







1.打开roscore
2.打开ros仿真界面
输入
避坑:
rosrun gazebo_ros gazebo这里要用超级管理员权限运行gazebo
sudo gazebo
不然保存的时候会被卡注,冻结,这里搞了半个小时
空的世界环境
我们需要再这个空的世界环境上搭建我们需要的仿真环境
3.打开building editor 这上面是个二维平面
我们可以通过这个二维平面来构建三维空间
我们可以点击wall,在平面上进行拖拉 ,添加墙壁
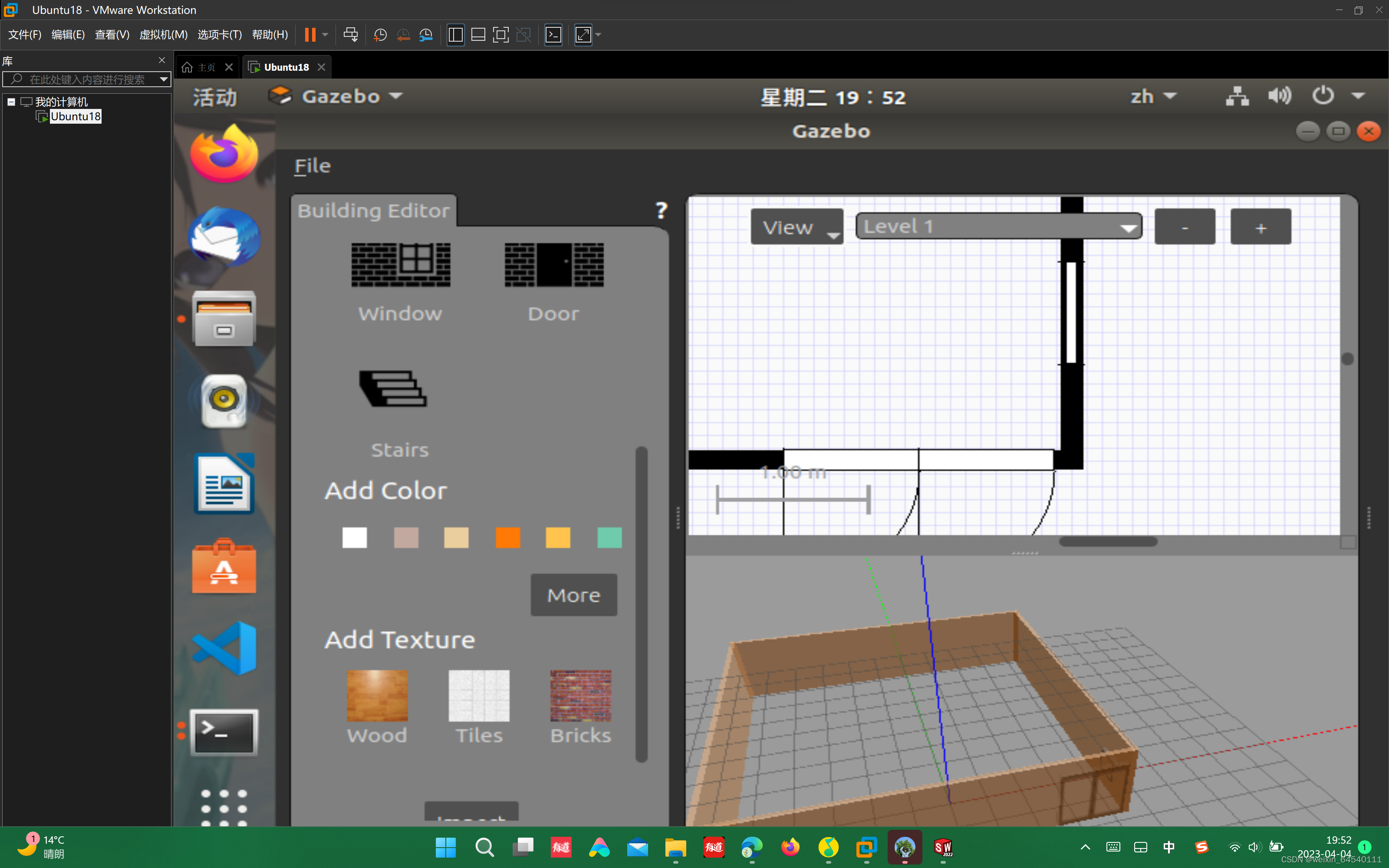
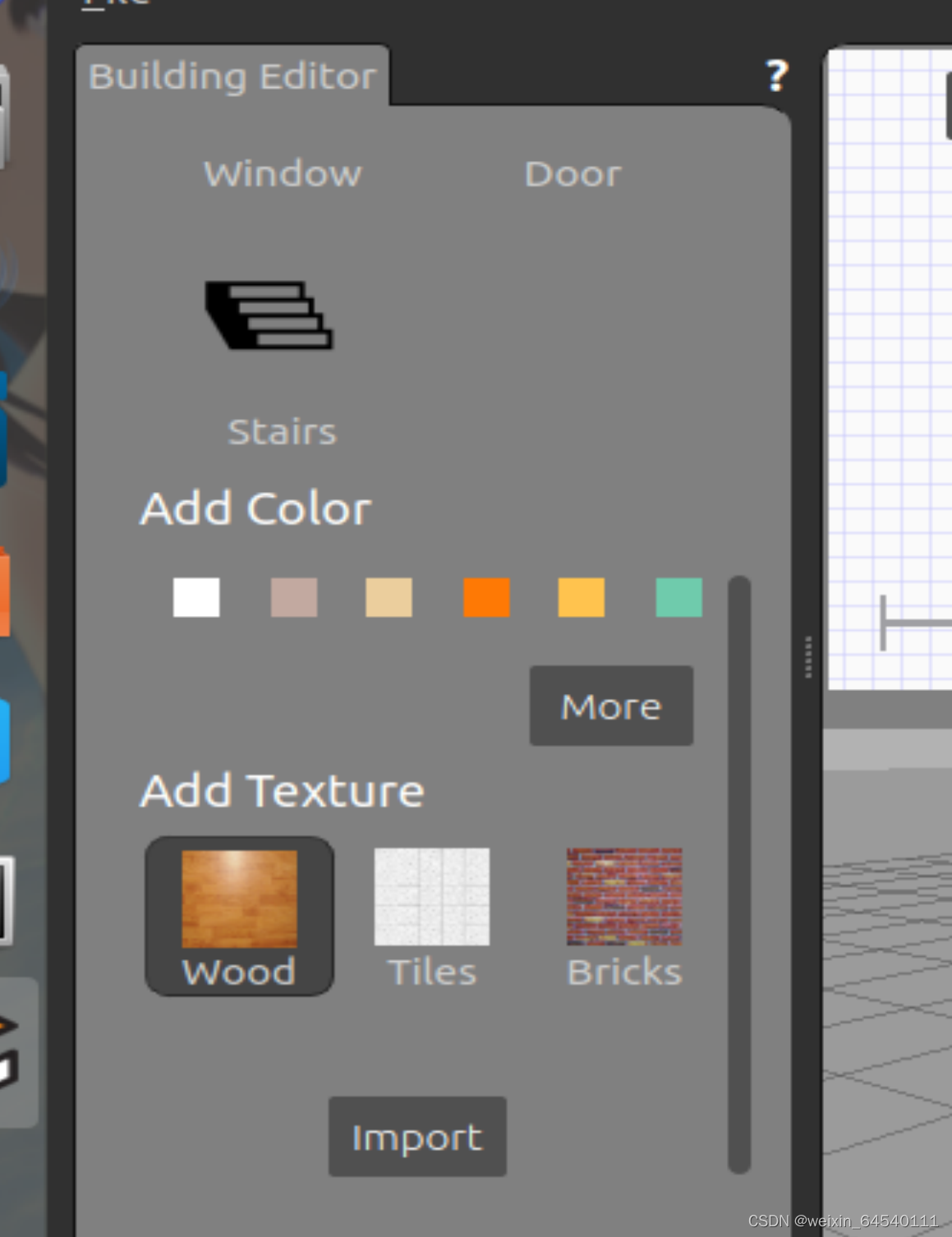 还可以尝试添加窗户,门,还有滑梯等组件,我们还可以右击它更改属性
还可以尝试添加窗户,门,还有滑梯等组件,我们还可以右击它更改属性
同时我们还可以给墙贴贴纸
