









引言:
运动学是对机械系统如何运行的最基本的研究。移动机器人运动学涉及到机器人运动的数学描述,包括其位置、速度和加速度的分析。这些描述通常涉及复杂的数学方程和模型,旨在理解和预测机器人在三维空间中的行为。
在移动机器人学中,我们必须了解机器人的机械行为以正确地设计特定任务的移动机器人,并针对一个移动机器人的硬件实例,学会如何创建控制软件。
当然,移动机器人并非是第一个要求这种分析的复杂的机械系统。30多年来,机器人的机械手一直是集中研究的主题。在某些方面,机器人机械手比早期的移动机器人要复杂得多:一个标准的焊接机械手也许有5个甚至更多的关节,而早期的移动机器人只不过是差动驱动的机器。近些年来,机器人学界对机器人机械手的运动学甚至是动力学(即关于力和质量)已经了解得相当全面了[1,13]
如同机器人机械手的学界一样,移动机器人学界提出许多相同的运动学难题。机械手的工作空间是至关重要的,因为它定义了相对于它环境的固定装置,以及它的终端执行器可以达到的可能位置的范围。移动机器人的工作空间同样是重要的,因为它定义了在移动机器人的环境中,它能实现的可能姿态的范围。机器人手臂的能控性定义了一种方式,按该方式,可以利用电机的主动接合,在工作空间中一个姿态接一个姿态地运动。相似地,移动机器人的能控性定义了在它的工作空间中可能的路径和轨迹。由于要考虑质量和力,机器人的动力学在工作空间和轨迹上加上了附加约束。移动机器人也受动力学限制,例如,拟汽车的机器人有翻滚危险高的重心,它限制了高速时的实际转弯半径。但是移动机器人和机械手臂的重要差别,也引人了一个位置估计的重大挑战。
机械手有一个固定于环境的终端,测量手臂的位置只不过是为了了解机器人的运动学和测量所有中间关节的位置而已。因此,机械手的位置,通过查看当前传感器数据,常常是能计算的。但是移动机器人是一个独立自动化系统。它能相对于它的环境整体地移动,没有一个直接的方法可以瞬时地测量移动机器人的位置,而是必须随时将机器人的运动集成。
此外,由于滑动,运动估计不准确,精确地测量移动机器人的位置显然是一个极具挑战性的任务了解机器人的运动过程,描述各轮对运动所作的贡献是过程的开始。在整个机器人的运动中,各轮都有作用。相似地,各轮也在机器人的运动中加上约束,例如拒绝横向刹车。
