







本文所述代码实现了一个一维容积卡尔曼滤波(CKF)算法,针对强非线性系统的状态估计问题。通过构建包含周期性驱动项和非线性饱和效应的动态模型(
2.5x/(1+x²) + 8cos(1.2t)),以及非线性观测方程(x²/20),展示了CKF在无需雅可比矩阵线性化的情况下,利用确定性采样点(容积点)精确传递状态分布的能力。代码对比了滤波前后的状态误差,验证了CKF在抑制噪声和提升估计精度上的有效性。
代码介绍
初始化与动态模型
- 噪声设置:一维过程噪声协方差
Q=0.01和观测噪声协方差R=1,生成对应的高斯噪声序列w和v。 - 非线性状态方程:
X_next = X_prev + 2.5*X_prev/(1+X_prev²) + 8*cos(1.2t)
包含非线性饱和项(2.5x/(1+x²))和周期性驱动项(8cos(1.2t)),模拟复杂动态系统。 - 非线性观测方程:
Z = X²/20 + v,体现状态到观测的非线性映射。
CKF算法实现
- 容积点生成:基于Cholesky分解和参数
lambda=sqrt(L)(L为状态维度),生成2L个对称容积点,覆盖状态分布的均值和协方差。 - 预测步骤:
- 容积点通过非线性状态方程传播,计算预测均值
x1_mean和协方差P1_cov。 - 叠加过程噪声协方差
Q,更新预测协方差。
- 容积点通过非线性状态方程传播,计算预测均值
- 观测更新:
- 预测观测容积点并计算均值
x2_mean和协方差P2_cov。 - 计算互协方差
P3_cov和卡尔曼增益K,修正状态估计与协方差。
- 预测观测容积点并计算均值
结果分析与可视化
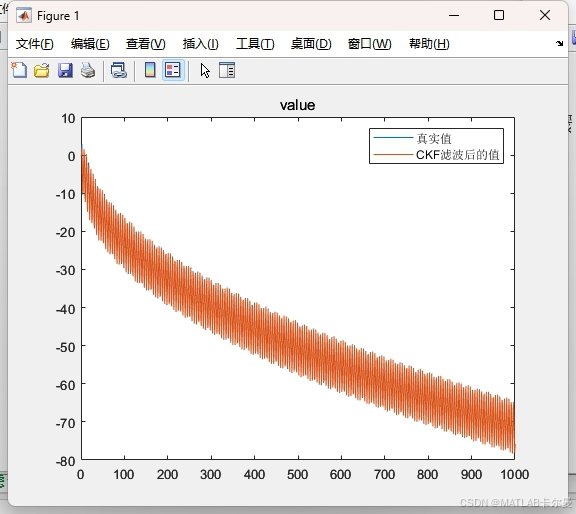
- 状态对比图:显示真实值、CKF估计值与未滤波值的时序对比,直观反映滤波效果。
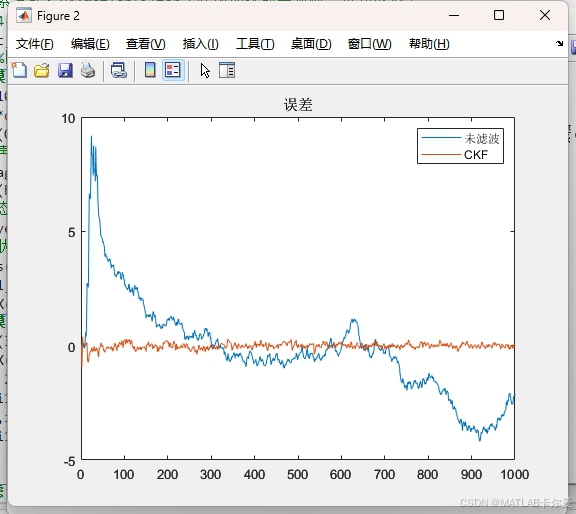
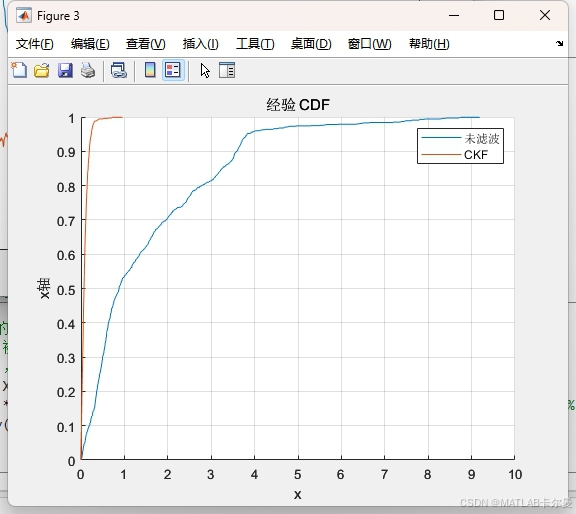
- 误差分析:绘制绝对误差曲线和累积分布函数(CDF),定量评估CKF的噪声抑制能力。
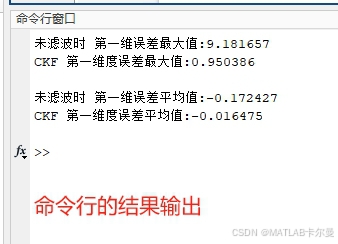
- 统计指标输出:输出最大误差和平均误差,验证CKF在降低估计偏差上的优势。
代码特点
- 非线性鲁棒性:通过容积点直接传递非线性模型,避免EKF的线性化误差,尤其适用于强非线性系统(如含饱和、周期性扰动的场景)。
- 确定性采样:基于容积规则生成固定数量的采样点(
2L个),计算效率高于UKF的2L+1点,且无需调整alpha参数。 - 数值稳定性:采用Cholesky分解确保协方差矩阵正定性,防止滤波发散。
- 轻量化实现:一维状态简化代码结构,便于理解CKF核心流程。
改进方向
