




按照教程用moveit_setup_assistant生成配置包,打开终端运行roslaunch demo.launch,报错
RLException: error loading <rosparam> tag:
file does not exist [3]
XML is <rosparam command="load" file="3" ns="manipulator"/>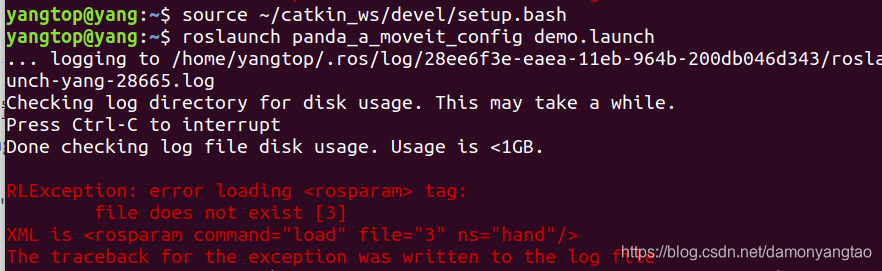
之后去编辑模型
在Planning Groups选项中,Kin.parameters file空着,group default planner选择RRT
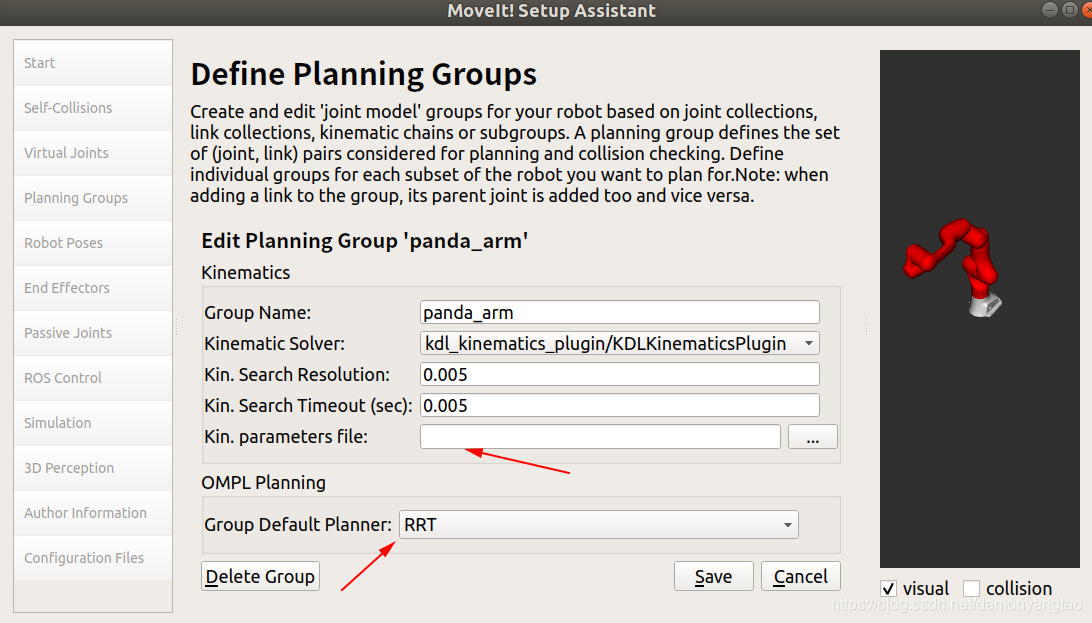
保存,再重新生成功能包,覆盖旧的功能包。
问题解决
参考:https://blog.csdn.net/anyingdaozhimi/article/details/109247029



















 3558
3558

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









