







本人是刚学习ros的小白,参照《ROS机械臂开发:MoveIt! + Gazebo仿真》:https://www.jianshu.com/p/2db9c75e150c
根上文对自己的模型进行配置,在启动相应的**_bringup_moveit.launch文件后,并出现以下报错提示:
ERROR] [1603611730.550416457, 3411.444000000]: Unable to identify any set of controllers that can actuate the specified joints: [ joint1 joint2 joint3 joint4 joint5 joint6 ]
[ERROR] [1603611730.550483027, 3411.444000000]: Known controllers and their joints:尝试过:https://blog.csdn.net/Steve_Kung/article/details/89515873 未果,后来发现这种设置只是表面的形式,最根本的原因是设置在**_moveit_config文件夹中配置文件的设置与gazebo配置文件中控制器相关的配置不一至造成的,需要在以下位置设置一致。
首先:确保控制器已经下载:
sudo apt install ros-melodic-ros-controllers
(1)src/probot_gazebo/config/probot_anno_trajectory_control.yaml

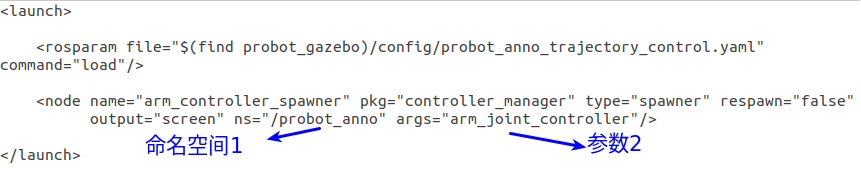
(2)src/probot_gazebo/launch/probot_anno/probot_anno_trajectory_controller.launch
(3)src/probot_anno_moveit_config/config/controllers_gazebo.yaml

(4)src/probot_anno_moveit_config/launch/probot_anno_moveit_controller_manager.launch.xml

注意:probot_anno_moveit_controller_manager.launch.xml 与 controllers_gazebo.yaml 的组合网上有多种形式,但和名字无关,controller_list内容合理即可















 1284
1284











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









