






一、下载编译安装Livox-SDK2
git clone https://github.com/Livox-SDK/Livox-SDK2.git
cd ./Livox-SDK2/
mkdir build
cd build
cmake ..
make -j
sudo make install二、下载编译Livox ROS Driver 2
mkdir -p ~/catkin_ws/src
cd ~/catkin_ws/src
git clone https://github.com/Livox-SDK/livox_ros_driver2.git
#git不下来的去官网download然后解压
cd livox_ros_driver2
source /opt/ros/noetic/setup.sh #换成你自己的ros版本
./build.sh ROS1 三、连接mid-360
先确保雷达已经连接了电脑,打开设置->网络->有线,会看到已连接状态,点击小齿轮,设置为以下内容:

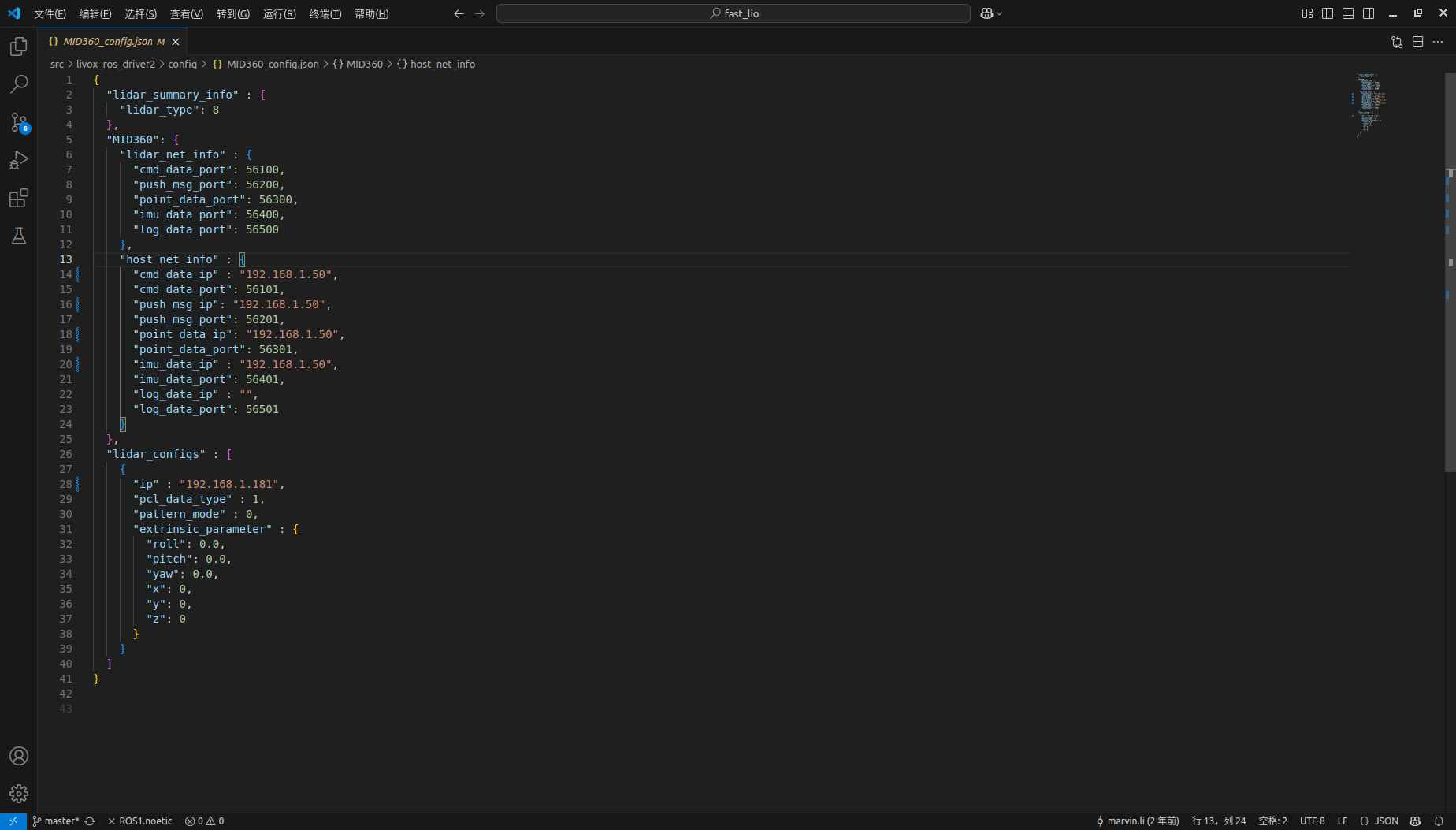