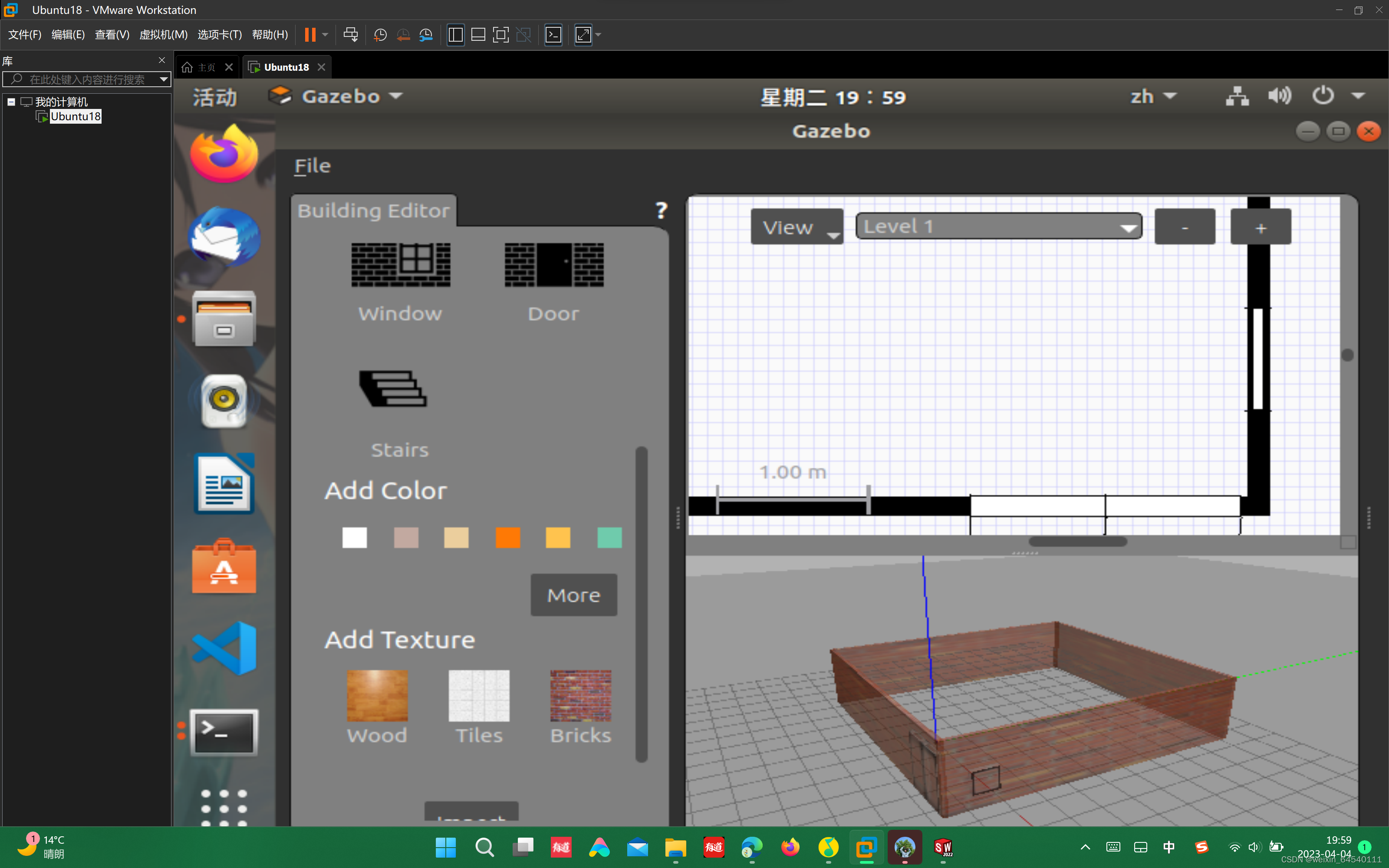
构建完成之后我们就可以保存了

点击save
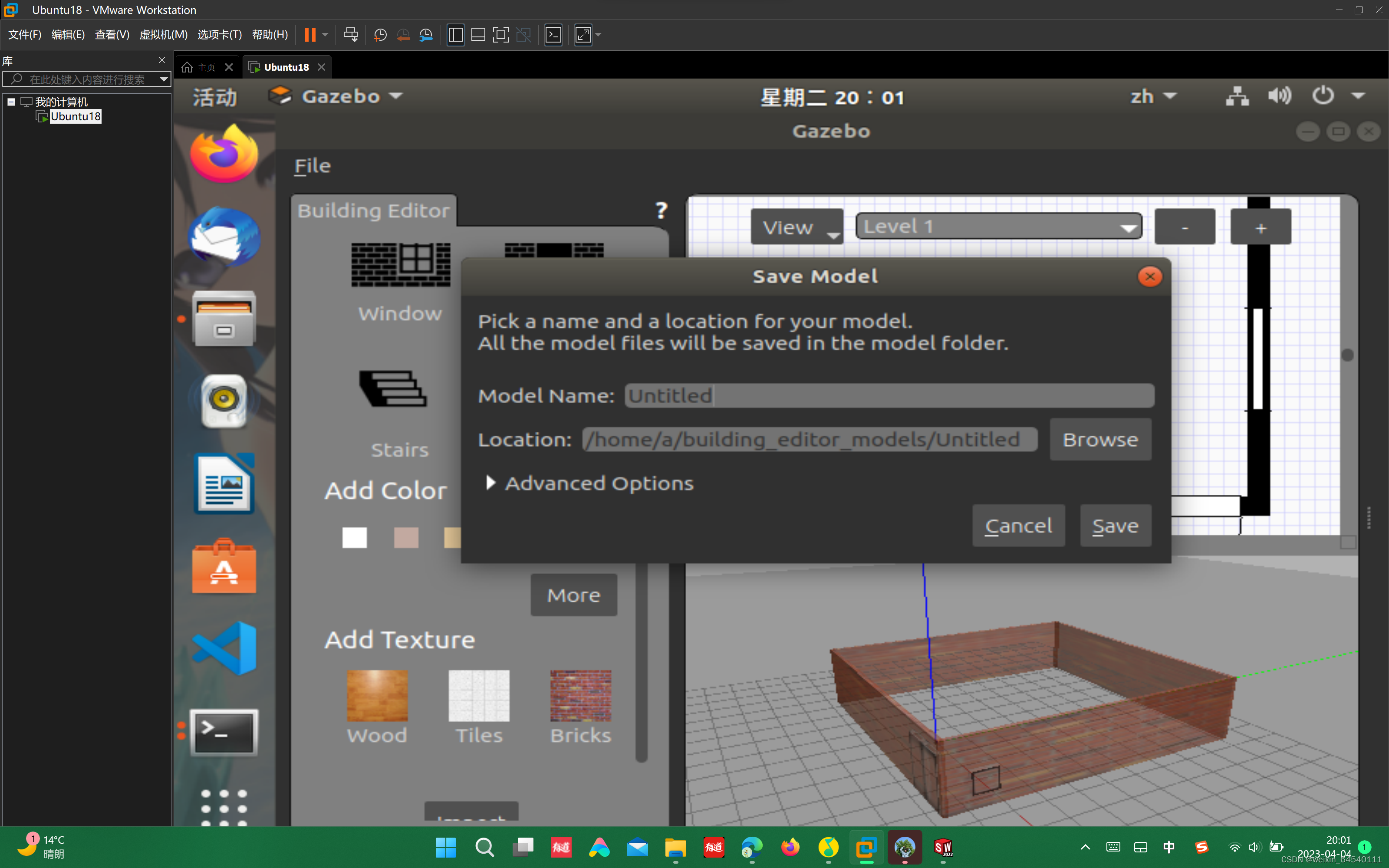
我们就默认路径
保存完之后就可以退出了
依次点击fill,然后最下面的,然后exit
保存文件——file——save as——保存在自己要用功能包下面
