






在用ros控制auboi5机械臂时,执行语句roslaunch aubo_i5_moveit_config moveit_planning_execution.launch sim:=false robot_ip:=192.168.*.*会出现如下报错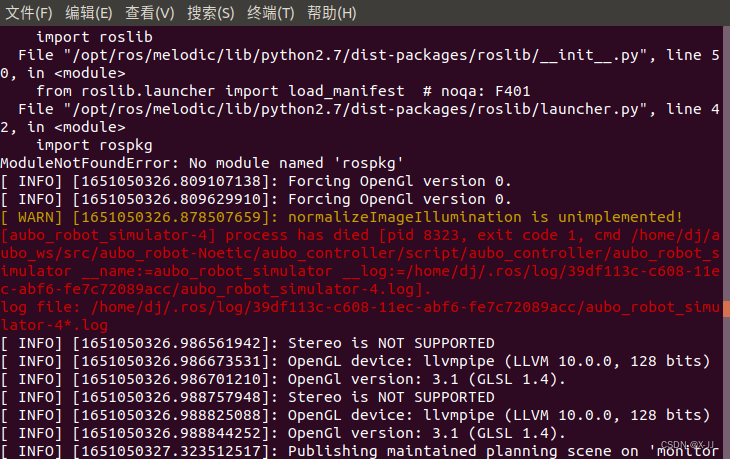
显示rospkg没有安装,重新安装即可。
pip install rospkg安装rospkg后还是显示有[aubo_robot_simulator]错误的话,
给出如下解决办法:
1、新打开终端单独运行
rosrun aubo_controller aubo_robot_simulator 这时候会显示关于industrial_robot_simulator的错误,如下图所示。
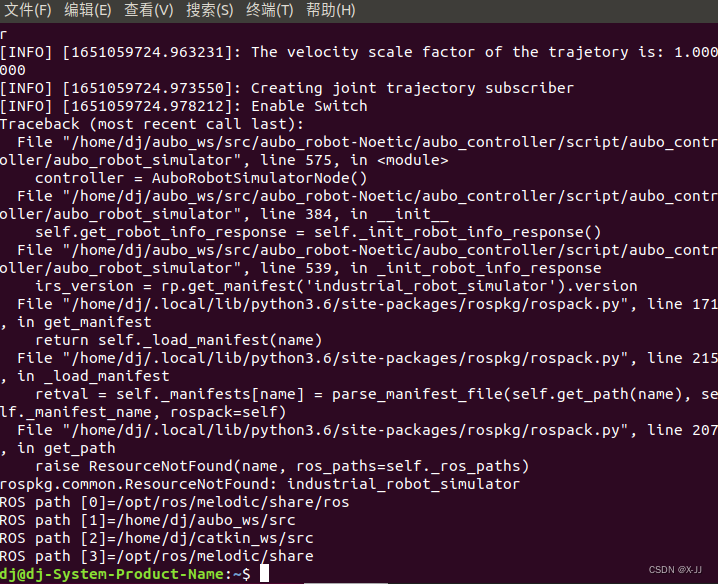
这时候只需要重新安装industrial_robot_simulator即可。
再新打开一个终端,输入sudo apt-get install ros-melodic-industrial-robot-simulator即可解决问题。
sudo apt-get install ros-melodic-industrial-robot-simulator下图为成功运行的截图。
















 1519
1519











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