四、修改livox_ros_driver2/config/MID360_config.json文件
"host_net_info"字段,IP全改为192.168.1.50
"lidar_configs":ip改为192.168.1.1XX XX是mid360激光雷达二维码下面的一串数字的最后两位
五、检测验证是否连上
cd Livox-SDK2/build/samples/livox_lidar_quick_start
./livox_lidar_quick_start ../../../samples/livox_lidar_quick_start/mid360_config.json若结果为下图:
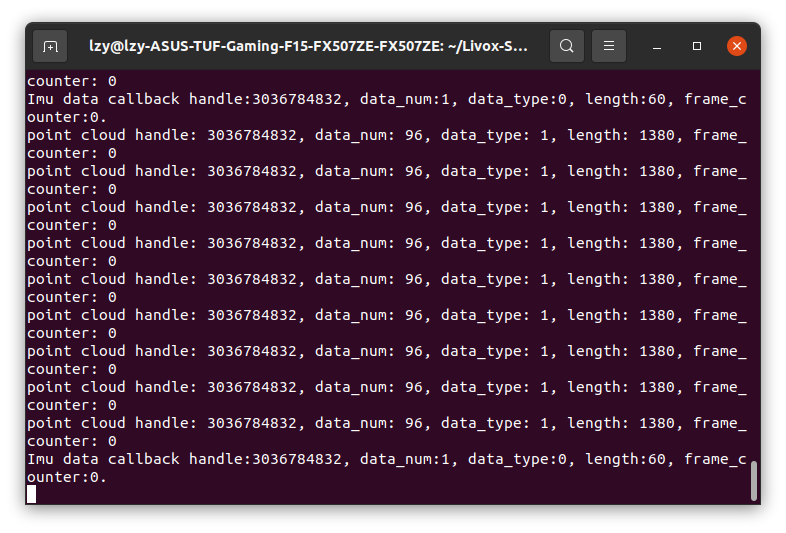
表示雷达和电脑已经连接上并且能检测到雷达
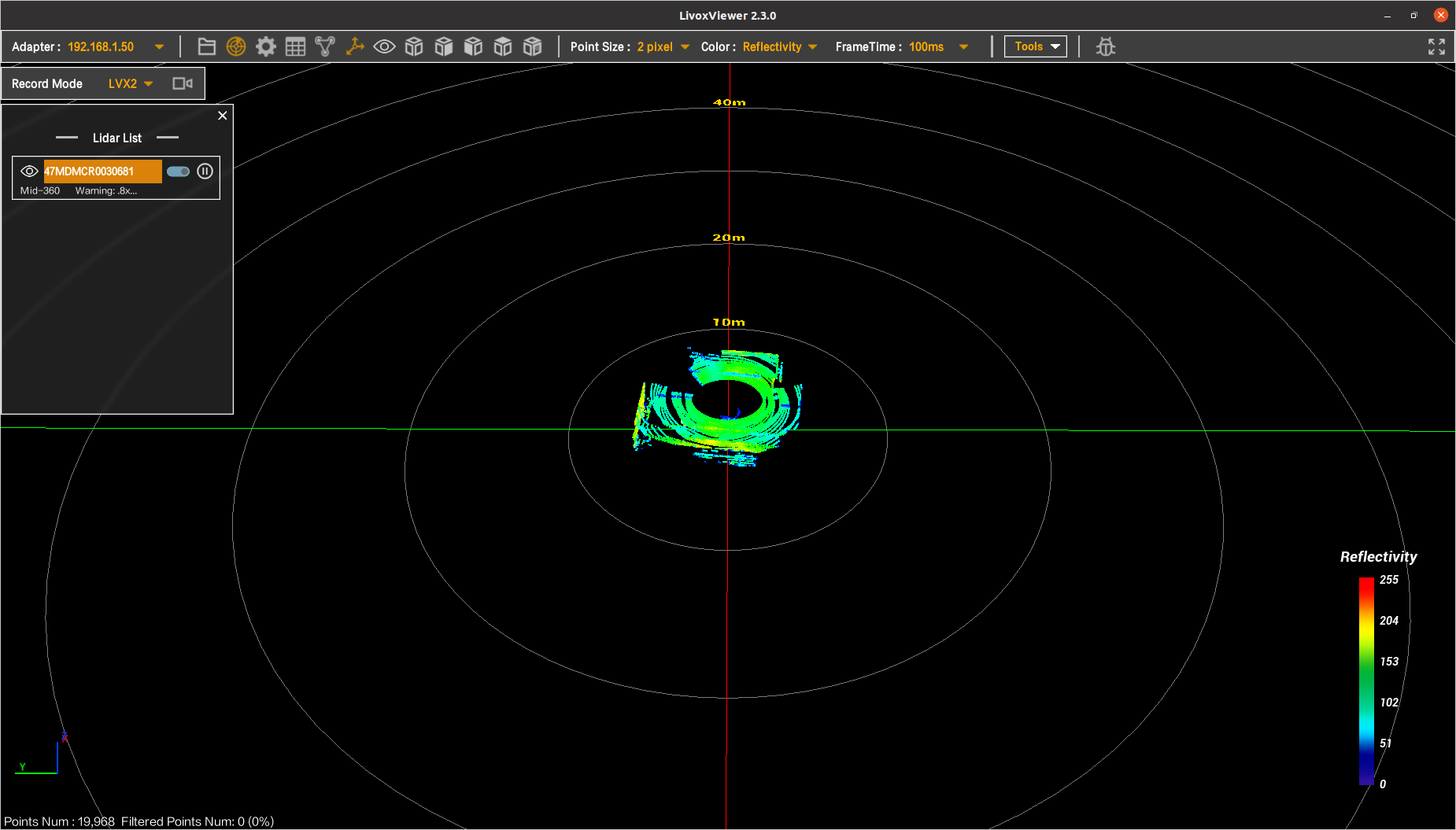
六.运用livoxViwer查看
访问官网www.livoxtech.com,下载livox Viwer2,在根目录下终端输入:
./LivoxViewer2.sh
