









Ubuntu16.04_kinetic安装gazebo8
最近一直在做SLAM方面的东西,做测试的时候总是把车搬来搬去,线接来接去很是麻烦,就想用gazebo进行场地的仿真训练,奈何安装过程中全是坑
一开始有个gazebo9,我的上边有7/8/9三个版本的gazebo,但是9版本的好像不太完善
在ros-kinetic里边找不到9的包我也是很无奈,然后就去github找源码
wiki:http://wiki.ros.org/gazebo_ros_pkgs
github:https://github.com/ros-simulation/gazebo_ros_pkgs
然后编译的时候报错,好像是因为我之前安装cartographer的时候protobuf已经升级到3.4.0,然后Google到可以源码安装,但是最后操作一番之后发现还是对这个protobuf库的错误提示,未找到定义。
那既然gazebo8这么全,为什么我还要浪费精力去安装9呢?
在某几个CSDN博客上看到,说当你安装好之后直接运行gazebo,如果出来gazebo是黑屏的,就是没装好,如果是一片空白的那种就是安装好了,天真的我信以为真了!!!!!!

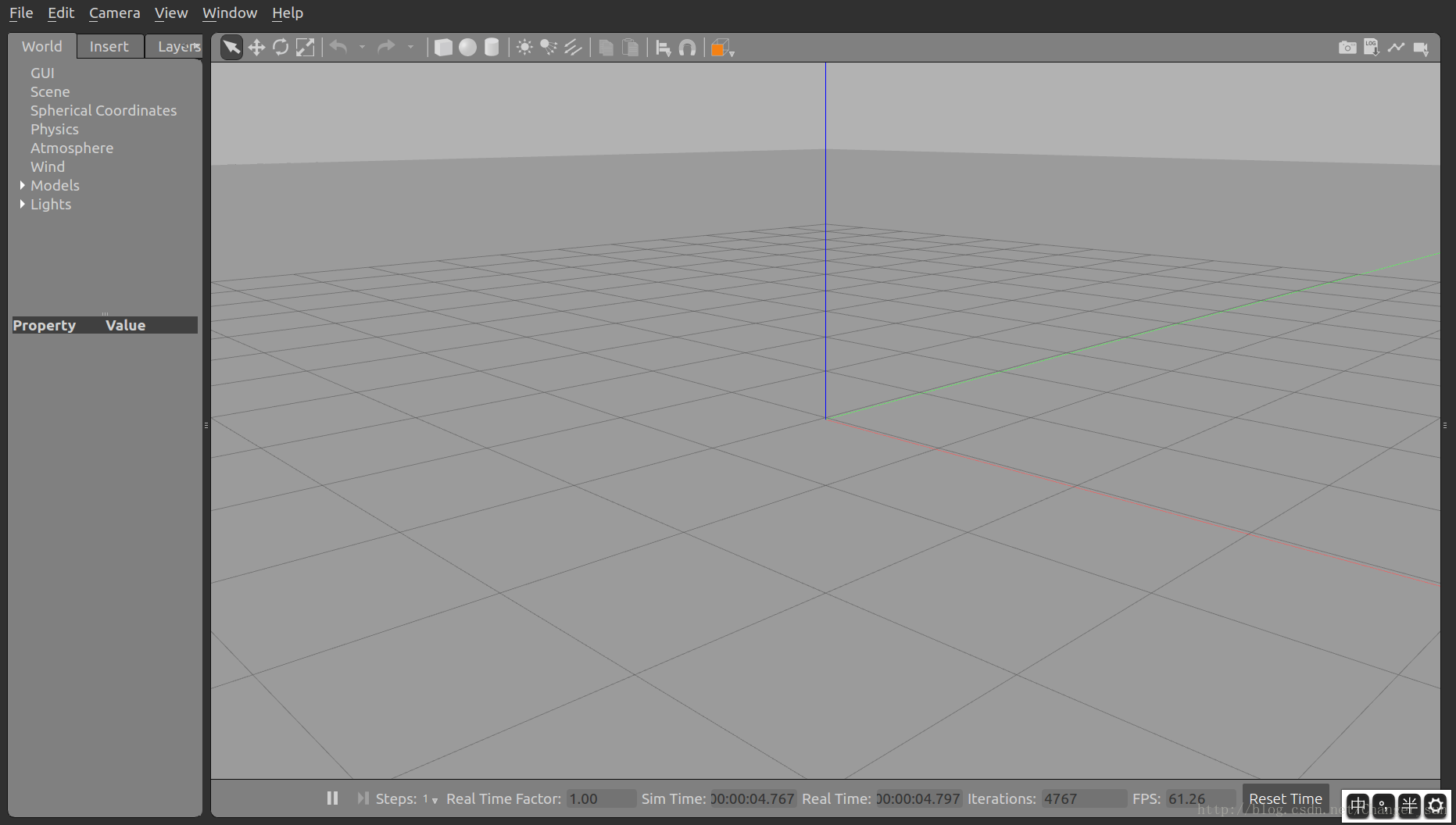
传说中的安装好的界面是这个样子的,当时我配好8了以后,运行出来是一片黑的,然后果断下载,换了9,当把9装好了之后(只是装了gazebo,没有装gazebo_ros)然后运行gazebo的时候出来就是一片白色的,但是9的问题是没有ros接口。来来回回装了卸载 卸载了再装,弄了五六个小时之后我还是把gazebo换回了8
在我绝望的时候,看着它黑屏,等了大概两分钟,突然 ,白了,然后就一切正常!!!!!!
