







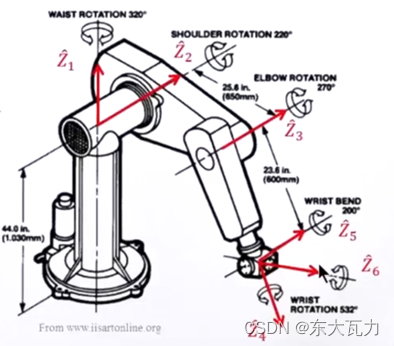
一:正运动学
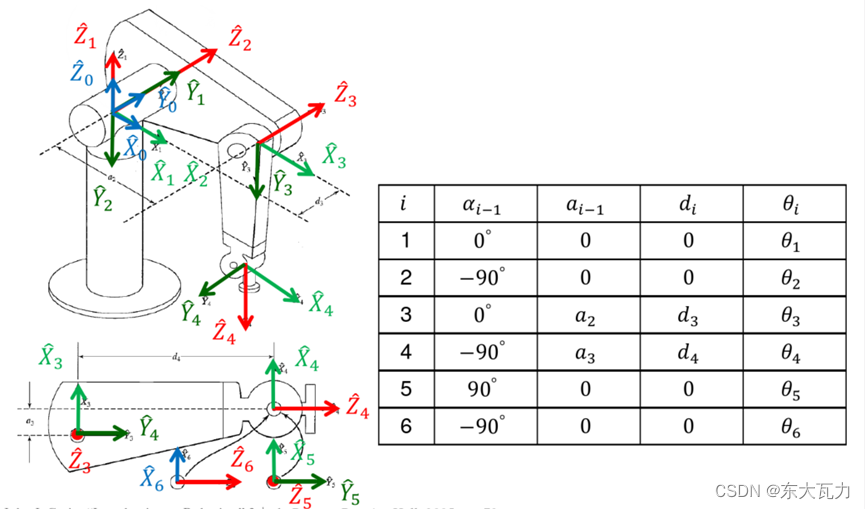
1.MDH建模
MDH建模详尽流程参考往期文章: 机器人学导论-运动学
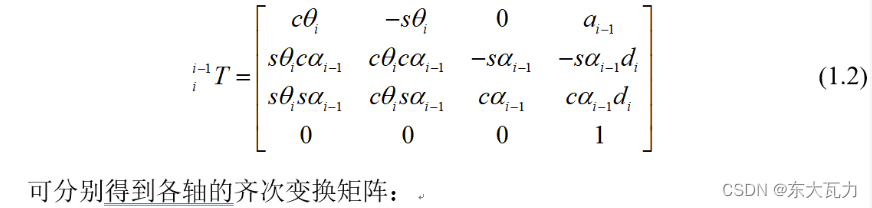
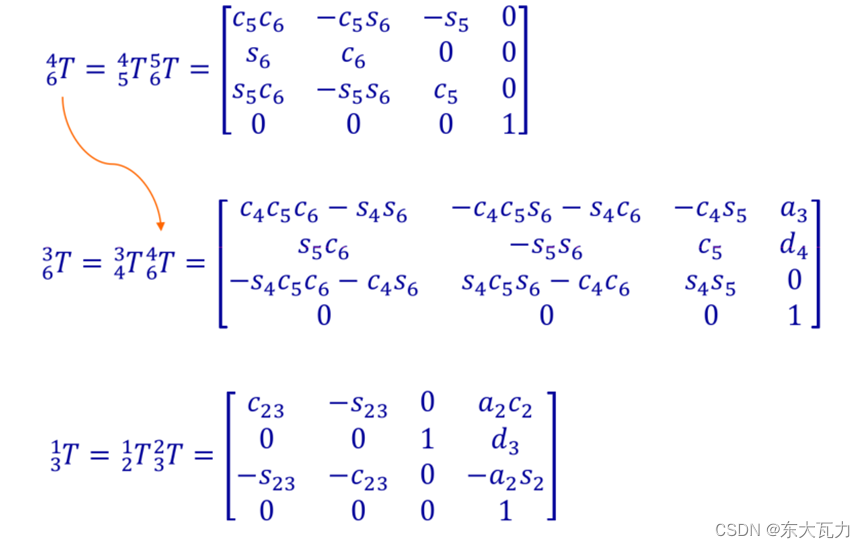
