







1、下载demo 3D点云/矢量地图数据、rosbag包
载示例 3D 点云/矢量地图数据
wget https://autoware-ai.s3.us-east-2.amazonaws.com/sample_moriyama_data.tar.gz下载ROSBAG 格式或ROSBAG2 格式的示例数据
wget https://autoware-ai.s3.us-east-2.amazonaws.com/sample_moriyama_150324.tar.gz或者
wget https://autoware-ai.s3.us-east-2.amazonaws.com/sample_moriyama_150324.bag2.tar.gz演示运行
假设
从源代码构建的 Autoware:演示版data并rosbag已下载到“下载”文件夹中。
Autoware 从 docker 镜像运行:演示data并rosbag已下载到shared_dir主机内的文件夹中。
步骤
1创建.autoware目录并提取其中的演示数据。
来自来源:
$ cd ~
$ mkdir .autoware
$ cd .autoware
$ cp ~/Downloads/sample_moriyama_* .
$ tar zxfv sample_moriyama_150324.tar.gz
$ tar zxfv sample_moriyama_data.tar.gz
使用 Docker:
$ cd ~
$ mkdir .autoware
$ cd .autoware
$ cp ~/shared_dir/sample_moriyama_* .
$ tar zxfv sample_moriyama_150324.tar.gz
$ tar zxfv sample_moriyama_data.tar.gz
2.运行Autoware
对于 Autoware 版本 1.12.0 及更高版本
$ cd autoware.ai
$ source install/setup.bash
$ roslaunch runtime_manager runtime_manager.launch
对于 Autoware 版本 1.11.0 和 1.11.1
$ cd autoware/ros
$ source install/setup.bash
$ ./run
对于 Autoware 版本 1.10.0 或更早版本
$ cd autoware/ros
$ source devel/setup.bash
$ ./run
3.转到Simulation , 加载位于 ~/.autoware 目录中的示例 ROSBAG 数据。需要勾选 "显示隐藏文件" 选项(快捷键Ctrl+H),以便显示 .autoware 文件夹。
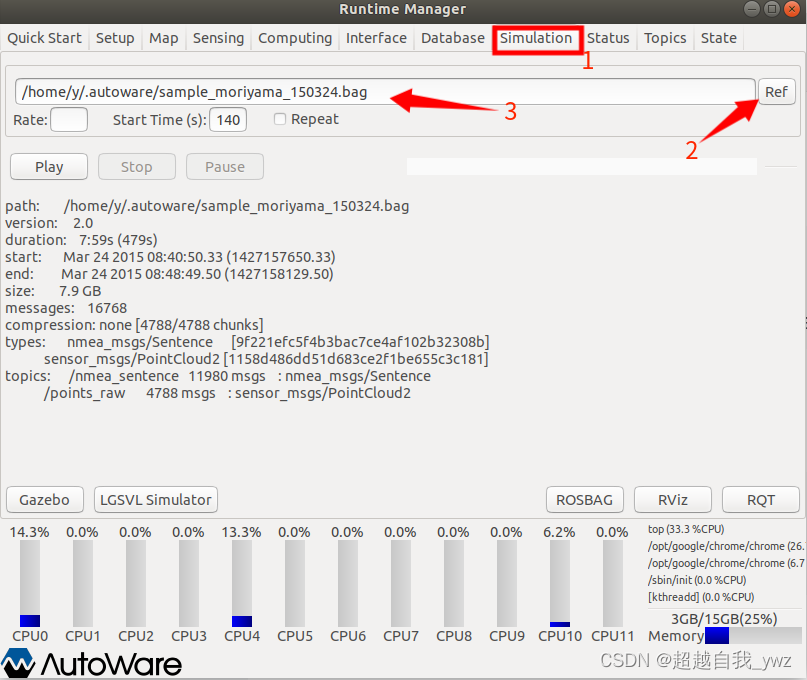
4.将开始时间设置为140,然后在开始播放后单击Play之后点击Pause。

5.通过 ARM(Autoware Runtime Manager)底部右下角的 RViz 按钮启动 RViz,并加载 Autoware 提供的 default.rviz 配置。在 rviz 中,打开配置文件,依次点击 "File"(文件) -> "Open Config"(打开配置),导航到路径 autoware.ai/src/autoware/documentation/autoware_quickstart_examples/launch/rosbag_demo/default.rviz。

6,进入 StartARM 选项卡的 Quick 中,将预装的roslaunch脚本一一加载。这些脚本位于autoware.ai/src/autoware/documentation/autoware_quickstart_examples/launch/rosbag_demo/ 。加载完成之后,需要通过单击左侧按钮来启用脚本。

7,转到Simulation , 取消Pause, 开始模拟,模拟Map将在 Rviz 中显示点云图

教程视频连接,https://www.youtube.com/watch?v=cMcvMvwIAdE
原文连接:ROSBAG Demo · Wiki · Autoware Foundation / MovedToGitHub / autoware · GitLab














 139
139











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









