







SerDes是Serializer/Deserializer的缩写,即串行器和解串器。由于同轴线的传输延迟几乎可以忽略不计(ns级别),相当于将原来只能短距离传输的高速并行信号(MIPI/I2C/CLK等)的传输距离延长,真正做到高带宽、低延迟、长距离的数据传输。
- SerDes的串行-解串可以通过数模电路或者FPGA来实现。
- 在商用领域,出于性价比的考量,往往会使用独立IC芯片来实现这个功能,GMSL是SerDes的一种。GMSL就是由Maxim公司开发的一系列串行-解串芯片的集合。
- GMSL适用于视频、音频和控制信号的传输,使用50Ω同轴电缆或100Ω屏蔽双绞线电缆,传输距离可达15m或更长。目前基于GMSL架构的通信协议最高可实现单通道6Gbps的速率(参考USB3.0仅有2.5Gbps)

文章目录
产品发展
GMSL技术经历了很长的发展时间,第一代的GMSL从2003年开始,最高支持3Gbps的传输速率,足够传输1百万-3百万像素(1080p/30fps)的视频流数据。从2017年之后,GMSL2代技术出现,传输带宽已经提升至6Gbps,可轻松传输8百万像素(4K/30fps)的视频流数据。

Maxim目前同时提供两代的GMSL产品,分别是GMSL1以及GMSL2,其中部分GMSL2产品兼容GMSL1。目前常见的GMSL串行-解串芯片如表1所示。其中兼容GMSL1/2的器件,既可以接入GMSL1也可以接入GMSL2。例如:
a) MAX9296解串器,既可以接入MAX96701(GMSL1)也可以接入MAX96717(GMSL2);
b) MAX9295A串行器,既可以接入MAX9286(GMSL1),也可以接入MAX96712(GMSL2);
| 串行器 | 解串器 | ||
|---|---|---|---|
| GMSL1 | MAX96701/MAX96715 | MAX9286 | |
| 12bit DVP IN 1 SIO OUT@1.76Gbps | 4IN 1OUT@MIPI 1.5Gbps | ||
| GMSL1/2 兼容 | MAX9295A | MAX9296 | MAX96722 |
| 4-MIPI IN 1 SIO OUT@6Gbps | 2IN 2OUT@MIPI 2.5Gbps | 4IN 1OUT@MIPI 2.5Gbps | |
| GMSL2 | MAX96717/MAX96717F | MAX96712 | |
| 4-MIPI IN 1 SIO OUT@6Gbps/3Gbps | 4IN 1OUT@MIPI 2.5Gbps |
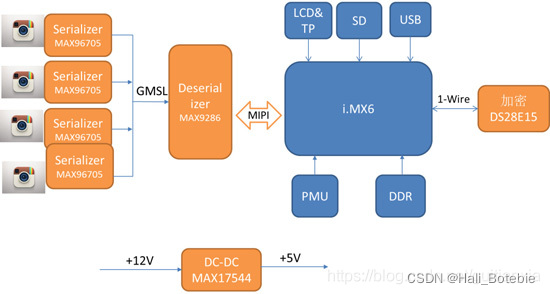
1 Jetson Xavier平台
以Jetson Xavier为代表的Arm架构下的SoC系统,通常没有直接的GMSL接口,而是提供MIPI信号接口,因此需要通过外挂解串板的方式来实现,以下方的配置为例介绍。
硬件连接方式如图4所示,摄像头包含Sensor(IMX390)和串行器(MAX9295),两路摄像头通过GMSL Link同轴线(Coax Cable)连接到转接板(MAX9296 Deserializer Board),转接板再通过排线(MIPI White Cable)接入到Jetson Xavier开发板的CSI Port。

硬件架构如图5所示:
- Sensor(IMX390)接口为MIPI-CSI,数据格式为1080p/30fps/RAW12
- 每路摄像头搭配1个MAX9295串行器(Serializer)
- 两路GMSL Link共同连接到解串器MAX9296
- MAX9296解串器接入到Jetson的CSI port(以Port A为例)

驱动层的结构如图6所示,驱动最上层是v4l2的架构,是Linux系统下的通用相机驱动框架。中间层是sensor驱动,用于控制视频流的开关、设置图像参数等。最底层是MAX9295/9296的驱动,负责拉通数据链路。

