






👨🎓个人主页
💥💥💞💞欢迎来到本博客❤️❤️💥💥
🏆博主优势:🌞🌞🌞博客内容尽量做到思维缜密,逻辑清晰,为了方便读者。
⛳️座右铭:行百里者,半于九十。
📋📋📋本文目录如下:🎁🎁🎁
目录
💥1 概述
由于道路上车辆数量的增加,大城市和热门目的地周围的交通不便。在最近的研究中,模型和模拟已被用于从拉格朗日和欧拉角度理解交通的特性和行为。在本文中,我们介绍了一种微观模型,一种欧拉视角模型的形式,它模拟了空间密度和车辆速度之间的关系。首先模拟了具有理想驾驶条件的基线模型,以允许在不同交通场景之间进行比较。
该模型保持了所需的速度和安全距离。接下来,引入了一个入口坡道,允许将汽车注入系统,从而增加了模型中的整体汽车密度。此外,车道在规定时间后被关闭,迫使所有车辆并入剩余的开放车道。这两种情况都导致与基线模型相比速度总体下降,直到达到稳态值。最后,我们将基线模型和入口匝道和封闭车道场景中系统中的车辆数量增加了一倍,以分析交通影响。
交通流微观模型研究综述
一、定义与分类
交通流微观模型以单个车辆-驾驶员单元为研究对象,通过动态变量(位置、速度、加速度)描述车辆间的相互作用。主要分为以下两类:
- 车跟车模型(Car-following Models)
通过微分方程描述车辆加速度与前后车状态的关系,代表模型包括:- Gipps模型(1981):基于安全制动距离的保守驾驶策略;
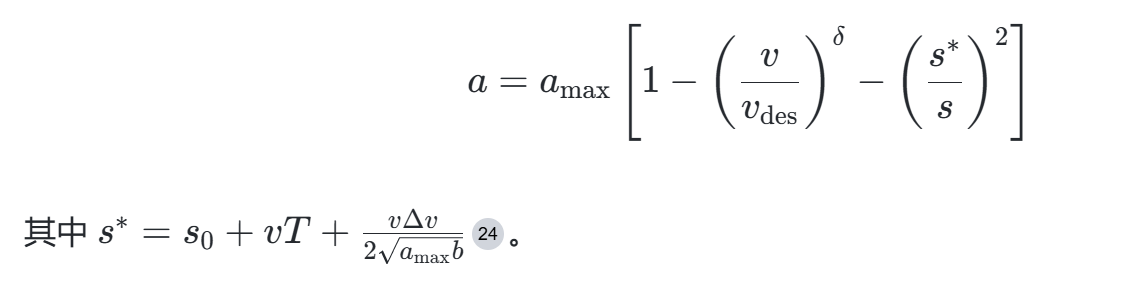
- 智能驾驶员模型(IDM) (1999):融合期望速度和安全距离,公式为:
- 元胞自动机模型(Cellular Automata Models)
将道路离散化为元胞(Δx=1.5m),时间步长Δt=1s,通过规则更新车辆状态。典型模型包括:- Nagel-Schreckenberg模型(NaSch) (1992):引入随机减速概率模拟驾驶不确定性;
- 可变元胞模型(2024):动态调整元胞尺寸以反映真实车辆几何特征,结合跟驰理论计算专属加速度。
二、研究现状与核心成果
-
模型演进
- 跟驰模型:从Pipes的线性模型(1953)发展到多因素综合的MHAVD模型(考虑间距、速度、加速度差)。
- 元胞自动机:从规则184到可模拟多车道、多车型的改进模型,如双车道NS模型和雾天分段建模。
- 混合模型:结合微观参数与宏观变量(如密度、速度方差),形成局部场模型和并行混合模型。
-
关键技术突破
- 数据驱动标定:基于WIM系统实测数据提取自由流速度(vnEFDV)和跟驰时距(TnETH);
- 仿真效率优化:通过向量化加载和动态元胞划分提升计算效率,支持大规模路网实时模拟;
- 异质性处理:针对不同车型、驾驶风格设计参数分布,模拟卡车限速等场景。
三、典型应用场景
-
交通安全评估
- 雾天跟驰模型:通过随机慢化规则模拟低能见度下的制动行为,优化安全间距;
- 紧急制动模拟:再现车辆从自由行驶到跟驰状态的转换过程,验证防碰撞策略。
-
交通控制优化
- 信号交叉口右转行为分析:结合行人干扰因素改进OV模型,优化信号配时;
- 桥址荷载模拟:基于可变元胞模型精确计算车辆轴载对桥梁结构的影响。
-
智能交通系统(ITS)
- 自动驾驶测试:通过SIL(软件在环)平台(如TESS NG+VTD)生成虚拟交通环境;
- 车联网(V2X)影响分析:评估ACC系统对交通流稳定性的作用。
四、研究方法与工具
-
仿真软件
工具 特点 VISSIM 支持公共交通仿真和动态交通分配,适用于复杂城市路网 TESS NG 国产高密度混合交通流模拟,精准刻画机非混行场景 AIMSUN 多尺度模型融合,支持宏观规划与微观仿真的接口集成 -
数据分析技术
- 移动平均聚合:将微观变量(位置、速度)转化为宏观密度、流量;
- 机器学习标定:利用神经模糊方法优化模型参数,减少主观性误差。
五、挑战与未来方向
-
现存问题
- 参数标定依赖经验:不同驾驶场景下模型泛化能力不足;
- 数据获取瓶颈:高精度车辆轨迹数据(如紧急制动)难以大规模采集;
- 计算复杂度:多车道多车型模型的实时性仍待提升。
-
前沿趋势
- 多尺度模型融合:结合宏观LWR模型与微观跟驰规则,实现全域交通状态预测;
- AI增强仿真:利用强化学习优化车辆决策规则,模拟人类驾驶的认知偏差;
- 车路协同验证:通过数字孪生技术实现虚拟-现实交通系统的闭环测试。
六、结论
交通流微观模型通过精细化车辆行为描述,为交通优化提供了理论基石。未来研究需突破数据与计算的限制,融合多学科方法,推动模型从“解释现象”向“主动调控”跃迁,最终服务于智慧城市与自动驾驶的协同发展。
📚2 运行结果








