







1、下载demo 3D点云/矢量地图数据、rosbag包
终端执行:
wget https://autoware-ai.s3.us-east-2.amazonaws.com/sample_moriyama_data.tar.gz (3D点云地图)
wget https://autoware-ai.s3.us-east-2.amazonaws.com/sample_moriyama_150324.tar.gz (ROSBAG)
下载速度慢,可以使用如下的百度云资源下载:
链接:https://pan.baidu.com/s/1mgM_g1UUhM6cUQuYeuKdyw 提取码:auto
将下载的data数据放到/home/.autoware里面
2、启动roslaunch,进去到autoware插件
roslaunch runtime_manager runtime_manager.launch
3、点击主界面Simulation,加载bag包数据,将start time调至140,点击play,2s后点击下暂停。

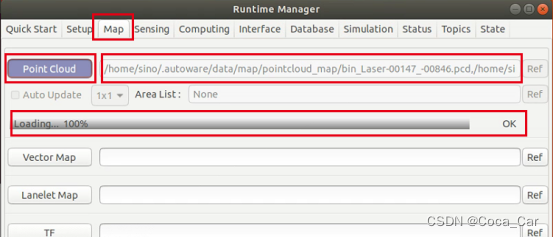
4、点击主界面的map,加载点云,将.autoware/data/map/pointcloud_map中所有点云都选中加载进去,看到加载进度条到100%时,即加载成功。再次进入simulation,play2秒。
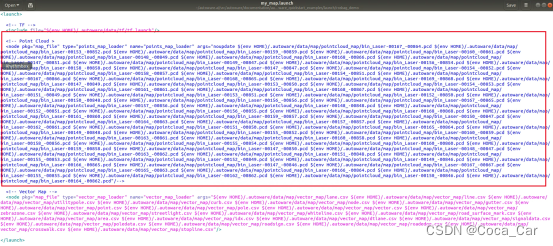
注:由于刚刚单独加载了点云地图,所以需要修改my_map.launch文件,将其中的point_cloud注释掉。
5、打开rviz,点击主界面Quick Start,加载所需的launch文件,launch文件都在autoware.ai/src/autoware/documentation/autoware_quickstart_examples/launch/rosbag_demo。

6、点击simulation,play bag包,成功运行demo。
















 3593
3593











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