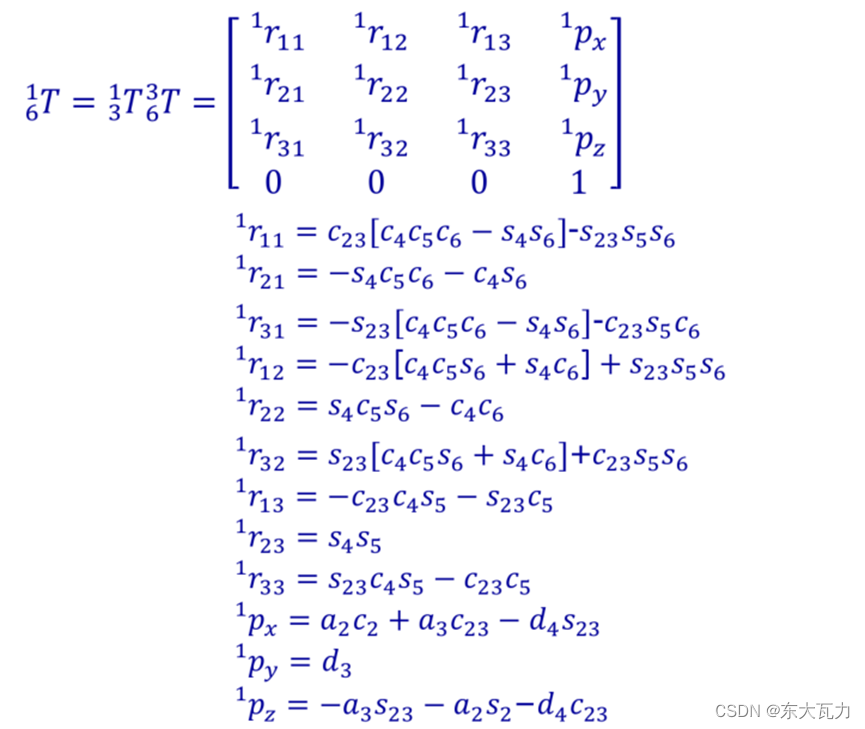
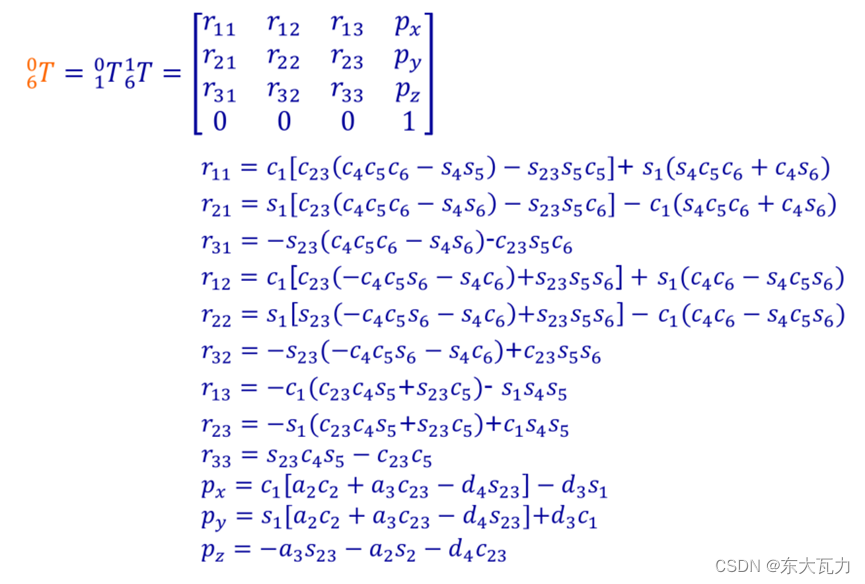
2.正运动学


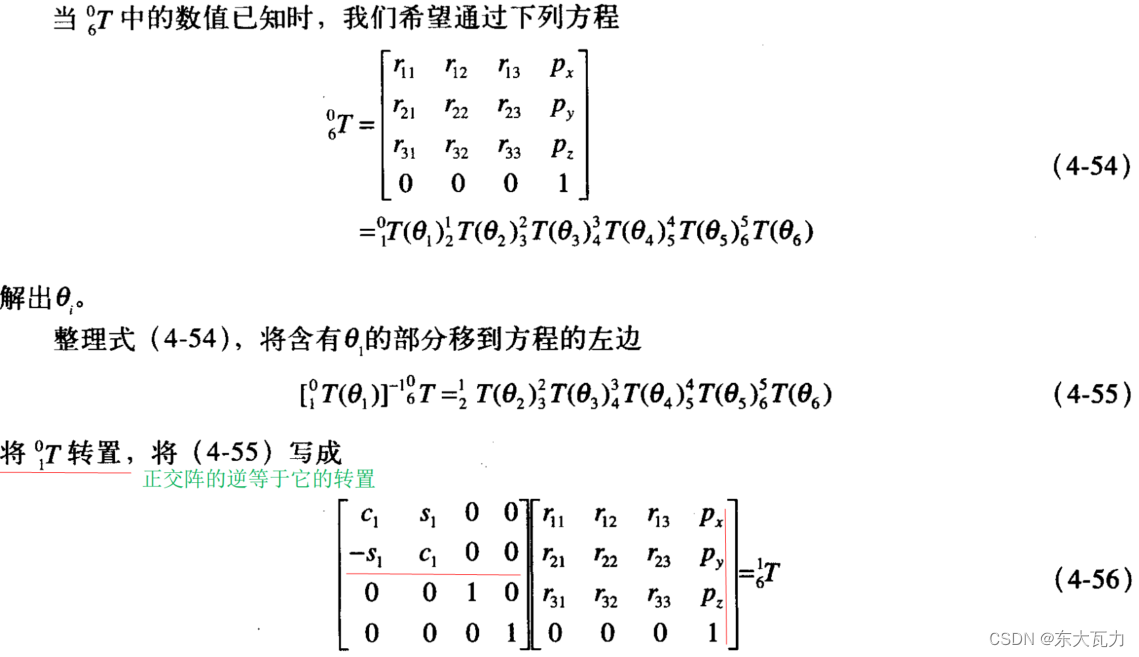
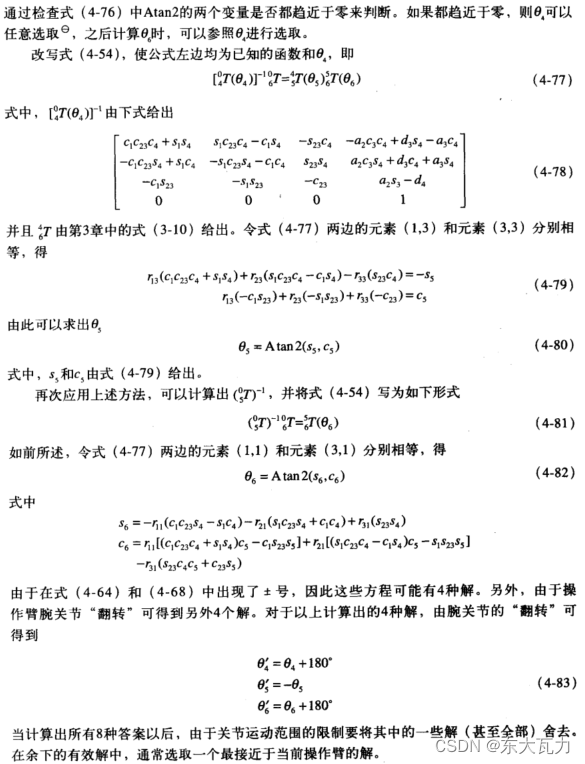
二:逆运动学(代数法)


三:参考
[1]约翰 J. 克雷格(John J. Craig)著的机器人学导论,第四版;
[2]台湾大学-机器人学之运动学—林沛群;
MDH建模详尽流程参考往期文章: 机器人学导论-运动学
[1]约翰 J. 克雷格(John J. Craig)著的机器人学导论,第四版;
[2]台湾大学-机器人学之运动学—林沛群;
 2804
2433
5918
2804
2433
5918

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言


























