







1. 代码流程
1.1. extractSurroundingKeyFrames()

1.2. scan2MapOptimization()
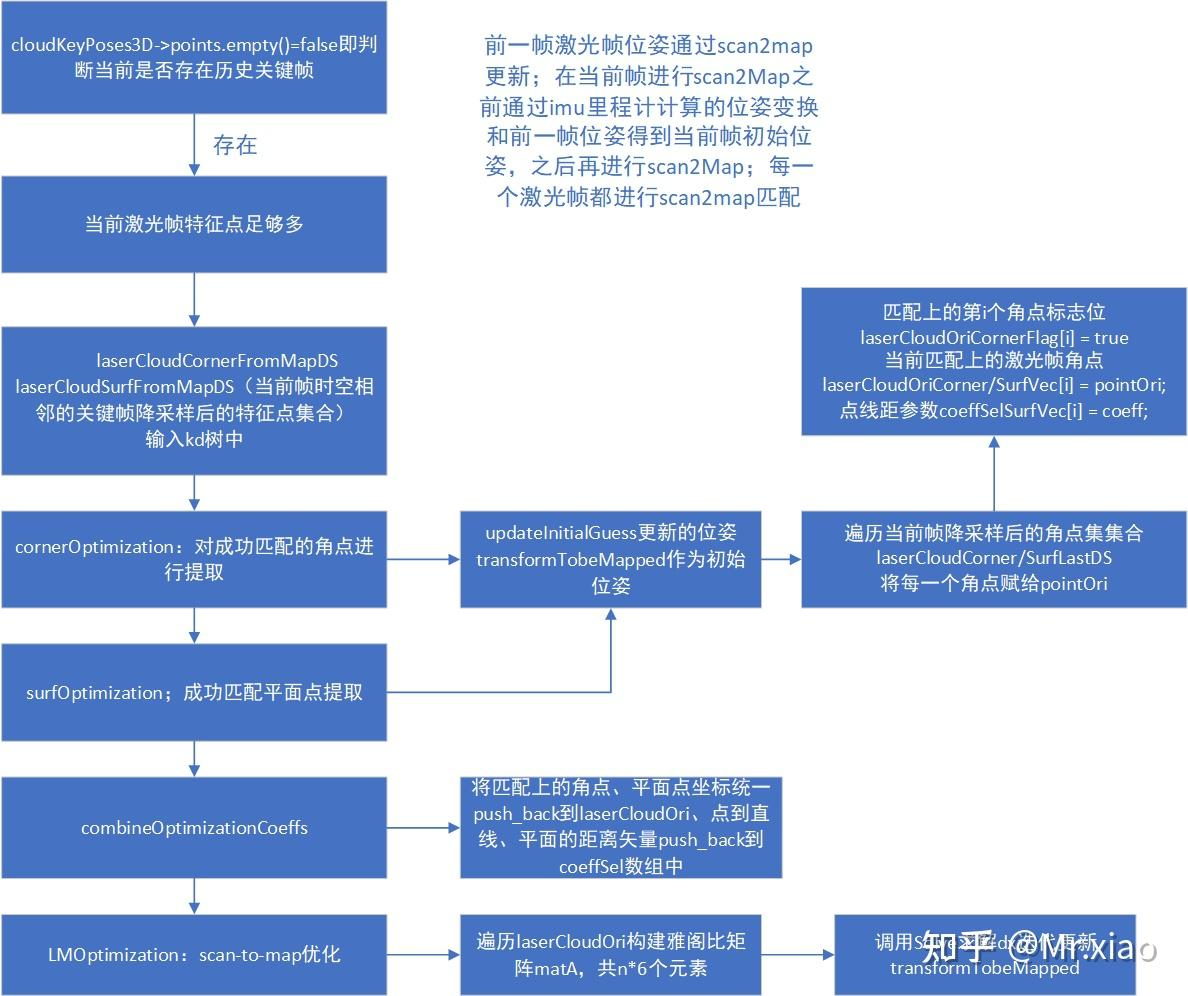
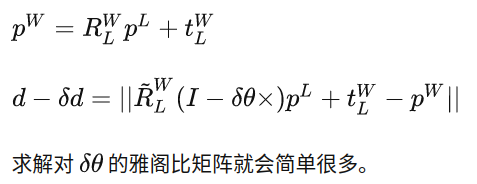
这个函数主要就是进行帧到地图的匹配,通过点到面、点到线的距离距离最小作为优化目标。
LOAM中雅阁比矩阵推导其实还是过于复杂了,可以使用进行误差扰动来计算雅阁比矩阵,姿态使用失准角(李代数)模型推导更为简单
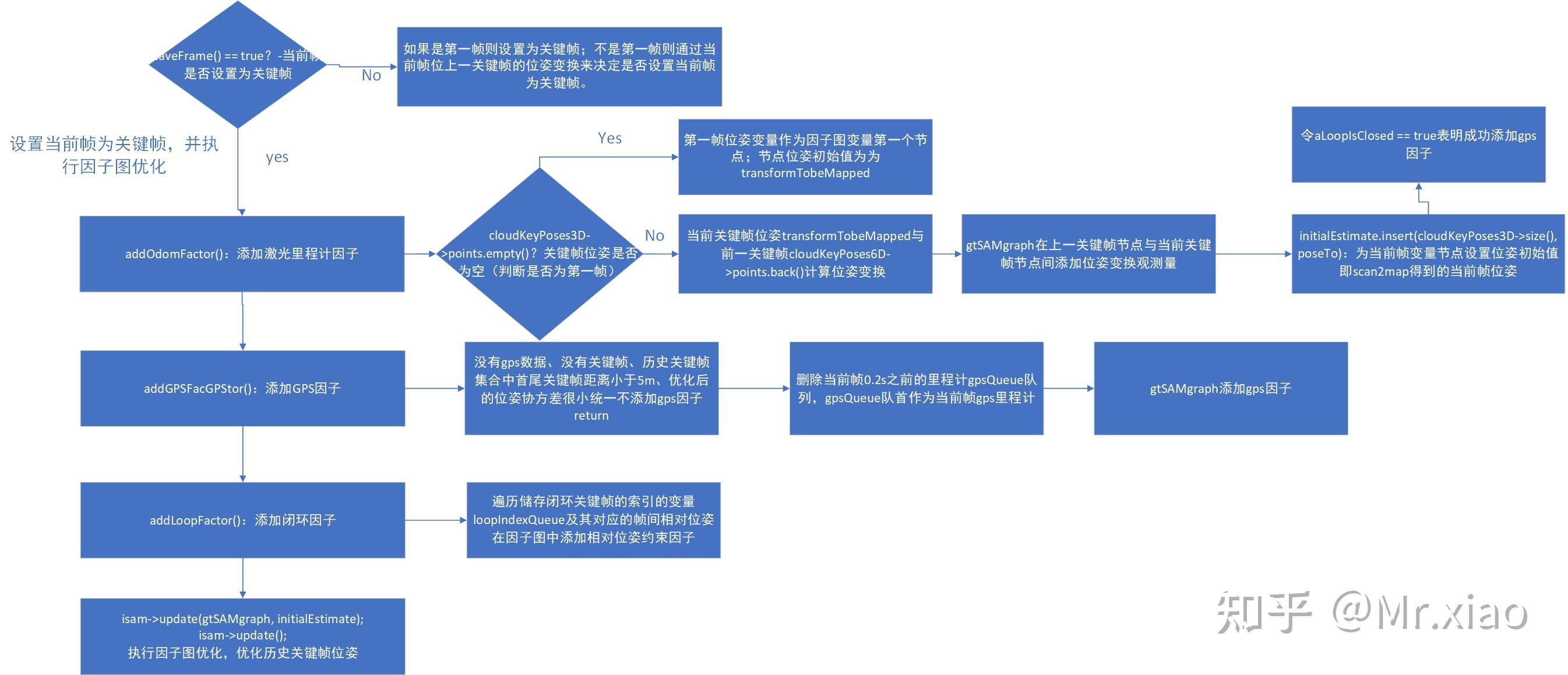
1.3. saveKeyFramesAndFactor()
在这个函数一直维持着一个关键帧节点构建的图,将GPS位置、关键帧间相对位姿、闭环关键帧间相对位姿(两帧的点云匹配得到)作为观测值,对关键帧位姿进行优化,在没有GPS情况下,精度主要靠回环。
利用当前关键帧scan2map匹配位姿和上个关键帧优化后的位姿(这一次优化的初值)来计算关键帧间相对位姿观测量,实际上这个观测量对位姿起不到优化的作用。
2. 功能说明
2.1. 回调函数:lasercloudinfoHandler
这个函数监听的是/feature/cloud_info,关于这个话题里面包含的内容,我已经在featureExtraction.cpp的总结部分说过了。这里回忆一下,cloud_info是作者自定义的一个特殊的msg类型,包含了当前激光帧的角点集合,平面点集合,一维数组,每根线开始的点和结束点在一维数组中的索引。
那么收到数据,先保存时间戳,然后提取已经在featureExtraction.cpp中被提取的角点和平面点信息,保存到*laserCloudCornerLast和*laserCloudSurfLast中。请记住这两个命名。
频率控制:当前时刻-上一时刻>=0.15s时,才开始调用下列函数:
updateInitialGuess(); extractSurroundingKeyFrames(); downsampleCurrentScan(); scan2MapOptimization(); saveKeyFramesAndFactor(); correctPoses(); publishOdometry(); publishFrames();
2.2. UpdateInitGuess:当前帧初始化
当关键帧集合为空时,用激光帧的imu原始数据角度数据初始化,并且把数据用lastImuTransformation保存(记住这个命名),返回。
假如cloudInfo.odomAvailable=true时,那么就用一个transBack来记录cloudInfo.initialGuessX等信息,(这个信息其实来自于imupreintegration.cpp中发布的imu里程计数据),然后记录增量,在之前系统状态transformTobeMapped的基础上,加上这个增量,再次存入transformTobeMapped。 注意这个transformTobeMapped,这个数据结构,在这个cpp里,我们可以理解为就是它在存储着激光里程计部分的系统状态,包括位置与姿态。
注意,这里有一个lastImuPreTransformation,这个用来保存上一时刻imu里程计的数据,根据它和当前的imu里程计来算增量。不要和lastImuTransformation变量混起来,虽然这俩变量名字长的很像。
然后覆盖lastImuTransformation(在这个case里没用到),返回;
假如cloudInfo.imuAvailable=true,那么进入这个case:
注意,lastImuTransformation在1.1.1和1.1.2中并未用到,只是不断的在替换成最新数据。当cloudInfo.odomAvailable一直是true的时候,程序压根也不会进入到这个case。
但是,凡事总有例外,万一哪里没有衔接好,imu里程计没有及时算出来,那么就导致此时激光帧的位姿没有一个初始化的数据(我们之后是要在初始化的基础上进行优化的),那么之后的优化就无从进行。因此,就要用到这个case。
这里主要思路是用imuRollInit数据来初始化,如果你回顾过imageProjection.cpp部分的总结3.2 那么你应该就会懂,这里的数据来源是原始imu数据的角度信息。那么如果这里有数据,就用lastImuTransformation当成最新的上一时刻数据,当前数据transBack和它算一个增量,然后累积到系统值transformTobeMapped上面去。最后更新覆盖lastImuTransformation,返回。
2.3. extractSurroundingKeyFrames
如果没有关键帧,那就算了,返回;
如果有,就调用extractNearby函数。
关键帧是啥?cloudKeyPoses3D,我们要记住这个变量,虽然到现在为止,我们还不知道它是怎么来的,但是这个东西是怎么获取的,我们在后续必须弄明白。
在这里我先剧透一下:它里面装的是历史的“关键帧”的位置,即x,y,z三个值。需要明确:这里装的绝不是历史的关键帧位置处的点云。而是历史关键帧记录时刻机器人所在的位置。
同理还有一个cloudKeyPoses6D,它比这个3D还多了三个角度信息。之所以要用一个6D一个3D分别来装关键帧,我现在直接揭晓答案:用3D装,是因为我们要根据这个来构建KD树,搜索历史上最近的节点。“最近”指的是距离上最近,即xyz空间坐标最近,和角度无关。而cloudKeyPoses6D,是用来投影点云的,把当前帧点云投影到世界坐标系下,那么投影就必须要用角度信息了,所以作者分别用了一个3D和一个6D来装数据。
2.4. extractNearby函数
使用kd树,搜索当前最近的关键帧,在给定半径内(默认是50m)所有关键帧最近的位置,并把结果返回到pointSearchInd,把距离返回到pointSearchSqDis中。
根据索引pointSearchInd,把相邻关键帧存入到surroundingKeyPoses中。
下采样,装进surroundingKeyPosesDS中,并在原始的surroundingKeyPoses其中找到最近的一个点,替换掉索引。(关于这个,我的理解是,下采样后不太准确了,好几个不同的关键帧可能因为下采样的原因混成了一个,所以要用原始数据对索引进行一个修正,这样以后才方便根据索引投影点云)
顺手把10s内的关键帧cloudKeyPoses3D中的位置也加入到surroundingKeyPosesDS中。
extractCloud:提取边缘和平面点对应的localmap,把surroundingKeyPosesDS传入到函数中:
对输入的surroundingKeyPosesDS进行遍历,找到50m之内的位置,然后用transformPointCloud把对应位置的点云,进行变换到世界坐标系下。
如何变换呢?根据上面提到的cloudKeyPoses6D的位姿,然后把cornerCloudKeyFrame和surfCloudKeyFrame中根据索引找到点云,投影到世界坐标系下。
那么在这里,cornerCloudKeyFrame和surfCloudKeyFrame是什么?之前从来没有出现过。我这里同样进行剧透,它里面存放的是下采样的点云。注意总结1中的*laserCloudCornerLast和*laserCloudSurfLast这两个东西,这是瞬时点云,这个东西会在之后被下采样,然后装入cornerCloudKeyFrame中。
