







 本文介绍了如何结合gazebo和rviz进行机器人仿真,重点讲解了使用gazebo2rviz插件将gazebo中的.sdf模型显示在rviz中的步骤,包括官方用法、实践过程遇到的问题及解决方法,帮助读者掌握gazebo与rviz联动的技巧。
本文介绍了如何结合gazebo和rviz进行机器人仿真,重点讲解了使用gazebo2rviz插件将gazebo中的.sdf模型显示在rviz中的步骤,包括官方用法、实践过程遇到的问题及解决方法,帮助读者掌握gazebo与rviz联动的技巧。
在做机器人仿真的时候,通常用到gazebo和rviz两个软件,并且有时需要两者配合起来使用。gazebo用来模拟机器人的物理属性,rviz用来数据可视化。
假如现在我在gazebo世界中有一个完整的机器人模型,格式为.sdf。有没有办法能够将这个模型显示在rviz中呢? 办法是有的,使用gazebo2rviz插件。
wiki链接
通过TM和Marker插件自动将所有适用于gazebo中模拟的sdf文件描述的实体导入rviz。
github链接
官方用法举例
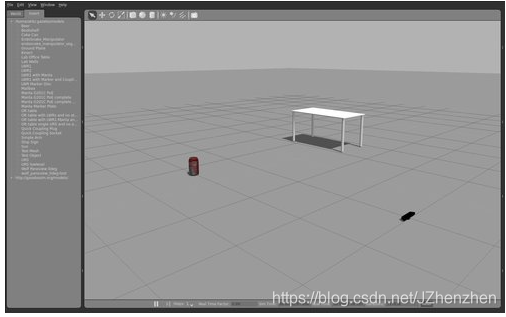
启动gazebo并添加一些对象
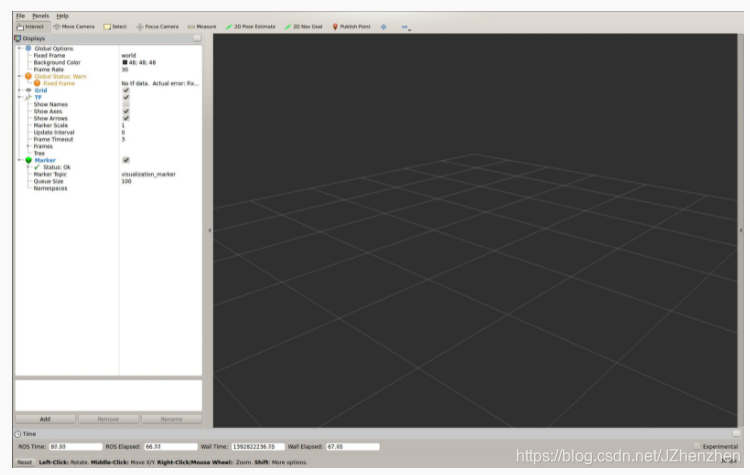
启动rviz,添加TF和Marker插件
启动gazebo2rviz节点:roslaunch gazebo2rviz gazebo2rviz.launch
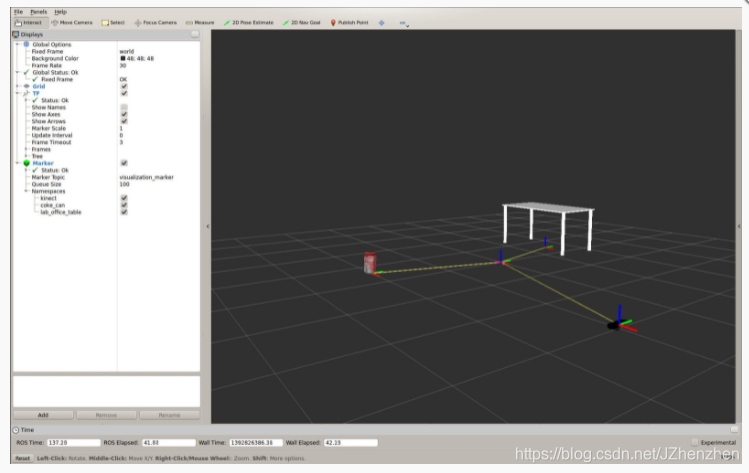
现在,gazebo中发生的任何事情,比如移动、添加、删除模型,rviz中同时能够看到。
 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章


















 3006
3006

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