结果如下图:
也可以通过rviz查看,直接终端输入:
roslaunch livox_ros_driver2 rviz_MID360.launch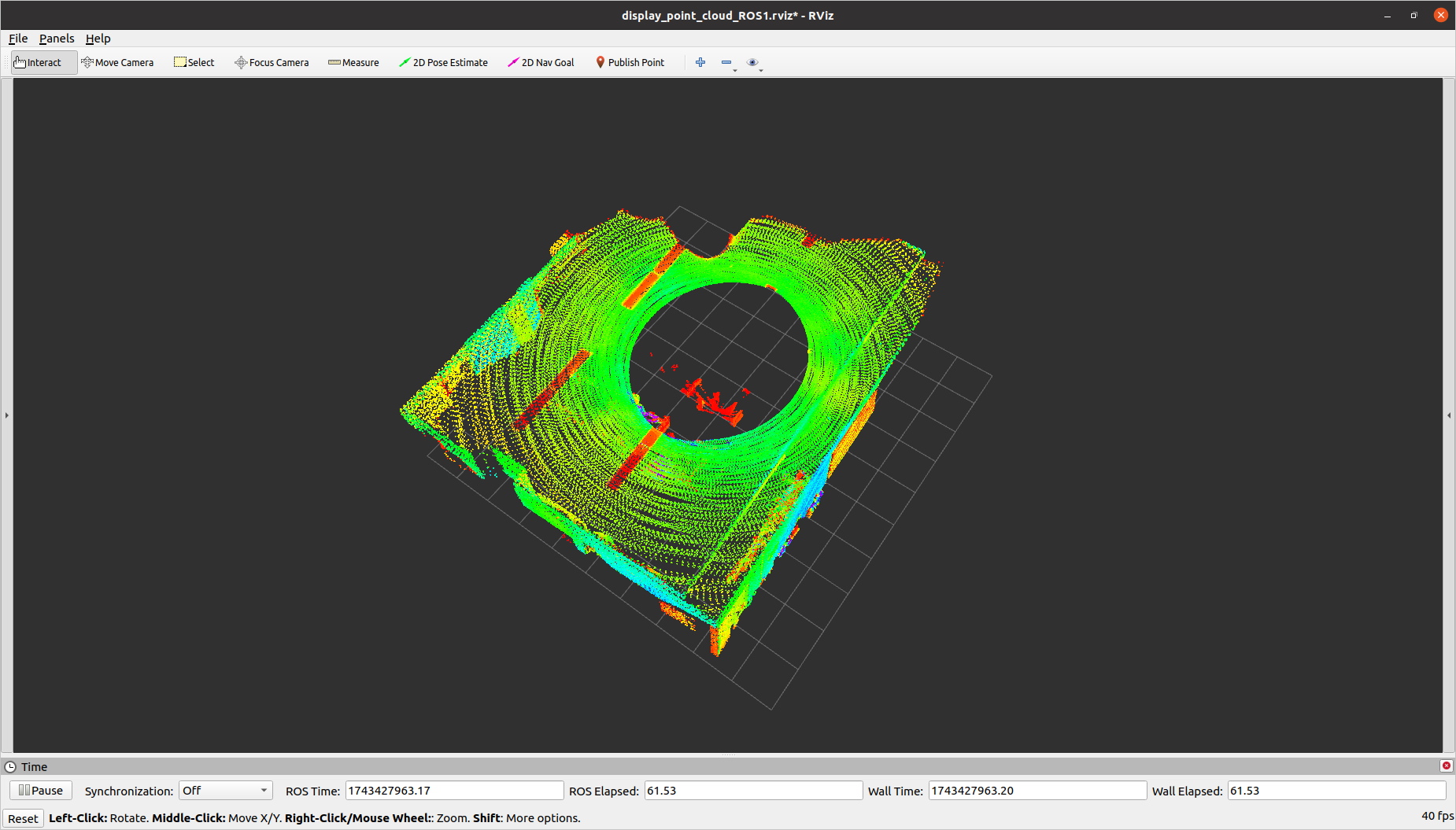
参考教程:
虚拟机ubuntu20.04上配置livox激光雷达(通过LivoxViewer2使用)_livox viewer2-CSDN博客
ubuntu使用Livox mid360激光雷达_mid360雷达管理-CSDN博客
补充:运用mid360跑fast_lio
打开两个终端,分别运行:
source devel/setup.bash
roslaunch livox_ros_driver2 msg_MID360.launch
source devel/setup.bash
roslaunch fast_lio mapping_mid360.launch

















 2121
2121

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









