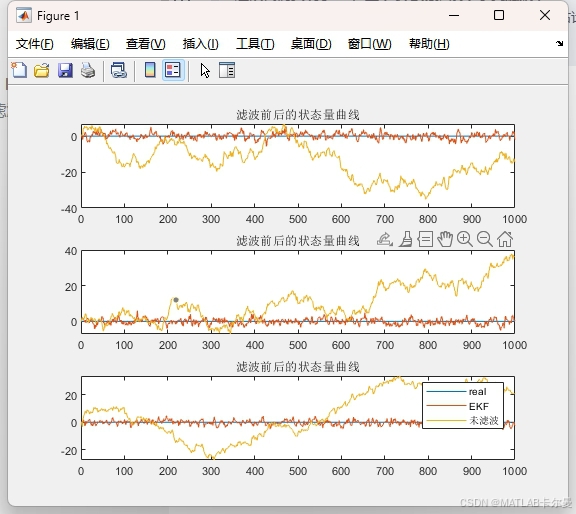
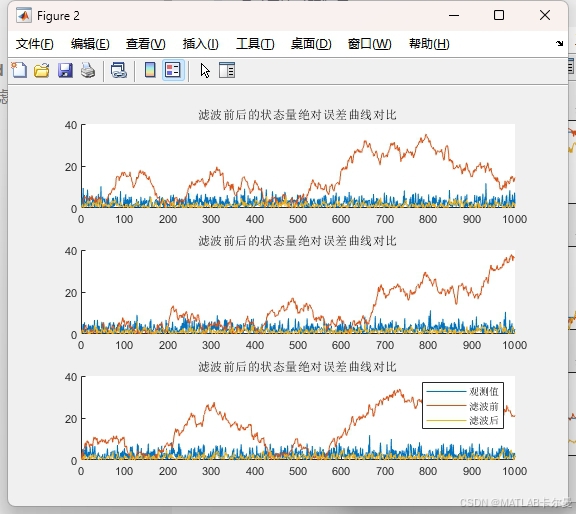
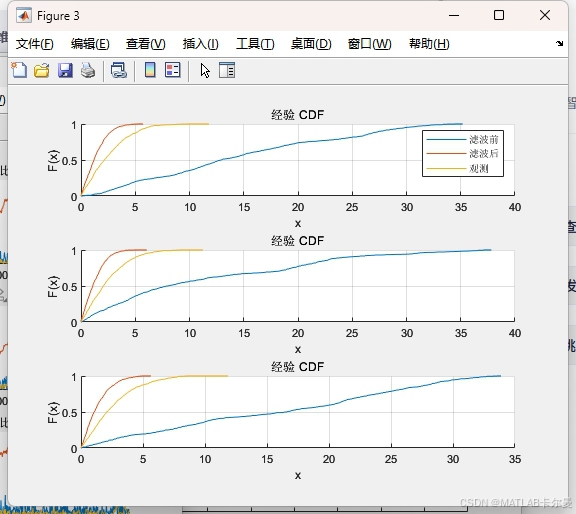
这段代码实现了一个 三维状态的扩展卡尔曼滤波 (Extended Kalman Filter, EKF) 算法。通过生成过程噪声和观测噪声,对真实状态进行滤波估计,同时对比了滤波前后状态量的误差和误差累积分布曲线。 文章目录 运行结果 MATLAB源代码 程序介绍 代码逻辑结构 代码详细介绍 初始化部分 运动模型 扩展卡尔曼滤波 (EKF) 绘图 误差输出 运行结果 状态量曲线: 误差曲线: 误差CDF曲线(越靠近左上表示误差整体越小): MATLAB源代码








 超级会员免费看
超级会员免费看

 订阅专栏 解锁全文
订阅专栏 解锁全文



















 339
339

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言


 被折叠的 条评论
为什么被折叠?
到【灌水乐园】发言
被折叠的 条评论
为什么被折叠?
到【灌水乐园】发言








