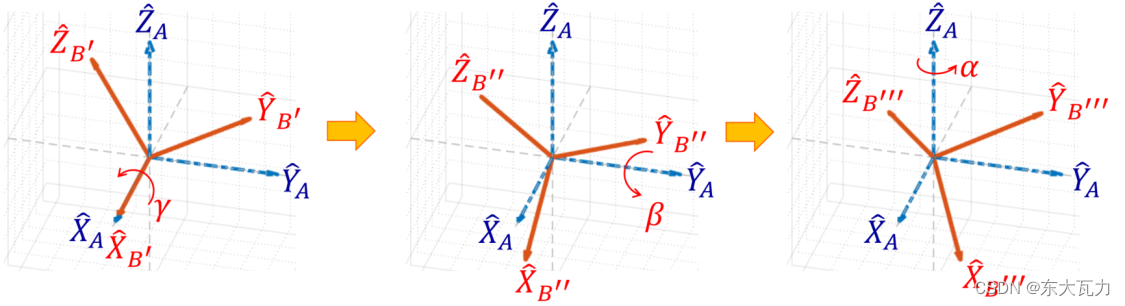
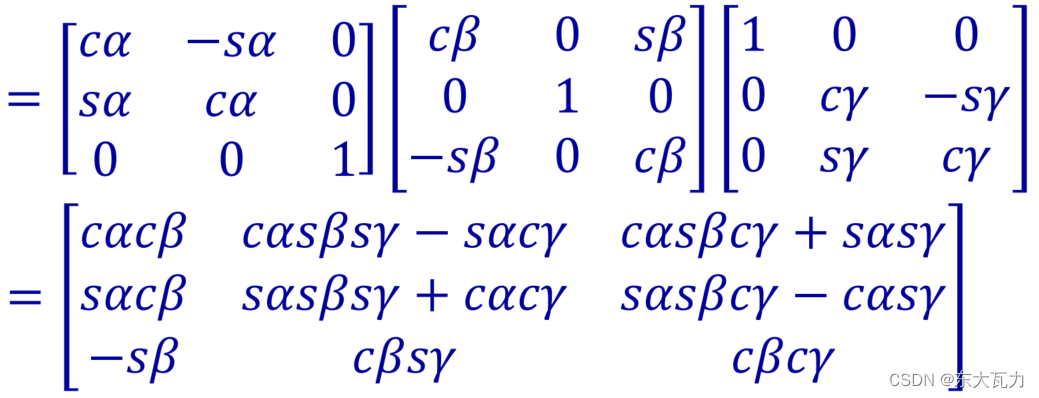
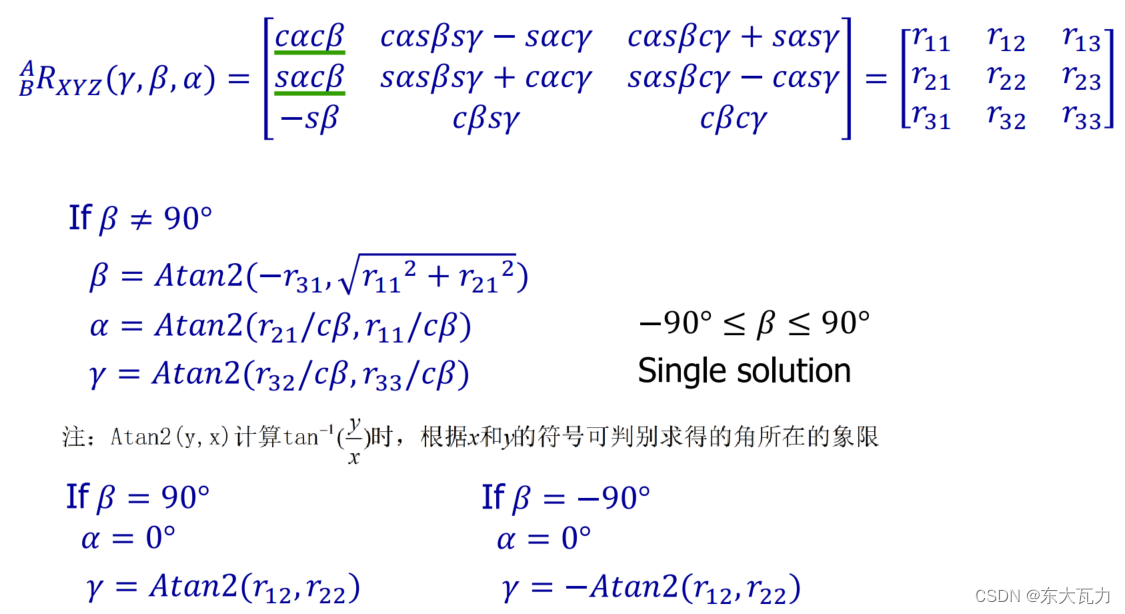
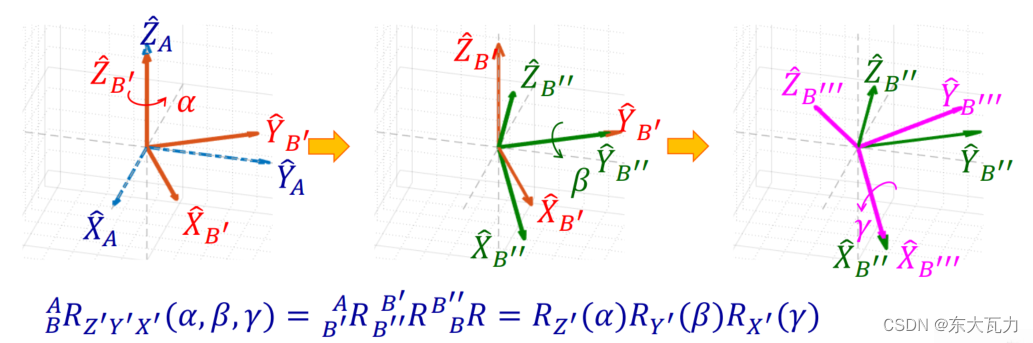
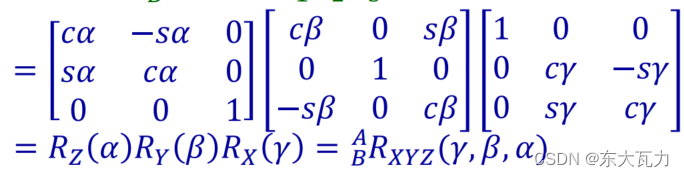
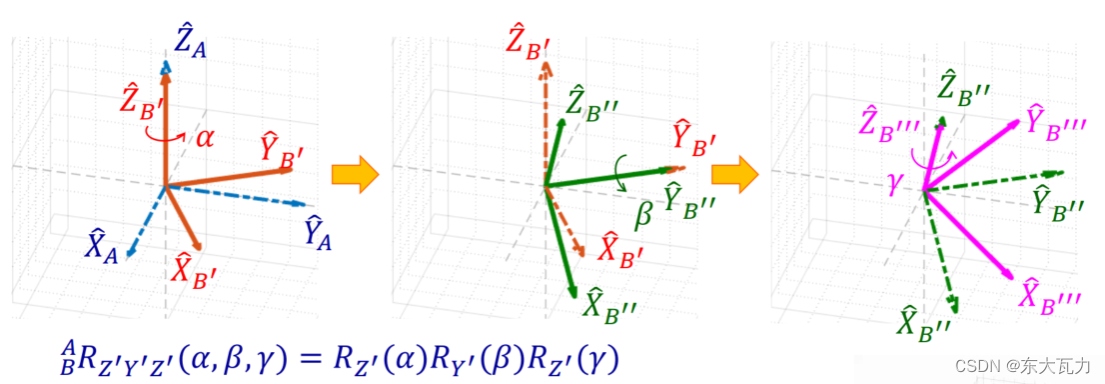
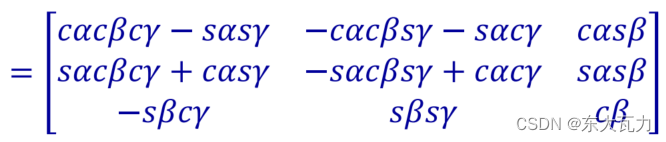
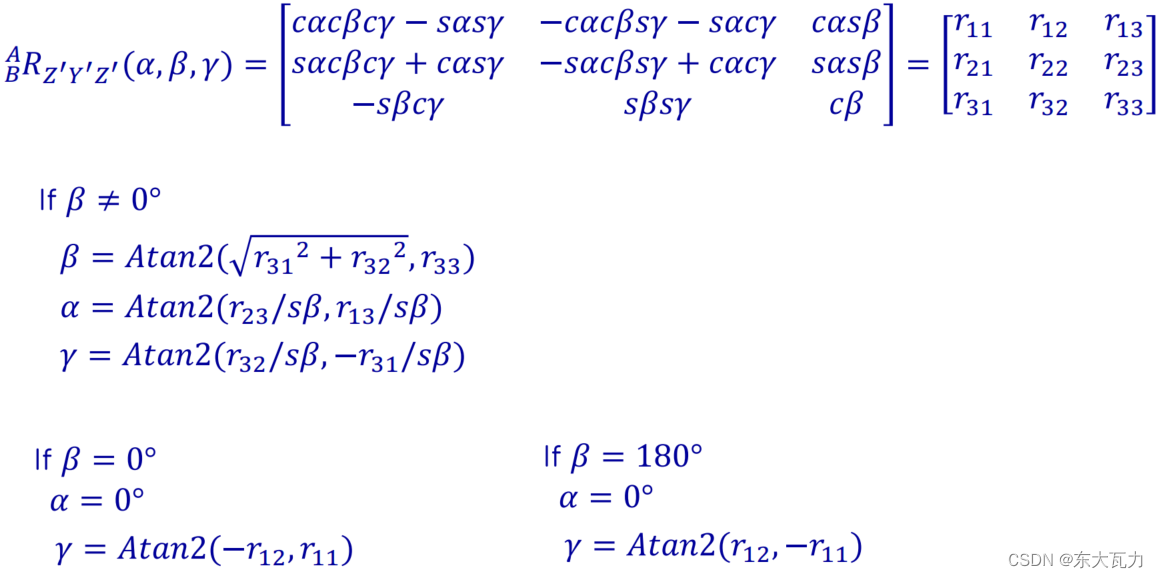
位姿描述 1.XYZ固定角 (1)由角度推算旋转矩阵 (2)由旋转矩阵推算角度 2.ZYX欧拉角 3.ZYZ欧拉角 (1)由角度推算旋转矩阵 (2)由旋转矩阵推算角度 4.参考 [1]约翰 J. 克雷格(John J. Craig)著的机器人学导论,第四版; [2]台湾大学机器人学之运动学—林沛群;



























 1745
1745











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言


 被折叠的 条评论
为什么被折叠?
到【灌水乐园】发言
被折叠的 条评论
为什么被折叠?
到【灌水乐园】发言