- 多维扩展:修改状态维度
L,适配多自由度机械臂、多目标跟踪等场景。 - 自适应噪声协方差:引入噪声统计特性在线估计,提升对时变噪声的鲁棒性。
- 算法对比:与EKF、UKF在同一模型下对比精度与计算效率。
- 硬件部署优化:利用MATLAB Coder生成C代码,嵌入嵌入式系统实时运行。
核心公式说明
-
容积点生成:
KaTeX parse error: Expected 'EOF', got '_' at position 9: \text{X_̲cuba} = [\mu + …
其中chol(P)为协方差矩阵的Cholesky分解,确保采样点对称分布。 -
协方差更新:
P pred = ∑ W i ( X pred ( i ) − μ ) ( X pred ( i ) − μ ) T + Q P_{\text{pred}} = \sum W_i (X_{\text{pred}}^{(i)} - \mu)(X_{\text{pred}}^{(i)} - \mu)^T + Q Ppred=∑Wi(Xpred(i)−μ)(Xpred(i)−μ)T+Q
通过加权容积点误差更新预测协方差,叠加过程噪声影响。
该代码为理解CKF算法提供了简洁的一维实现框架,通过非线性动态与观测模型的设计,展示了其在复杂系统状态估计中的潜力。用户可通过调整噪声参数(Q、R)和动态模型,快速适配具体工程问题。
运行结果
状态量曲线(两个颜色离得近,不容易看出来区别,区别在误差图里面更明显):
- 状态误差曲线:
-
滤波前后CDF图像:
-
命令行输出结果的截图:
MATLAB源代码
部分代码如下:
% CKF的一维滤波程序例程
% 2025-04-29/Ver1
clear;clc;close all; %清空工作区、命令行,关闭小窗口
rng(0); %固定随机种子
%% 滤波模型初始化
t = 1:1:1000;% 定义时间序列
Q = 0.01*diag([1]);% 设置过程噪声协方差矩阵
w = sqrt(Q)*randn(size(Q,1),length(t)); %生成
% 观测噪声协方差矩阵和观测噪声
R = 1*diag([1]);
v = sqrt(R)*randn(size(R,1),length(t));
% 初始状态估计协方差矩阵
P0 = 1*eye(1);
% 初始化状态向量
...
完整代码下载链接:https://download.csdn.net/download/callmeup/90719233
如需帮助,或有导航、定位滤波相关的代码定制需求,请点击下方卡片联系作者


















 372
372

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











