







 本文介绍了在ROS环境中使用AMCL(Autonomous Mobile Robot Localization)进行机器人定位的方法。首先,需要在amcl_demo.launch文件中调整地图名称。接着,在RVIZ中使用'2D Pose Estimate'设定机器人初始位置。随后,通过teleop_twist_keyboard控制机器人移动,AMCL将逐步确定机器人位置。观察绿色粒子云收缩情况来评估定位效果。若地图特征不明显,可能影响定位成功率,可通过调整AMCL参数实现全局初始化。
本文介绍了在ROS环境中使用AMCL(Autonomous Mobile Robot Localization)进行机器人定位的方法。首先,需要在amcl_demo.launch文件中调整地图名称。接着,在RVIZ中使用'2D Pose Estimate'设定机器人初始位置。随后,通过teleop_twist_keyboard控制机器人移动,AMCL将逐步确定机器人位置。观察绿色粒子云收缩情况来评估定位效果。若地图特征不明显,可能影响定位成功率,可通过调整AMCL参数实现全局初始化。
在上一节建图的基础上,讨论下如何定位。
运行如下命令,启动定位程序
roslaunch dashgo_nav amcl_demo.launch
rosrun dashgo_bringup teleop_twist_keyboard.py
roslaunch turtlebot_rviz_launchers view_navigation.launch注意: 在amcl_demo.launch需要修改地图名
在rviz的图形界面点击”2D Pose Estimate”,然后在地图中指定机器人的大致位置。
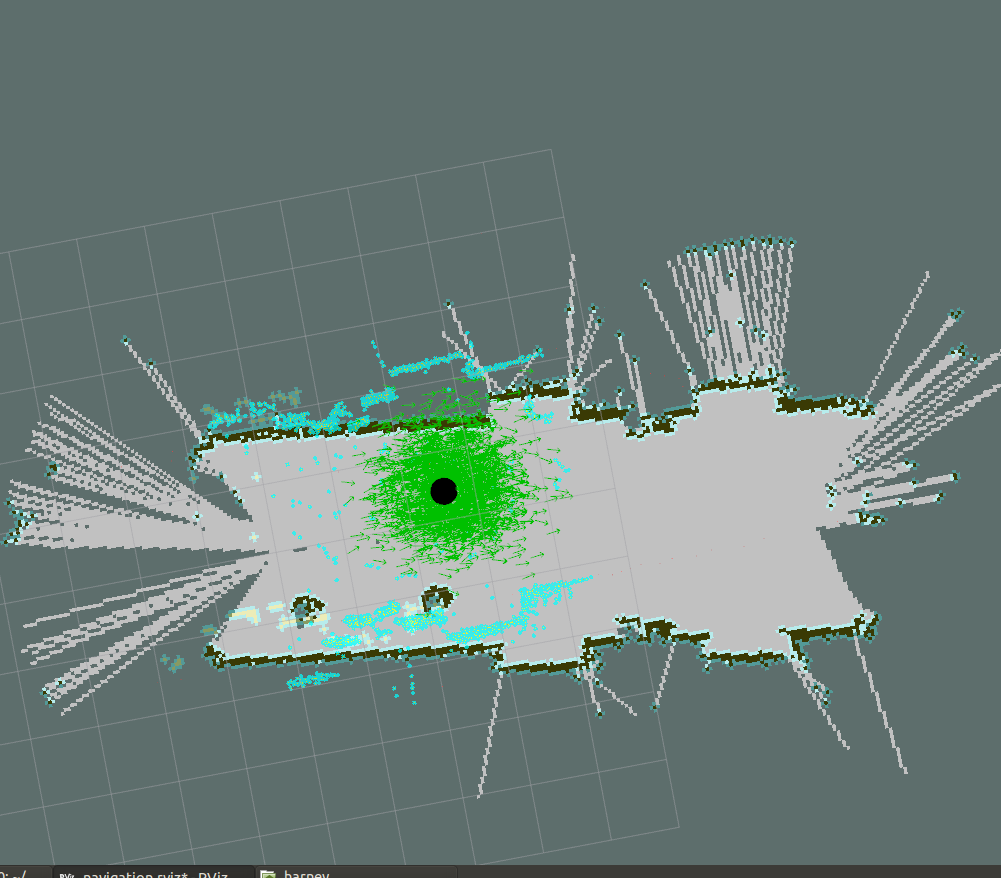
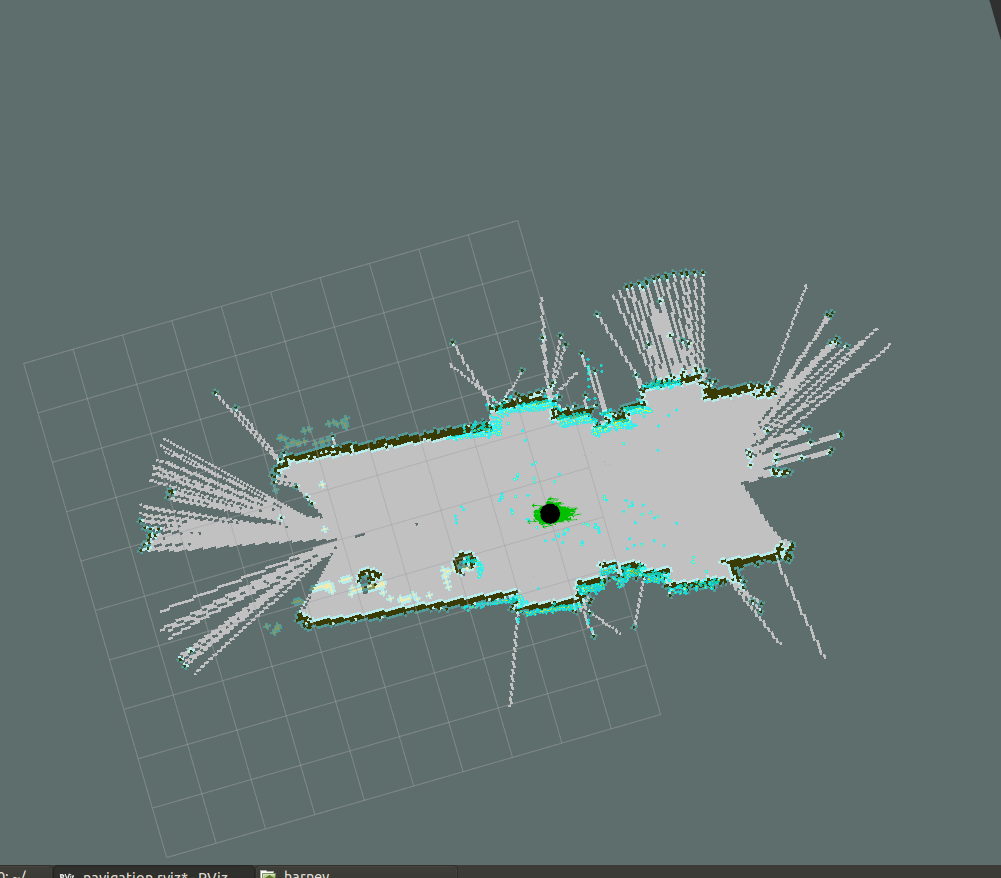
在teleop_twist_keyboard的终端小范围前后左右移动小车,小车逐步确定它自身的位置。
判断小车是否定位成功,主要看小车周围绿色的点是否收缩到一起。
如果不想给定初始位置,可以通过在amcl节点中修改如下参数的值,使粒子洒满地图的各个角落。如果地图的特征不明显(比如走廊),可能定位失败。
<param name= 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章


















 1828
1828

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