然后运行 roslaunch gazebo_ros empty_world.launch提示有错误,没有gzserver和gzclient,如下图
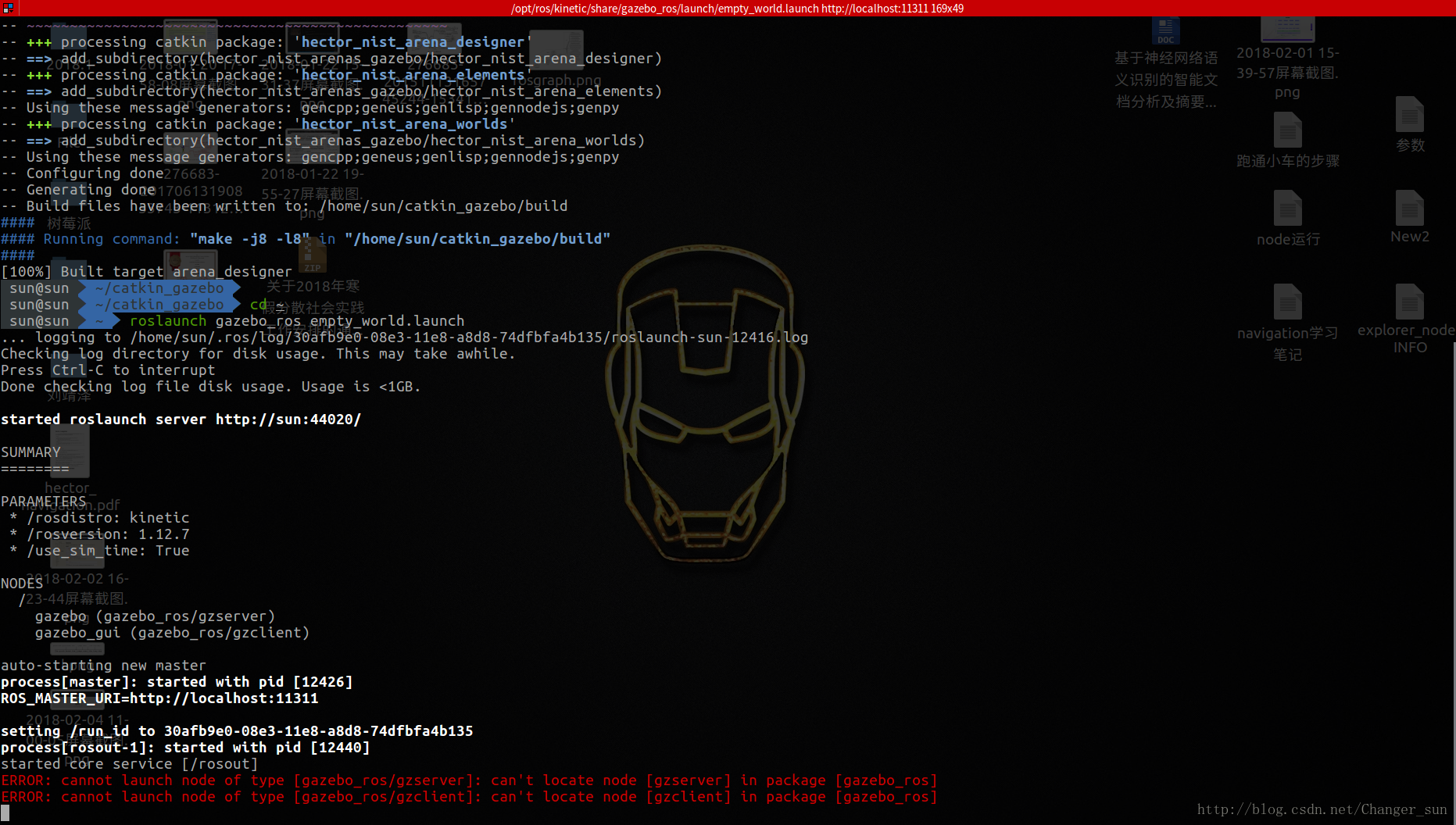
但是奇怪的是which gzserver能找得到的,也就是安装上了
经过搜索,找到了答案,运行下边的这两行代码,建一个软连接过去,这个问题就解决了
sudo ln -s /opt/ros/indigo/lib/gazebo_ros/gzserver /opt/ros/indigo/share/gazebo_ros/gzserver
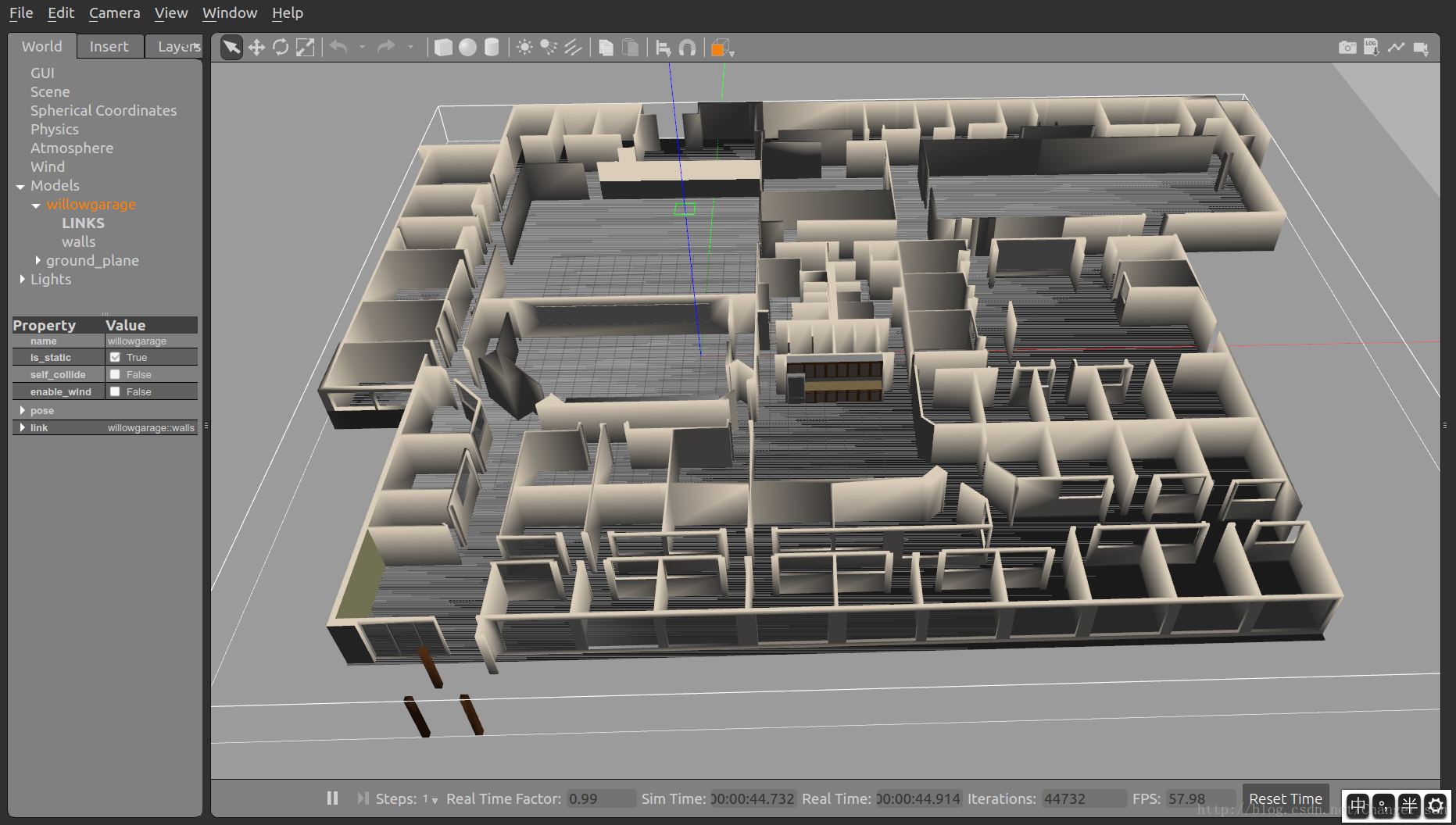
sudo ln -s /opt/ros/indigo/lib/gazebo_ros/gzclient /opt/ros/indigo/share/gazebo_ros/gzclient难道说是我电脑太垃圾了?这个图黑屏等了得有5分钟才出来,不要相信什么黑屏就是没安装好,我宁愿相信是我电脑渣的原因
roslaunch gazebo_ros willowgarage_world.launch
参考文章
https://answers.ros.org/question/245030/error-while-spawning-my-robot-in-gazebo-using-gazebo_ros/















 2706
2706

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









