







参考官方:http://wiki.ros.org/melodic/Installation/Ubuntu
官方中文:http://wiki.ros.org/cn/kinetic/Installation/Ubuntu
首先ubuntu不同的版本对应ROS不同的版本,我们需要在安装过程中找到对应的版本进行在终端里的安装操作;
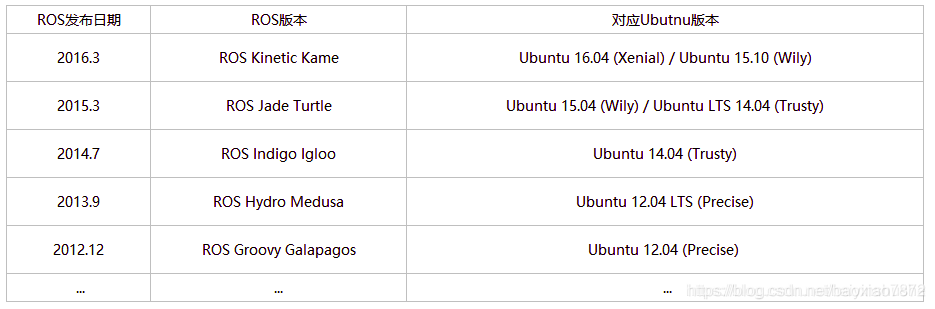 Melodic 主要对应:Ubuntu Artful (17.10), Bionic (18.04 LTS) 以及Debian Stretch
Melodic 主要对应:Ubuntu Artful (17.10), Bionic (18.04 LTS) 以及Debian Stretch
设置你的电脑可以从 packages.ros.org 接收软件.
sudo sh -c 'echo "deb http://packages.ros.org/ros/ubuntu $(lsb_release -sc) main" > /etc/apt/sources.list.d/ros-latest.list'
添加 keys
sudo apt-key adv --keyserver 'hkp://keyserver.ubuntu.com:80' --recv-key C1CF6E31E6BADE8868B172B4F42ED6FBAB17C654
最新密钥
sudo apt-key adv --keyserver keyserver.ubuntu.com --recv-keys F42ED6FBAB17C654
安装
sudo apt update
桌面完整版: (推荐) : 包含ROS、rqt、rviz、机器人通用库、2D/3D 模拟器、导航以及2D/3D感知
sudo apt install ros-melodic-desktop-full
桌面版安装: 包含ROS、rqt、rviz以及通用机器人函数库。
sudo apt install ros-melodic-desktop
基础版安装: (简版) 包含ROS核心软件包、构建工具以及通信相关的程序库,无GUI工具
sudo apt install ros-melodic-ros-base
单个软件包安装: 你也可以安装某个指定的ROS软件包(使用软件包名称替换掉下面的PACKAGE):
sudo apt-get install ros-kinetic-PACKAGE
例如:
sudo apt-get install ros-kinetic-slam-gmapping
初始化rosdep
在开始使用ROS之前你还需要初始化rosdep。rosdep可以方便在你需要编译某些源码的时候为其安装一些系统依赖,同时也是某些ROS核心功能组件所必需用到的工具。
sudo rosdep init
rosdep update
环境配置
echo "source /opt/ros/kinetic/setup.bash" >> ~/.bashrc
source ~/.bashrc
小海龟测试
roscore
rosrun turtlesim turtlesim_node
rosrun turtlesim turtle_teleop_key
总结:国内网比较慢,最好用国外源














 1万+
1万+











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