在角点点云和平面点点云被投影到世界坐标系下后,会被加入到laserCloudCornerFromMap和laserCloudSurfFromMap等数据结构中,然后再合出一个pair类型的Container<关键帧号,<角点集合,平面点集合>>。
2.5. downsampleCurrentScan
这部分比较简单,就是对最外层的回调函数中的laserCloudCornerLast之类的东西,进行一个下采样,保存到laserCloudCornerLastDS这些以DS结尾的数据结构中,并且把数目存到laserCloudCornerLastDSNum这种以DSNUM结尾的数据结构中。其实就是代表了当前帧点云的角点/平面点的下采样集合,和数目值。
2.6. Scan2MapOptimization
首先,没有关键帧保存,那就返回,不处理;
如果DSNUM这种记录角点和平面点的数据结构中,发现数目不够多,也不处理;只有在数目足够多的时候才进行处理,默认最少要10个角点,100个平面点。
迭代30次:
边缘点匹配优化:CornerOptimization
平面点匹配优化:SurfOptimization
组合优化多项式系数:combineOptimizationCoeffs
LMOptimization:判断迭代误差是否足够小,如果是true则认为迭代完成,返回;
transformUpdate:原始的imu的rpy,在这里和优化后的激光里程计位姿进行一个加权融合。
接下来,我们依次展开这些函数:
2.7. 边缘点匹配优化:CornerOptimization
把系统状态transformTobeMapped做一个数据格式转换,变成transPointAssociateToMap形式
从当前角点下采样集合laserCloudCornerLastDS进行遍历,找到世界坐标系下最近的5个点,要求小于1m。
求5个样本的均值,协方差矩阵。对协方差矩阵进行特征值分解,如果最大特征值大于次大特征值的3倍,那么就认为构成线。
一旦发现构成线,那么就在均值沿着最大特征向量方向(把它看成线的方向)前后各取一个点(+-0.1 x 方向)。
X0为当前点,X1和X2为“X0附近的5个点一起算出的均值沿方向前后各取的一点”,叉乘计算三点面积a012,x1x2底边长度l12。然后再做一次叉乘,得到X0距离x1,x2连线的垂线段的单位方向向量(la,lb,lc)。并计算点到直线的距离ld2=a012/l12。
用一个鲁棒和函数,使得距离ld2越大,s越小。然后用coeff来保存“鲁棒后”的距离,和“鲁棒后”的点到线的垂线的方向向量。
如果点到直线的距离小于1m,那么存入数据结构,laserCloudOriCornerVec为原始点云,coeffSelCornerVec为鲁棒距离和鲁棒向量,laserCloudOriCornerFlag代表当前点X0 已经找到对应的线。
思考:为什么要加入方向向量呢?是因为这个在优化的偏导数中会被用到。
2.8. 平面点匹配优化:SurfOptimization
和上面的同理,对系统状态量transformTobeMapped进行数据格式转换;
从当前角点下采样集合laserCloudSurfLastDS进行遍历,找到世界坐标系下最近的5个点,要求小于1m。
直接用matA0存储这个5个点,求解Ax+By+Cz+1=0的ABC系数(用QR分解),然后对ABCD,代码中为pa,pb,pc,pd=1进行单位化。
