







 本文介绍了ROS Indigo中的ROS话题概念,并通过实例演示了如何使用rostopic命令来管理话题,包括list、echo、type、pub等。同时,展示了如何利用rqt工具进行话题可视化,帮助理解ROS节点间通过话题进行通信的过程。
本文介绍了ROS Indigo中的ROS话题概念,并通过实例演示了如何使用rostopic命令来管理话题,包括list、echo、type、pub等。同时,展示了如何利用rqt工具进行话题可视化,帮助理解ROS节点间通过话题进行通信的过程。
ROS Indigo beginner_Tutorials-07 ROS话题
我使用的虚拟机软件:VMware Workstation 11
使用的Ubuntu系统:Ubuntu 14.04.4 LTS
ROS 版本:ROS Indigo
1. 理解 ROS 话题:
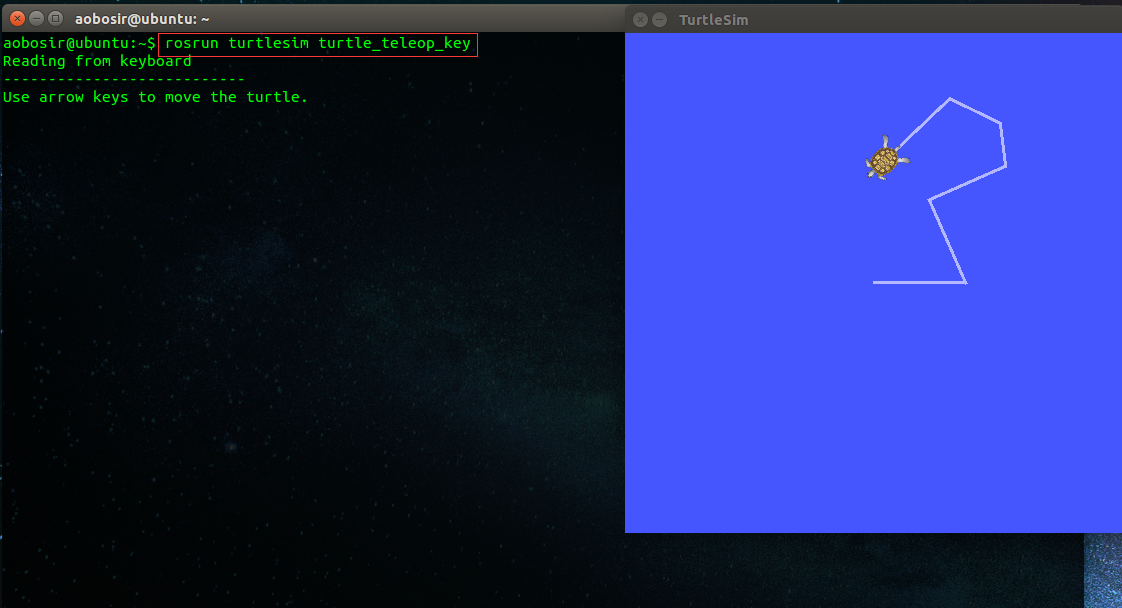
我们来通过运行一个 ROS 的例子程序来 感受一下什么是 ROS 话题:
运行下面的命令:
(Ctrl+Alt+T 打开一个新终端)
$ roscore(Ctrl+Alt+T 打开一个新终端)
$ rosrun turtlesim turtlesim_node(Ctrl+Alt+T 打开一个新终端)
$ rosrun turtlesim turtle_teleop_key我现在可以控制小海龟:(要在 turtle_teleop_key 所在的终端窗口,按键盘的 方向键 来控制小海龟运动。)
我们使用 rosnode list 命令来看看这个例子里,都运行了哪些节点:
输出:
/rosout
/teleop_turtle
/turtlesim解释:
/teleop_turle 节点向 ROS 网络总线上发布话题;
/turtlesim 节点接收了 /teleop_turle 发布的这个话题。 那么这个话题具体是什么,我们怎样可以知道呢?
上面打开的终端窗口不要关闭,我们继续进行下面的教程。
2. 使用图形化工具可视化话题的发布接收:
我们可以使用 ROS 网络图形化工具来 直观 的感受这个话题的发布接收:
如果没有安装 rqt ,先安装。执行下面的命令进行安装:
$ sudo apt-get install ros-indigo-rqt
$ sudo apt-get install ros-indigo-rqt-common-plugins现在重新打开一个终端, 运行下面的命令:
$ rosrun rqt_graph rqt_graph
# 或者,你也可以直接使用下面的命令。这两个命令是等价的。
$ rqt_graph都能得到下面的GUI界面:
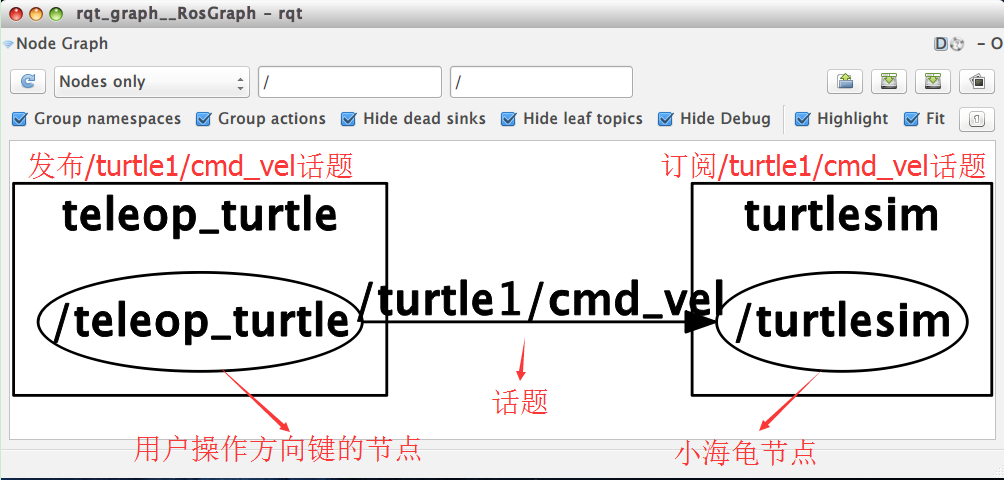
我们现在直观的看到了一个节点间通信的可视图。<
 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章
















 1081
1081

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









