom' # odometry frame
area_memory_db_path: 'zed_area_memory.area' # file loaded when the node starts to restore the "known visual features" map.
save_area_memory_db_on_exit: false # save the "known visual features" map when the node is correctly closed to the path indicated by `area_memory_db_path`
area_memory: true # Enable to detect loop closure
floor_alignment: false # Enable to automatically calculate camera/floor offset
initial_base_pose: [0.0,0.0,0.0, 0.0,0.0,0.0] # Initial position of the `base_frame` -> [X, Y, Z, R, P, Y]
init_odom_with_first_valid_pose: true # Enable to initialize the odometry with the first valid pose
path_pub_rate: 2.0 # Camera trajectory publishing frequency
path_max_count: -1 # use '-1' for unlimited path size
two_d_mode: false # Force navigation on a plane. If true the Z value will be fixed to "fixed_z_value", roll and pitch to zero
fixed_z_value: 0.00 # Value to be used for Z coordinate if `two_d_mode` is true
mapping:
mapping_enabled: false # True to enable mapping and fused point cloud publication
#关闭,录制用不到
resolution: 0.05 # maps resolution in meters [0.01f, 0.2f]
max_mapping_range: -1 # maximum depth range while mapping in meters (-1 for automatic calculation) [2.0, 20.0]
fused_pointcloud_freq: 1.0 # frequency of the publishing of the fused colored point cloud
clicked_point_topic: '/clicked_point' # Topic published by Rviz when a point of the cloud is clicked. Used for plane detection文件2:
catkin_zed/src/zed-ros-wrapper-3.8.x/zed_wrapper/params/zed2i.yaml
# params/zed2i.yaml
# Parameters for Stereolabs ZED2 camera
---
general:
camera_model: 'zed2i'
depth:
min_depth: 0.7 # Min: 0.2, Max: 3.0 - Default 0.7 - Note: reducing this value wil require more computational power and GPU memory
#最小深度
max_depth: 10.0 # Max: 40.0
#最大深度
pos_tracking:
imu_fusion: true # enable/disable IMU fusion. When set to false, only the optical odometry will be used.
sensors:
sensors_timestamp_sync: false # Synchronize Sensors messages timestamp with latest received frame 不能开,开会极大降低IMU频率
max_pub_rate: 300. # max frequency of publishing of sensors data. MAX: 400. - MIN: grab rate imu的频率,开到400实际值会在360附近
#imu的频率
publish_imu_tf: true # publish `IMU -> <cam_name>_left_camera_frame` TF
object_detection:
od_enabled: false # True to enable Object Detection [not available for ZED]
#录制用不到,关闭
model: 0 # '0': MULTI_CLASS_BOX - '1': MULTI_CLASS_BOX_ACCURATE - '2': HUMAN_BODY_FAST - '3': HUMAN_BODY_ACCURATE - '4': MULTI_CLASS_BOX_MEDIUM - '5': HUMAN_BODY_MEDIUM - '6': PERSON_HEAD_BOX
confidence_threshold: 50 # Minimum value of the detection confidence of an object [0,100]
max_range: 15. # Maximum detection range
object_tracking_enabled: true # Enable/disable the tracking of the detected objects
body_fitting: false # Enable/disable body fitting for 'HUMAN_BODY_X' models
mc_people: true # Enable/disable the detection of persons for 'MULTI_CLASS_BOX_X' models
mc_vehicle: true # Enable/disable the detection of vehicles for 'MULTI_CLASS_BOX_X' models
mc_bag: true # Enable/disable the detection of bags for 'MULTI_CLASS_BOX_X' models
mc_animal: true # Enable/disable the detection of animals for 'MULTI_CLASS_BOX_X' models
mc_electronics: true # Enable/disable the detection of electronic devices for 'MULTI_CLASS_BOX_X' models
mc_fruit_vegetable: true # Enable/disable the detection of fruits and vegetables for 'MULTI_CLASS_BOX_X' models
mc_sport: true # Enable/disable the detection of sport-related objects for 'MULTI_CLASS_BOX_X' models打开驱动:
终端1:
cd ~/path_yours/catkin_zed/
source devel/setup.bash
roslaunch zed_wrapper zed2i.launch开始录制:
终端2:
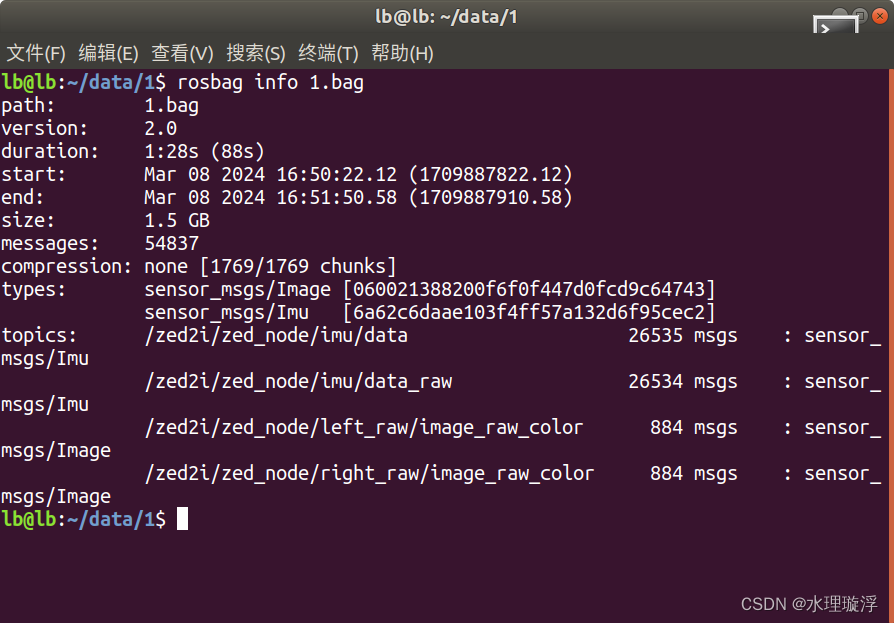
rosbag record -O zed_result /zed2i/zed_node/depth/depth_registered /zed2i/zed_node/imu/data /zed2i/zed_node/imu/data_raw /zed2i/zed_node/left_raw/image_raw_color /zed2i/zed_node/left/image_rect_color /zed2i/zed_node/right/image_rect_color /zed2i/zed_node/right_raw/image_raw_color需要注意的地方,我都用中文注释了,自己摸索出来的,如果有谬误,欢迎指正~



















 2194
2194

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