根据点x0到平面的距离 (分母为1)判断是否构成平面。如果有一个大于0.2m则不构成。
pd2为点到平面的距离,也用鲁棒和函数处理,并且比上两次开方(这点我不理解,我猜就是用来鲁棒的,换成1次开方可能也差不多,意义或许不大),然后和角点部分类似,得到s,存入数据结构。
2.9. 组合优化多项式系数:combineOptimizationCoeffs
这个比较简单,就是把CornerOptimization和SurfOptimization中已经确定匹配关系的点提取出来,laserCloudOri统一把角点和平面点装在一起,coeffSel统一装之前计算得到的“鲁棒优化向量”(角点就是点到直线的“鲁棒垂线”,平面点就是点到平面的“鲁棒法线”)。
优化向量会在LMOptimization中进行优化。
LMOptimization判断迭代误差是否足够小,如果是true则认为迭代完成,返回。
构建JtJ*delt_x=-JTf,然后构建MatAtA,matAtB,利用cv:solve提供的QR分解,得到matX,即delta_x。
当特征点缺乏时,状态估计方法会发生退化。特征值小于阈值,则视为退化方向向量。这块的理论,可以参考LOAM SLAM原理之防止非线性优化解退化
更新位姿,判断收敛与否。那么真正的雷达里程计系统状态transformTobeMapped,就是在这里被更新。
2.10. transformUpdate
原始的imu的rpy,在这里和优化后的激光里程计位姿进行一个加权融合。
当imuAvailable=True的时候,并且俯仰角<1.4,那么对位姿和原始imu的rpy做一个加权平均,(权重在配置文件中可以被设置为0.01)。主要是对roll,pitch仅加权平均,并且对z进行一个高度约束(也就是clip,不得超过配置文件中的z_tollerance,这个主要是一个小trick,应对不能飞起来的无人小车用的),更新transformTobeMapped。
2.11. saveKeyFramesAndFactor
之前函数二话不说就用了一些并没有出现过的数据结构,例如什么cloudKeyPoses3D,cornerCloudKeyFrame之类的东西,看完这个函数将明白这些变量是怎么来的。
2.12. saveFrame
计算当前帧和前一帧位姿变换,如果太小不设关键帧。默认是角度<0.2,距离<1m,两者不满足其一就不保存;
2.13. addOdomFactor
这个是要加入激光里程计因子,给图优化的模型gtSAMgraph。在1.5之前别的函数里,如果没有关键帧,直接就跳过了。但是这里不能跳过。
如果暂时还没有关键帧,就把当前激光系统状态transformTobeMapped,打包成一个PriorFactor加入到gtSAMgraph里。如果目前已经有关键帧了,就把最后一个关键帧,和当前状态transformTobeMapped计算一个增量,把这个增量打包成一个BetweenFactor,加入到gtSAMgraph里头去。
initialEstimate代表变量初值,用transformTobeMapped赋值。
2.14. addGpsFactor
GPS的筛选规则为:如果没有GPS信息,没有关键帧信息,首尾关键帧小于5m,或者位姿的协方差很小(x,y的协方差阈值小于25),就不添加GPS。
否则,遍历GPS列表,当前帧0.2s以前的不要,或者GPS的协方差太大了也不要,无效数据也不要。找到正常数据,打包成一个gps_factor,加入gtSAMgraph里面。
2.15. addLoopFactor