部分代码
%% --------------------------------------------------------------------------
function help_path = get_location_for_mapfile_and_topic(obj, map_filename, topic_id)
% Get the path from the search database using the map file name and topic
% id.
realErr = lasterror;
try
retriever = obj.factory.buildMapFileRetriever(map_filename);
help_path = obj.get_location_for_topic(retriever, topic_id);
catch
help_path = '';
lasterror(realErr);
end
end
%% --------------------------------------------------------------------------
function help_path = get_location_for_shortname_and_topic(obj, short_name, topic_id)
% Get the path from the search database using the short name and topic id.
realErr = lasterror;
try
retriever = obj.factory.buildDocSetItemRetriever(short_name);
help_path = obj.get_location_for_topic(retriever, topic_id);
catch
help_path = '';
lasterror(realErr);
end
end
%% --------------------------------------------------------------------------
function help_path = get_location_for_topic(~, retriever, topic_id)
help_path = char(retriever.getLocationForTopic(topic_id));
end
%% --------------------------------------------------------------------------
function file_path_exists = file_exists(~, file_path)
try
file_path_exists = com.mathworks.mlwidgets.help.HelpViewUtils.fileExists(file_path);
catch
file_path_exists = false;
end
end
🎉3 参考文献
部分理论来源于网络,如有侵权请联系删除。(内容仅供参考,具体以运行结果为准。)
[1]张明,李永义,谢晶晶.EA-GRU模型在城市交通行程时间预测中的应用[J].南京工业大学学报(自然科学版),2022,44(04):412-418.



















 1203
1203

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











