







驱动包:https://github.com/ethz-asl/ethzasl_xsens_driver
相关介绍:http://wiki.ros.org/xsens_driver
注意:目前看到最新的版本好像仍然是groovy,博主系统的版本是ubuntu14.04 ros版本是indigo,但是编译可以没有问题,放心下载。
下载到相应的工作空间中,
(1)检查IMU的线是否都连接到电脑上,一个USB供电线,还有一个是串口线,我用了一个串口转USB,这两条线都要连接到电脑上
(2)运行:
roslaunch xsens_driver xsens_driver.launch 编译会报错,但是不要紧张!
仔细看报什么错误,90%的可能是缺少gps-common包
(3)
下载gps-common包:
sudo apt-get install ros-indigo-gps-common (4)然后再运行
roslaunch xsens_driver xsens_driver.launch 还是会报错!仍然不要紧张!!
仔细看应该是一个permission denied 也就是你需要给你的串口赋权限
如果你用的是USB转串口,那么赋权限的命令为:
sudo chmod 777 /dev/ttyUSB0当然,如果你同时使用了多个串口转USB,那么你需要到/dev/文件下下查看你的串口端口号,
如果你直接使用的串口,那么命令应该为
sudo chmod 777 /dev/ttyS0同理,需要根据你的设备确认下你的串口号
(5)第三次运行
roslaunch xsens_driver xsens_driver.launch 哈哈,终于没有错误了,对不
(6)如果我想查看它发布的消息怎么办?
在终端运行:
rqt应该会出现如下画面:
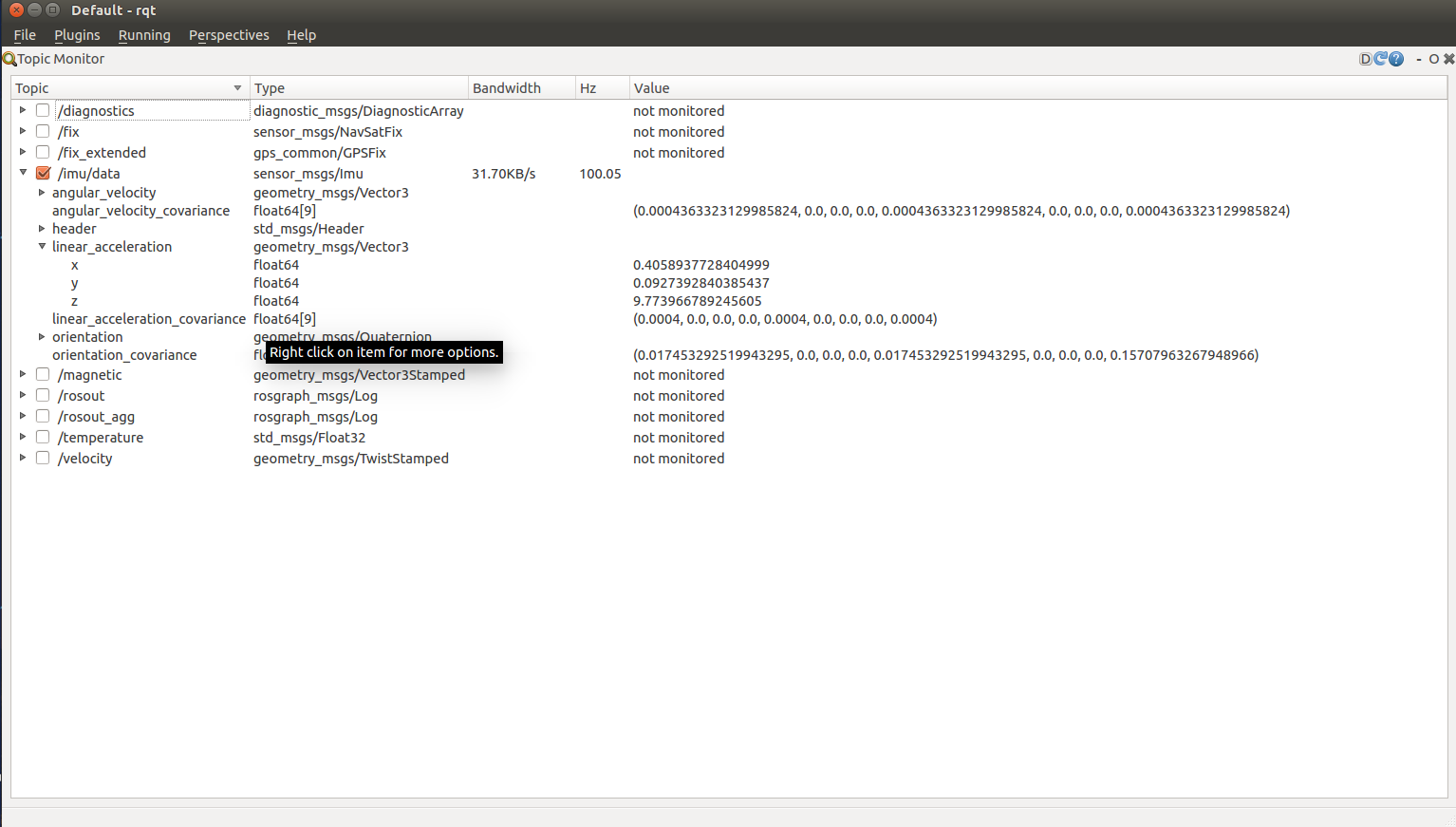
所有发出的topic都能在里面看到了,注意只有选中topic,才能有数据输出哦~
至此,搞定,欢迎交流~















 1780
1780

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