这个其实和当前的回调函数无关,因为当前回调函数监听的是/feature/cloud_info信息,回环是由其他线程监控和检测的。那么在这里,它查询回环队列,加入回环因子,就是一个顺手的事情,反正现在要更新优化,那么查一下,如果有候选的等在那里,就顺手加入优化。如果用做饭来比喻这件事,那么另外的回环检测的线程就是相当于另一个人在备菜,这里addLoopFactor相当于是在炒菜,备好了就先炒,没有备好就算了。
gtsam正常更新。如果有回环那就多更新几次。
把cloudKeyPoses3D,cloudKeyPoses6D,分别装上信息,cloudKeyPoses3D代表关键帧的位置,cloudKeyPoses6D代表关键帧的位置+姿态,为什么要有一个3D一个6D呢?6D里不已经包含了3D信息吗?这个问题我在1.2处已经解释过了。
用优化结果更新transformTobeMapped。
cornerCloudKeyFrames,surfCloudKeyFrames装入信息,回顾一下,回调函数开头收到的点云数据为laserCloudCornerLast,laserCloudSurfLast,然后在downsampleCurrentScan处这俩信息被下采样,加上了DS后缀。在这里把它装到cornerCloudKeyFrames和surfCloudKeyFrames中。
回顾:cornerCloudKeyFrames代表关键帧位置处的角点点云,surfCloudKeyFrames代表关键帧位置处的平面点点云。这俩东西就是上面1.2处extractSurroundingKeyFrames用到的内容,cornerCloudKeyFrames通过cloudKeyPoses6D变换到世界系下,被存到laserCloudCornerFromMap里面,这个FromMap又在scan2MapOptimization函数中被设置到kdtreeCornerFromMap这个Kd树里,在cornerOptimization函数里,就是把当前帧的激光点云依据1.1的初值transformTobeMapped,变换到世界坐标系下,再用kdtreeCornerFromMap进行kd搜索,建立匹配关系,优化transformTobeMapped。
updatePath,更新里程计轨迹。把cloudKeyPoses6D传入,保存在globalPath中。不过暂时还没有进行发布。
2.16. correctPoses
如果发现回环的话,就把历史关键帧通通更新一遍。刚刚虽然更新过了,但是结果都是保存在gtsam里面的,cloudKeyPoses3D和cloudKeyPoses6D,这俩保存位置和位姿的变量仍然保留着更新前的关键帧位姿。所以就根据更新结果,把他俩更新一遍。
为什么不更新cornerCloudKeyFrames和surfCloudKeyFrames呢?因为没有必要更新,这俩存的是机器人坐标系下的点云,和机器人在世界系下的位姿是无关的。
2.17. publishOdometry
到此为止,激光里程计部分的transformTobeMapped就不再更新了。
回顾一下transformTobeMapped经历了哪些变换:在1.1部分用imu角度初值或是imu里程计初值赋值,然后在scan2mapOptimization里面根据点到线、点到面的方程进行更新,再在transformUpdate里和原始imu的rpy信息进行一个很小的加权融合(不过这一步我觉得没啥大用),最后在saveKeyFrameAndFactor里面再加入GPS因子和回环因子进行一轮优化。
最后把transformTobeMapped发布出去,其他cpp文件里,接收的“激光里程计”就是这么个东西。也就是lio_sam/mapping/odometry_incremental。
2.18 publishFrames
