






提示:文章写完后,目录可以自动生成,如何生成可参考右边的帮助文档
前言
rosbag是ROS(机器人操作系统)中用于记录和回放数据的工具。录制数据可以帮助开发者在不同时间重新播放和分析实验数据,便于调试和验证算法。通过记录和回放数据,可以在离线状态下对数据进行处理和分析,避免了实时系统的限制,提高了开发效率。通过rosbag,开发者可以更好地管理和利用数据资源,加速机器人系统的开发和优化过程。下面介绍rosbag相关的录制和播放相关的指令与操作。
一、rosbag的介绍
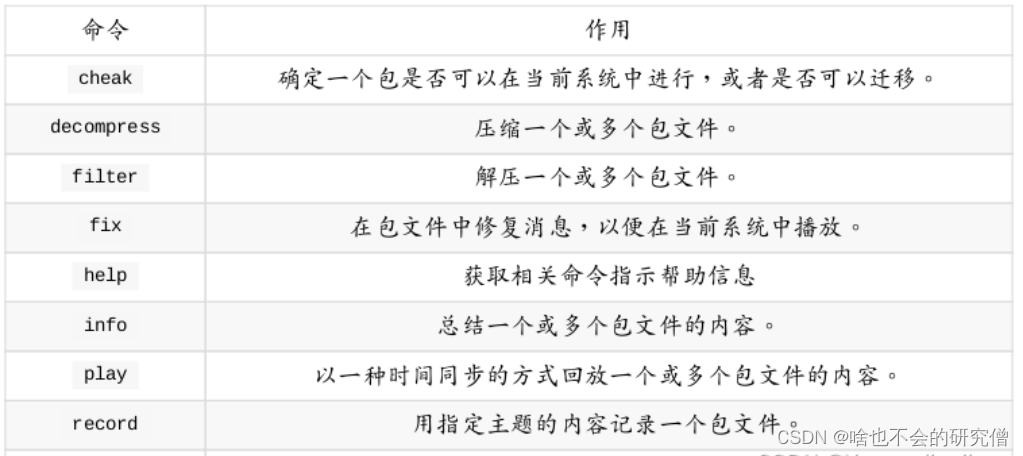
rosbag是机器人操作系统中用于记录、存储和回放ROS消息。它允许开发者在机器人操作过程中捕捉传感器数据和其他消息,并在之后的调试和测试过程中回放这些数据,常用的指令如下表所示:
二、rosbag的在线和离线录制
具体的录制过程如下:
1. 打开相应的传感器驱动,或离线播放rosbag,生成ros话题数据
2. 使用如下指令,列出话题名称
rostopic list
3. 录制话题数据
(1) 录制全部话题数据
rosbag record -a
注意:对于一些经过过压缩的数据是无法录制的,会出现报错
(2) 录制部分话题的数据
rosbag record <话题1> <话题2> <话题3> ...
比如录制三个imu的话题,如下:
rosbag record /imu /imu2 /imu3
(2) 指定生成数据包的名字
终端输入:
rosbag record -O filename.bag /topic_name 指定生成数据包的名字filename.bag
其中filename.bag为你想要保存的bag的名字,/topic_name为要录制的话题
即可查看所录制的包的消息话题,消息数据类型等幸喜
三、rosbag的播放相关的指令
1. 原速播放特定的rosbag
在rosbag文件所在的目录,终端输入:
rosbag play <rosbag的名字>
2. 以指定的倍速播放特定的rosbag
rosbag play -r n <rosbag的名字>
其中,n为指定的播放倍速
3. 播放rosbag中指定话题
rosbag play <rosbag名字> --topics <话题名字>
4. 重映射rosbag中话题的名字
rosbag play aaaa.bag /imu:=/imu2
表示将aaaa.bag中话题名称/imu转为/imu2
5. 暂停rosbag的播放
点击键盘的空格键即可暂停rosbag的播放,再次点击空格将即可恢复播放
6. 其他的播放操作说明
rosbag play -s n <rosbag的名字>
rosbag play -d n <rosbag的名字>
rosbag play -u n<rosbag的名字>
rosbag play -s n -u m <rosbag的名字>
参数说明:
-s n :从指定时间(n = 指定时间s)开始回放rosbag
-d n :延时指定时间(n = 延时时间s)开始回放rosbag
-u n :播放指定时间(n = 指定秒数)的rosbag
-s n -u m :从指定时间(n = 开始时间s)开始播放指定时间(m = 指定播放时间s)的rosbag
四、其他rosbag和ros话题相关的指令
1. 查看rosbag包含的话题数据名称、消息类型、包的时间等信息
rosbag info <rosbag>
2. 终端发布话题数据
rostopic pub -r 1 /data_0 std_msgs/Float32 0.02
解释:
-r 1:表示发布的话题的频率,1表示一秒发一次
/data_0:表示发布的话题名称
std_msgs/Float32:表示发布的话题数据类型
0.02:表示具体的话题数据
参考:
https://blog.csdn.net/zardforever123/article/details/131134826?ops_request_misc=&request_id=&biz_id=102&utm_term=rosbag%E7%9A%84%E4%BD%BF%E7%94%A8&utm_medium=distribute.pc_search_result.none-task-blog-2allsobaiduweb~default-4-131134826.142v100pc_search_result_base2&spm=1018.2226.3001.4187
总结
ROS中的rosbag是一个强大的数据记录和回放工具。开发者可以使用rosbag记录实时数据,并在之后任意时间重新播放这些数据,以进行调试和算法验证。通过在离线状态下处理和分析数据,rosbag减少了对实时系统的依赖。以上的教程介绍使用rosbag的过程中录制播放和ros话题信息相关的指令与操作。

















 277
277











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











