










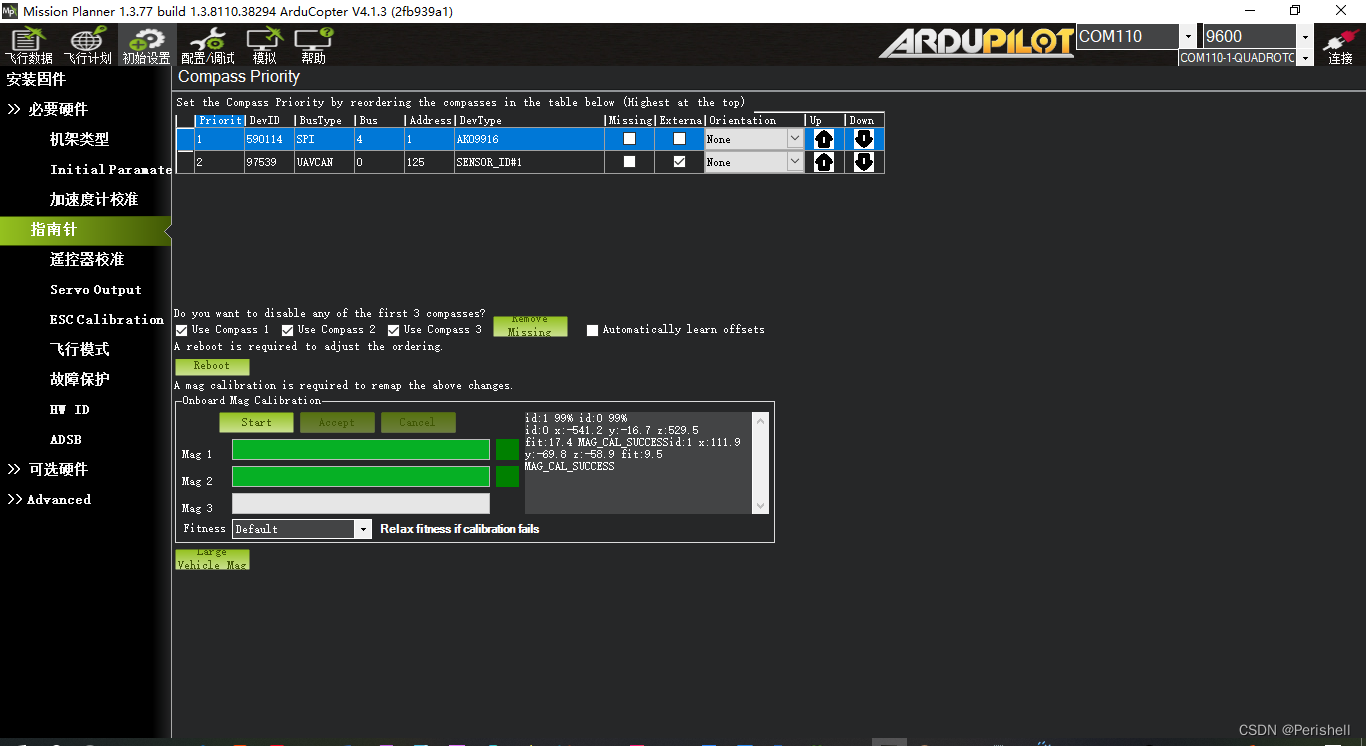
有的时候可能会出现校准不了的情况,可以尝试去掉一个罗盘,一般去掉的是内置罗盘,用外置的罗盘,就能够达到要求。将外置的罗盘设置为主罗盘,内置罗盘不勾选就可以实现这样的功能。
从左右副翼开始,一般需要调节的地方比较少,先用舵侧将其粗调节看看两端的限制幅度以及调整到中间的位置,然后再通过servo out细调节副翼的上下限幅和中间位置。
然后对左右平尾进行调节,和左右副翼的调节方法差不多,先用舵侧粗调节,如果粗调节不够的话,在对飞机的平尾机械结构进行调节,对其舵机连杆的长度进行调节,最后也是通过servo out细调节平尾的上下限幅和中间位置。
接着对方向舵机进行以上的相同操作,同样调整两边的输出限幅处在一个相差不大的范围,和判断在中间的位置。
然后是调节电调的操作,为了让电机的转动更加同步,最好采用一根Y线来连接两根电调,然后对电调进行调节。调节步骤如下:遥控器油门推最大档,遥控器开机,飞控连地面站,地面站解锁,飞机电调上电,飞机安全开关解锁,听到滴声,遥控器油门推最小,听到滴滴滴滴滴滴声,此时推油门,电机转动进行测试。
一般坏的位置是前轮部分容易在降落的过程中进行碰撞,然后掉落下来,还有容易坏的地方是尾部的平尾舵机,可以直接用舵侧去判断是否坏掉了,必须找相同类型的舵机才能更好的保持同步的操作。
- 组装、调试和修理固定翼无人机总结
-
组装固定翼的过程中,有两个重要的地方,一个是飞机的左右副翼、左右平尾、油门以及左右电调,一般的话,下载了固定翼的固件以后,在扩展参数调参的部分会显示各个飞控端口所对应的功能。所以按照那个顺序将各个端口连接在一起就可以。注意信号线和正负电压线不要接反了。