这个纯粹就是把乱七八糟东西都发布出去,不管有没有用。如果用户需要就可以监听它。
发布关键帧位姿集合,把cloudKeyPoses3D发布成lio_sam/mapping/trajectory
发布局部降采样平面点,把laserCloudSurfFromMapDS(历史默认50m内的点,在extractCloud中被设置),发布为lio_sam/mapping/map_local
发布当前帧的下采样角点和平面点,用优化后的激光里程计位姿transformTobeMapped投影到世界系下发布,/lio_sam/mapping/cloud_registered
发布原始点云经过配准的点云:输入的/feature/cloud_info的cloud_deskewed字段是由featureExtraction.cpp发布的,其cloud_deskewed是源于imageProjection.cpp发布的原始去畸变点云。把它发布到世界坐标系下,然后以/lio_sam/mapping/cloud_registered_raw的形式发布。
发布轨迹,把之前装好在globalPath里面但是还没有发布的轨迹发布出去,名为/lio_sam/mapping/path。
那么到现在,基本上mapOptimization.cpp的内容就结束了,但是还有一些尾巴:
2.14. gpshandle
监听GPS数据,保存到GPS队列里。
2.15. loopinfohandle
监听"lio_loop/loop_closure_detection",订阅来自外部闭环检测程序提供的闭环数据,本程序没有提供,这里实际没用上。
2.16. loopClosureThread
这个线程在主函数里单独开了一个线程,简要说一下:
读取配置文件中是否开启回环检测。
开始无限循环performLoopClosure:
在历史帧中搜索距离关键帧最近,时间间各较远的关键帧(默认是30s以外,15m以内)没找到就返回,如果找到了,结果就放在loopKeyPre当中,loopKeyCur保存最近一个关键帧。
把最近一个关键帧的特征点提出来,放入cureKeyframeCloud里;回环候选帧前后各25帧也提取出来,放入prevKeyframeCloud里。
把prevKeyframeCloud发布出去,名为lio_sam/mapping/icp_loop_closure_history/cloud
调用pcl库的icp轮子,设定阈值,参数,用setInputSource,setInputTarget传入两个点云,用align对齐。成功阈值设定为0.3,成功则存在icp.getFinalTransformation里面。把当前关键帧的点云,用这个结果icp.getFinalTransformation,转换以后,以lio_sam/mapping/icp_loop_closure_corrected_cloud发布出去。
把当前帧的的位姿用icp.getFinalTransformation结果校正一下,把pair<当前,回环>,间隔位姿,噪声用队列存起来,等待addLoopFactor来调用,即上面的部分。
2.17. visualizeLoopClosure
这部分内容没啥好说的,就是用于rviz展示,把关键帧节点和二者的约束用点和线连起来,以lio_sam/mapping/loop_closure_constraints发布出去。
2.18. visualizeGlobalMapThread
这个主要是两块内容:
publishGlobalmap:
把当前关键帧附近1000m(默认)的关键帧找出来(其实也就是全局的了),降采样,变换到世界系下,然后发布为lio_sam/mapping/map_global.