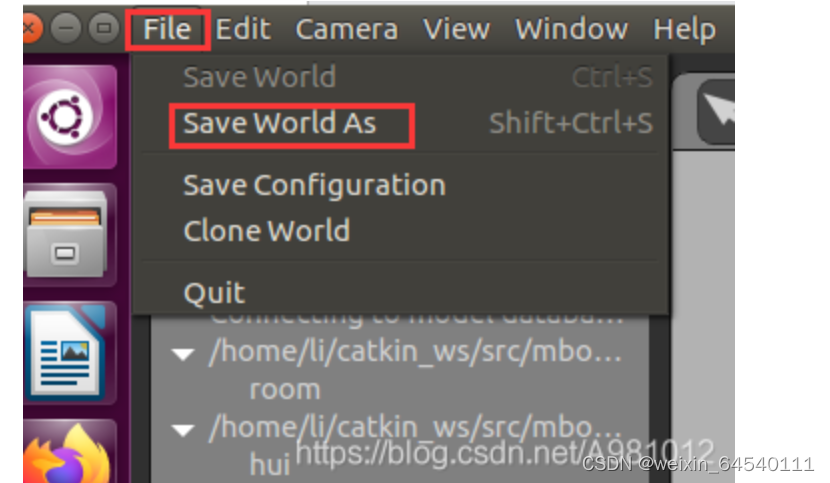
我们保存到对应的功能包下面wordls文件夹下面
这个文件名字一定要加world后缀
然后我们要编写一个launch文件















 507
507











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









