







这几天在研究科学上网,我就不写出来了。总之,我把PX4拉到了自己的电脑上。
在入门的过程中,我根据自己以前的学习习惯,开始大面积地搜集教程视频,可惜并没有!
这下我瞬间没招了,在热心网友的指点下,我开始啃PX4官方文档密密麻麻的英语让我马上回忆起当初大学英语六级飘过时的心悸。一万个不情愿地读起来。直到我读到Gazebo Simulation,瞬间能看懂在说神魔了。
最后我只想说,english真香,句柄TMD滚犊子。
下面记录一下我的操作:
1. 布置场景,召唤小飞机
make px4_sitl_default gazebo_plane_cam__warehouse
# gazebo_机型__场景
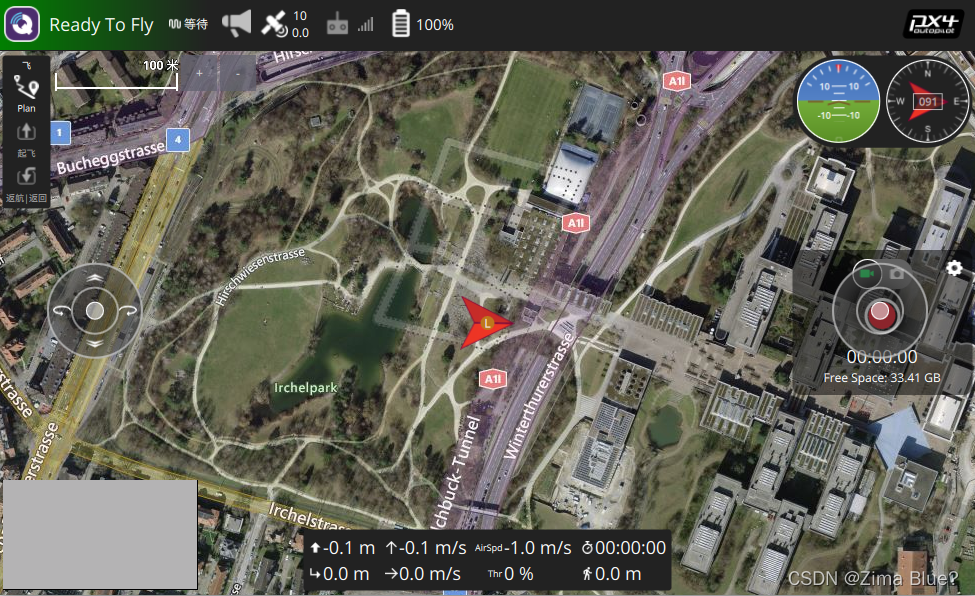
2. 打开QGC 自动连接飞机,连接失败检查连接方法
3.飞机跟随视角,不搞这一步,飞机直接起飞不见了。这图官方把来的。

4.起飞
pxh> commander takeoff
 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章
















 4227
4227











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