saveMapService:
这个用来保存pcd格式的点云地图。在配置文件中可以设置开启与否,和存储位置。注意,当程序结束时,ctrl+c以后,才会启动保存任务。这个部分的代码,和发布globalmap部分的核心内容基本一致,反正就是把cornerCloudKeyFrames,surfCloudKeyFrames用cloudKeyPoses6D变换到世界系下,分别保存角点pcd和平面点pcd,以及全局(合起来)的pcd文件。
3. 代码
#include "utility.h"
#include "lio_sam/cloud_info.h"
#include "lio_sam/save_map.h"
#include <gtsam/geometry/Rot3.h>
#include <gtsam/geometry/Pose3.h>
#include <gtsam/slam/PriorFactor.h>
#include <gtsam/slam/BetweenFactor.h>
#include <gtsam/navigation/GPSFactor.h>
#include <gtsam/navigation/ImuFactor.h>
#include <gtsam/navigation/CombinedImuFactor.h>
#include <gtsam/nonlinear/NonlinearFactorGraph.h>
#include <gtsam/nonlinear/LevenbergMarquardtOptimizer.h>
#include <gtsam/nonlinear/Marginals.h>
#include <gtsam/nonlinear/Values.h>
#include <gtsam/inference/Symbol.h>
#include <gtsam/nonlinear/ISAM2.h>
using namespace gtsam;
using symbol_shorthand::X; // Pose3 (x,y,z,r,p,y)
using symbol_shorthand::V; // Vel (xdot,ydot,zdot)
using symbol_shorthand::B; // Bias (ax,ay,az,gx,gy,gz)
using symbol_shorthand::G; // GPS pose
/**
* 6D位姿点云结构定义
*/
struct PointXYZIRPYT
{
PCL_ADD_POINT4D
PCL_ADD_INTENSITY;
float roll;
float pitch;
float yaw;
double time;
EIGEN_MAKE_ALIGNED_OPERATOR_NEW
} EIGEN_ALIGN16;
POINT_CLOUD_REGISTER_POINT_STRUCT (PointXYZIRPYT,
(float, x, x) (float, y, y)
(float, z, z) (float, intensity, intensity)
(float, roll, roll) (float, pitch, pitch) (float, yaw, yaw)
(double, time, time))
typedef PointXYZIRPYT PointTypePose;
class mapOptimization : public ParamServer
{
public:
// gtsam
NonlinearFactorGraph gtSAMgraph;
Values initialEstimate;
Values optimizedEstimate;
ISAM2 *isam;
Values isamCurrentEstimate;
Eigen::MatrixXd poseCovariance;
ros::Publisher pubLaserCloudSurround;
ros::Publisher pubLaserOdometryGlobal;
ros::Publisher pubLaserOdometryIncremental;
ros::Publisher pubKeyPoses;
ros::Publisher pubPath;
ros::Publisher pubHistoryKeyFrames;
ros::Publisher pubIcpKeyFrames;
ros::Publisher pubRecentKeyFrames;
ros::Publisher pubRecentKeyFrame;
ros::Publisher pubCloudRegisteredRaw;
ros::Publisher pubLoopConstraintEdge;
ros::Subscriber subCloud;
ros::Subscriber subGPS;
ros::Subscriber subLoop;
ros::ServiceServer srvSaveMap;
std::deque<nav_msgs::Odometry> gpsQueue;
lio_sam::cloud_info cloudInfo;
// 历史所有关键帧的角点集合(降采样)
vector<pcl::PointCloud<PointType>::Ptr> cornerCloudKeyFrames;
// 历史所有关键帧的平面点集合(降采样)
vector<pcl::PointCloud<PointType>::Ptr> surfCloudKeyFrames;
// 历史关键帧位姿(位置)
pcl::PointCloud<PointType>::Ptr cloudKeyPoses3D;
// 历史关键帧位姿
pcl::PointCloud<PointTypePose>::Ptr cloudKeyPoses6D;
pcl::PointCloud<PointType>::Ptr copy_cloudKeyPoses3D;
pcl::PointCloud<PointTypePose>::Ptr copy_cloudKeyPoses6D;
// 当前激光帧角点集合
pcl::PointCloud<PointType>::Ptr laserCloudCornerLast;
// 当前激光帧平面点集合
pcl::PointCloud<PointType>::Ptr laserCloudSurfLast;
// 当前激光帧角点集合,降采样,DS: DownSize
pcl::PointCloud<PointType>::Ptr laserCloudCornerLastDS;
// 当前激光帧平面点集合,降采样