Sensor驱动程序会在设备启动(Device boot)的时候,配置串行器-解串器的参数,建立起数据链路(data streaming pipeline)。一旦数据链路建立起来后,就可以分别对串行器、解串器、Sensor配置寄存器参数,控制它们的工作模式,或进行数据流的开关操作等。
2 PC电脑/工控机
PC/工控机主要运行在x86平台,这类系统通常接口有:USB/以太网/PCIE等。USB3.0的传输带宽在1Gbps – 2.5Gbps左右,以太网的带宽在100Mbps – 1000Mbps之间,PCIE的带宽高于10Gbps。
如表2所示,1M(100万像素) - 8M(8百万像素)摄像头的数据传输带宽在655Mbps – 4.4Gbps。从带宽的限制来看,USB3.0最高只能支持到2M,以太网最高支持到1M,只有PCIE可以满足所有的传输需求。
| 像素 | 传输带宽 | USB3.0 | Ethernet (以太网) | PCIE |
|---|---|---|---|---|
| 1M | 655Mbps | √ | √ | √ |
| 2M | 1.3Gbps | √ | × | √ |
| 8M | 4.4Gbps | × | × | √ |
表2 不同接口的传输带宽
PCIE 其工作原理如下:
-
摄像头(Sensor+Serdes)的图像数据通过GMSL同轴连接线传输到采集卡的解串芯片(DeSerdes, MAX9296)上
-
解串芯片将数据通过MIPI/IIC传输到FPGA,FPGA解析数据流
-
FPGA通过PCIE将数据存放至DDR4内存中
-
调用SDK获取内存数据

3 DRIVE Xavier
https://docs.nvidia.com/drive/driveworks-3.5/supported_sensors.html

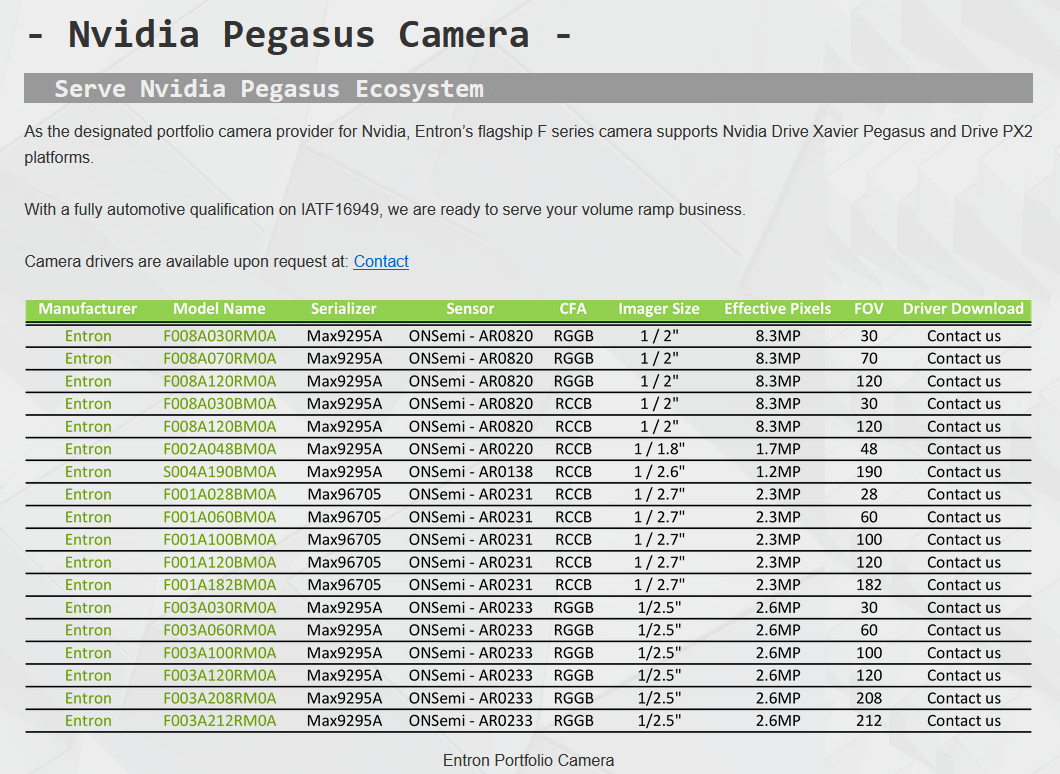
使用 Entron 的F001A100BM0A,这是侧向2MP的相机
4 TDA4 GMSL1 自主域控 MAX9286与MAX96705
5 寒武纪行歌 SD5223C 开发板 max96712
GMSL1方案: 3Gbps
串行器解串器max96705和max96712,gms1通信,HIM参数的互相之间的设置;

GMSL2方案: 6Gbps



6 orin
https://developer.nvidia.cn/drive/ecosystem-orin
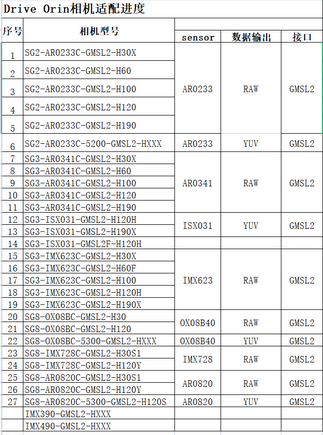
2MP
AR0233 H100 RAW 数量:4
8MP
AR0820 H120Y RAW 数量:2
AR0820 H30 RAW 数量:1
参考
https://zhuanlan.zhihu.com/p/497871767?utm_id=0
http://www.360doc.com/content/23/1122/19/40892371_1104930953.shtml


















 251
251

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











