




 本文详细介绍了如何进行相机标定,包括标定的必要性、准备步骤如标定板的选择和摄像头调焦,以及使用ROS的camera_calibration工具进行标定的详细过程。通过标定,可以纠正相机的成像误差,适用于尺寸测量和视觉SLAM等应用。文章还提供了标定结果的保存和使用方法,以及如何利用image_proc进行图像矫正。
本文详细介绍了如何进行相机标定,包括标定的必要性、准备步骤如标定板的选择和摄像头调焦,以及使用ROS的camera_calibration工具进行标定的详细过程。通过标定,可以纠正相机的成像误差,适用于尺寸测量和视觉SLAM等应用。文章还提供了标定结果的保存和使用方法,以及如何利用image_proc进行图像矫正。
参考链接:camera_calibration - ROS Wiki
为什么要标定
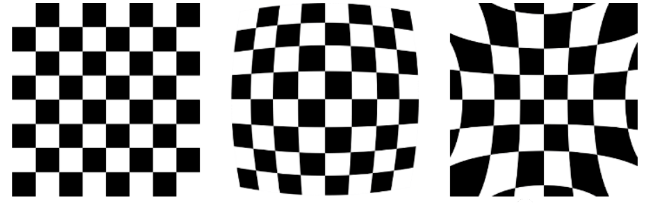
普通相机成像误差的主要来源有两部分,第一是相机感光元件制造产生的误差,比如成
像单元不是正方形、歪斜等;第二是镜头制造和安装产生的误差,镜头一般存在非线性的径
向畸变。
在对相机成像和三维空间中位置关系对应比较严格的场合(例如尺寸测量、视觉 SLAM
等)就需要准确的像素和物体尺寸换算参数,这参数必须通过实验与计算才能得到,求解参
数的过程就称之为相机标定。
标定前准备
标定板
在执行摄像头标定前,需要先准备一块标定板。
标定板有两种获得方法,第一种是采购成品的标定板,A4纸大小的标定板通常价格在300~400的样子。

如果不想采购,可以使用打印机将下面的文件按照1:1打印在A4纸上,然后贴在一块纯平的版上,例如亚克力板。
打印的标定板缺点在于,第一打印机的精度有限,边缘可能会产生模糊,另外就是在粘贴时很难做到极高的平整度,这两项都会对标定结果产生一定的影响,但是优点时便宜易得。
摄像头调焦
标定只针对手动对焦的相机,自动对焦的相机由于焦距变化,难以形成固定的标定参数。
相机在标定前,需要调整好焦距(拧镜头&#
 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章


















 484
484

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