pcl::PointCloud<PointType>::Ptr laserCloudSurfLastDS;
// 当前帧与局部map匹配上了的角点、平面点,加入同一集合;后面是对应点的参数
pcl::PointCloud<PointType>::Ptr laserCloudOri;
pcl::PointCloud<PointType>::Ptr coeffSel;
// 当前帧与局部map匹配上了的角点、参数、标记
std::vector<PointType> laserCloudOriCornerVec;
std::vector<PointType> coeffSelCornerVec;
std::vector<bool> laserCloudOriCornerFlag;
// 当前帧与局部map匹配上了的平面点、参数、标记
std::vector<PointType> laserCloudOriSurfVec;
std::vector<PointType> coeffSelSurfVec;
std::vector<bool> laserCloudOriSurfFlag;
map<int, pair<pcl::PointCloud<PointType>, pcl::PointCloud<PointType>>> laserCloudMapContainer;
// 局部map的角点集合
pcl::PointCloud<PointType>::Ptr laserCloudCornerFromMap;
// 局部map的平面点集合
pcl::PointCloud<PointType>::Ptr laserCloudSurfFromMap;
// 局部map的角点集合,降采样
pcl::PointCloud<PointType>::Ptr laserCloudCornerFromMapDS;
// 局部map的平面点集合,降采样
pcl::PointCloud<PointType>::Ptr laserCloudSurfFromMapDS;
// 局部关键帧构建的map点云,对应kdtree,用于scan-to-map找相邻点
pcl::KdTreeFLANN<PointType>::Ptr kdtreeCornerFromMap;
pcl::KdTreeFLANN<PointType>::Ptr kdtreeSurfFromMap;
pcl::KdTreeFLANN<PointType>::Ptr kdtreeSurroundingKeyPoses;
pcl::KdTreeFLANN<PointType>::Ptr kdtreeHistoryKeyPoses;
// 降采样
pcl::VoxelGrid<PointType> downSizeFilterCorner;
pcl::VoxelGrid<PointType> downSizeFilterSurf;
pcl::VoxelGrid<PointType> downSizeFilterICP;
pcl::VoxelGrid<PointType> downSizeFilterSurroundingKeyPoses; // for surrounding key poses of scan-to-map optimization
ros::Time timeLaserInfoStamp;
double timeLaserInfoCur;
float transformTobeMapped[6];
std::mutex mtx;
std::mutex mtxLoopInfo;
bool isDegenerate = false;
cv::Mat matP;
// 局部map角点数量
int laserCloudCornerFromMapDSNum = 0;
// 局部map平面点数量
int laserCloudSurfFromMapDSNum = 0;
// 当前激光帧角点数量
int laserCloudCornerLastDSNum = 0;
// 当前激光帧面点数量
int laserCloudSurfLastDSNum = 0;
bool aLoopIsClosed = false;
map<int, int> loopIndexContainer; // from new to old
vector<pair<int, int>> loopIndexQueue;
vector<gtsam::Pose3> loopPoseQueue;
vector<gtsam::noiseModel::Diagonal::shared_ptr> loopNoiseQueue;
deque<std_msgs::Float64MultiArray> loopInfoVec;
nav_msgs::Path globalPath;
// 当前帧位姿
Eigen::Affine3f transPointAssociateToMap;
// 前一帧位姿
Eigen::Affine3f incrementalOdometryAffineFront;
// 当前帧位姿
Eigen::Affine3f incrementalOdometryAffineBack;
/**
* 构造函数
*/
mapOptimization()
{
// ISM2参数
ISAM2Params parameters;
parameters.relinearizeThreshold = 0.1;
parameters.relinearizeSkip = 1;
isam = new ISAM2(parameters);
// 发布历史关键帧里程计
pubKeyPoses = nh.advertise<sensor_msgs::PointCloud2>("lio_sam/mapping/trajectory", 1);
// 发布局部关键帧map的特征点云
pubLaserCloudSurround = nh.advertise<sensor_msgs::PointCloud2>("lio_sam/mapping/map_global", 1);
// 发布激光里程计,rviz中表现为坐标轴
pubLaserOdometryGlobal = nh.advertise<nav_msgs::Odometry> ("lio_sam/mapping/odometry", 1);
// 发布激光里程计,它与上面的激光里程计基本 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章


















 622
622

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









