







DBSCAN聚类算法,是基于密度的聚类算法。该算法需要两个参数。
labels = np.array(pcd.cluster_dbscan(eps=0.02, min_points=10, print_progress=True))
入参:
eps: 定义到聚类邻居的距离
min_points: 定义形成聚类所需的最小点数。
出参:
该函数返回一个标签,其中标签-1表示噪音。
该算法定义以选中的点开始蔓延,邻居点距离<=0.02米,最小有10个点就可以构成一个簇;适用于原始点云分隔的比较开的,有明显界限的点云。
该算法定义以选中的点开始蔓延,邻居点距离<=0.02米,最小有10个点就可以构成一个簇;适用于原始点云分隔的比较开的,有明显界限的点云。
官方例子:
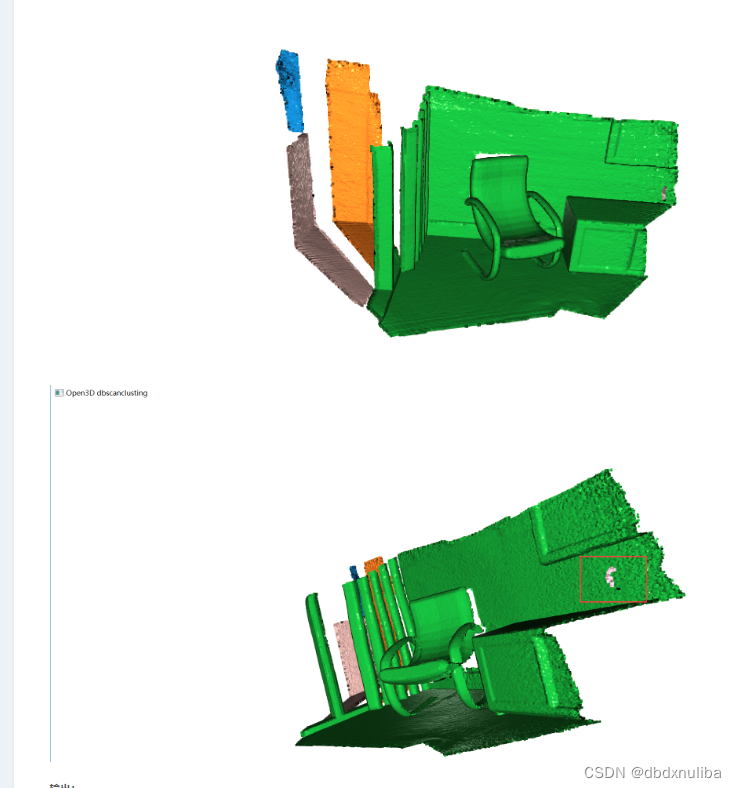
测试例子:
cluster_dbscan_eps: 0.01
min_points: 50














 3472
3472











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