如果飞控的端口发现有不好用的地方,可以调整到辅助端口,扩展参数中的端口9以及之后的端口对应飞控上的辅助端口。第二个地方就是飞机组装的桨叶是通过薄的一面切割空气所产生的升力,而且飞机的前后电机都应该以一个内旋的方向进行旋转。记住左黑右白的硬件构成。还有飞机的电机最前面的那个保护头旋转方向是和飞机的电机方向相反的方向拧进去的,因此切记在卸下来的时候一定要注意方向,不然很容易拧坏。
校准罗盘
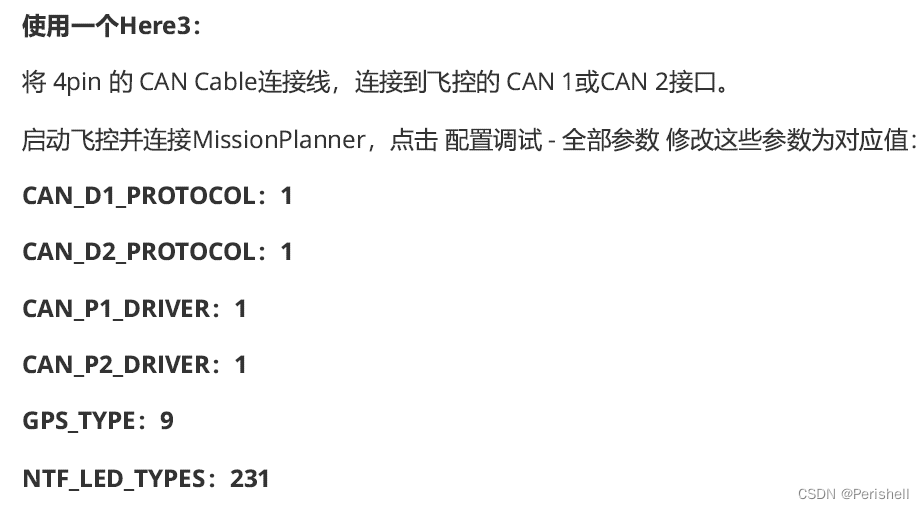
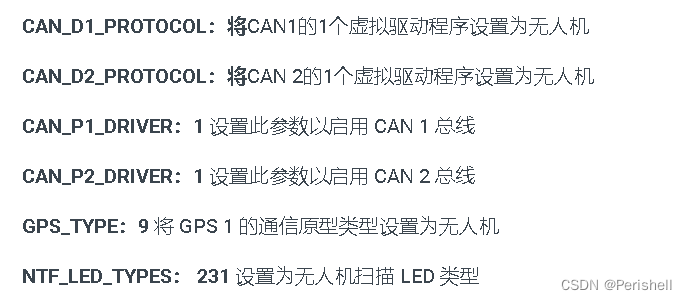
在罗盘的校准过程中一开始需要给罗盘设置这些参数,不然的话,很有可能不会发光,没有任何罗盘显示的现象,或者会出现校准的时候只有一个内置罗盘的现象出现。因此首先应该在全部参数列表里面添加这些参数。校准的时候最好绕着飞机的三个轴的方向正向180反向180进行校准。
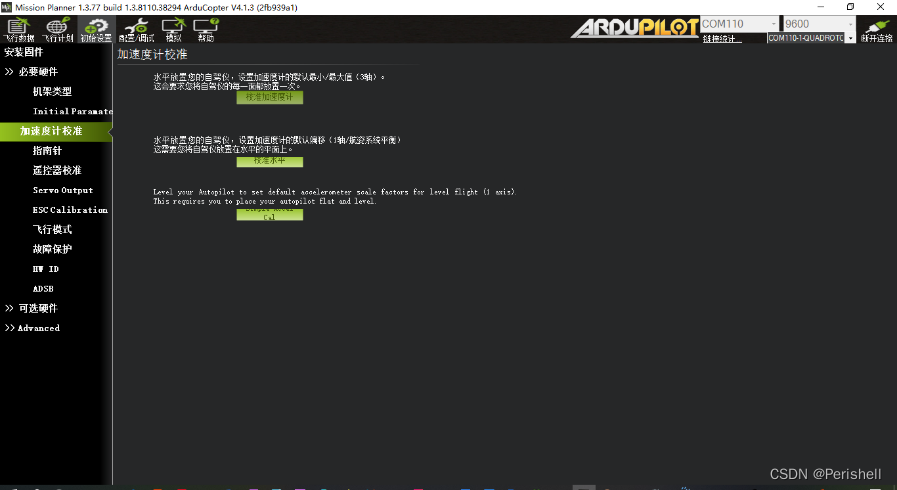
- 加速度计校准
-
- 遥控器校准
-



- 从飞行数据界面看右下角的模式部分,通过遥控器的B通道改变模式,看其变化,最下面是FBWA,中间是Guided,最上面是RTL,C通道一般是Motor Emergency,D通道设置的是Auto指令,这条指令必须在加载航点以后才能显示,还有E通道设置的是一个CIRCLE,这条指令可以让无人机绕圈的一个指令,绕圈的半径大小取决于遥控器油门的大小,因此,这个圈的大小可以通过控制速度来实现。
- 指南针校准步骤
- 校准电机
- 修理无人机


















 1万+
1万+

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