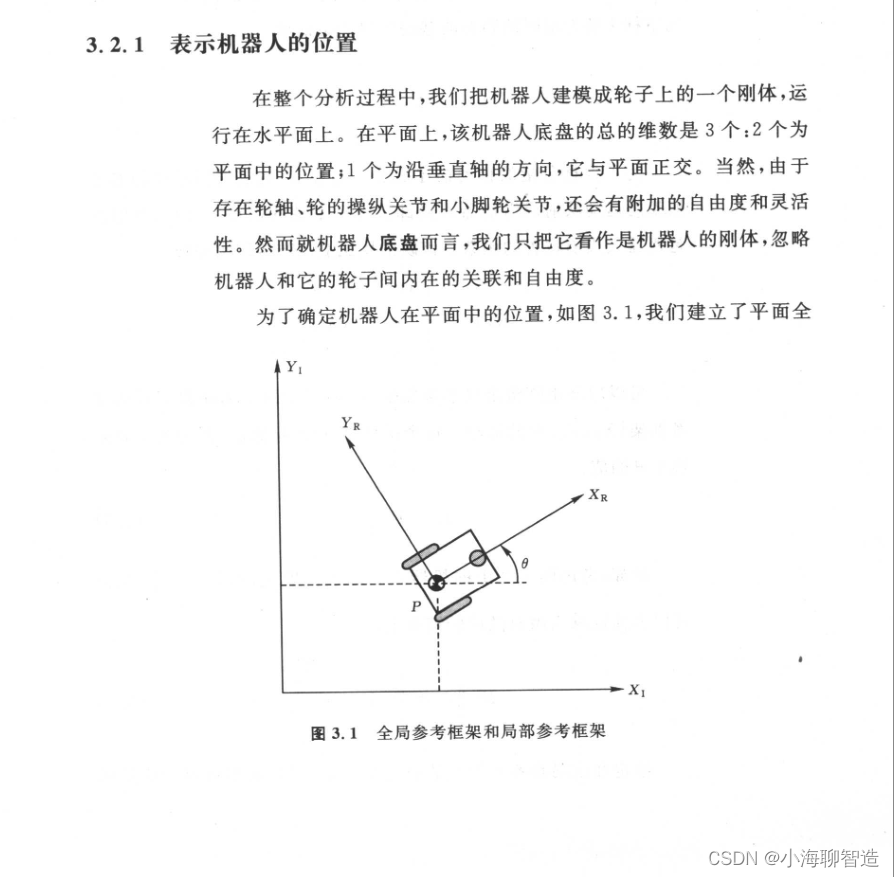
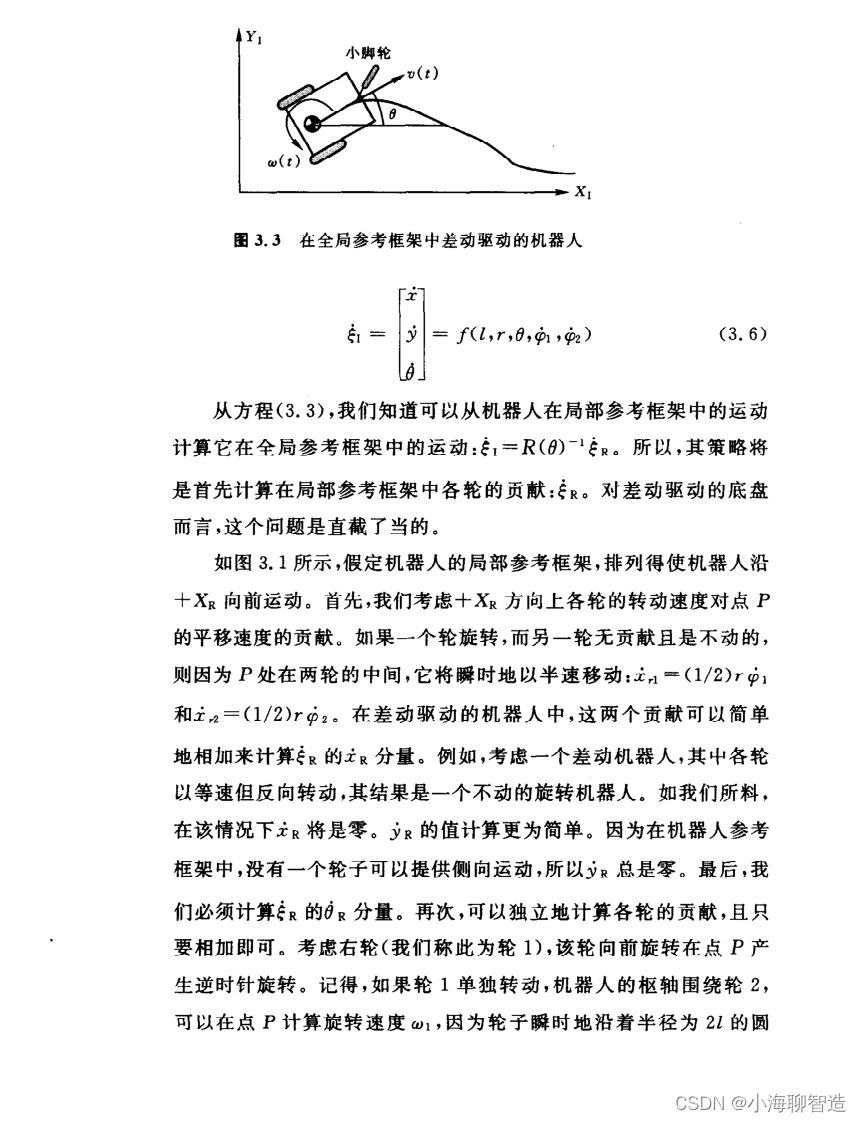
在以下章节中,我们将介绍可用全局参考框架和机器人局部参考框架表达机器人运动的概念。然后用该概念,我们展示简单的前向运动的运动学模型,描述机器人作为一个整体,它的几何特征和单个轮子行为的函数是怎样的。接下来,我们从形式上描述单个轮子的运动学约束,然后把这些约束联合起来表述整个机器人的运动学约束。用这些工具,人们可以计算机器人的路径和轨迹,它们定义了机器人的机动性。
运动学模型和约束
为整个机器人运动推导一个模型,是一个由底向上的过程。各单个轮子对机器人的运动作贡献,同时又对机器人运动施加约束。根据机器人底盘的几何特性,多个轮子是连在一起的。所以它们的约束联合起来,形成对机器人底盘整个运动的约束。但是,我们必须用相对清晰和一致的参考框架来表达各轮的力和约束。
在移动机器人学中,由于它独立和移动的本质,它需要在全局和局部参考框架之间有一个清楚的映射,这一点特别重要。我们从形式上定义这些参考框架开始,然后用最后得到的方程来注释单独轮子和整个机器人的运动学。

轮子运动学约束
机器人运动学模型的第一步是表达加在单独轮子上的约束。正如在3.2.2节中所示那样,单独轮子的运动以后可以被联合起来计算整个机器人的运动。如在第2章所讨论那样,有四种基本的轮子类型,它们各具变化广泛的运动学参数。所以,我们一开始就要提出对各轮子类型特定的约束集合。
不过,有几个重要的假设会简化上述的陈述。我们假定轮子的平面总是保持垂直,且在所有的情况下,在轮子与地面之间只有一个单独的接触点。此外,我们假定在该单独的接触点无滑动。也就是说,轮子只在纯滚动和通过接触点绕垂直轴转动的条件下进行运动。对运动学更深人的处理,包括滑动接触,请参阅参考文献[25]。
在这些条件下,对每一个轮子类型,
我们提出两个约束。
- 第一个约束坚持滚动接触的概念,即当运动在适当方向发生时,轮子必须滚动。
- 第二个约束坚持无横向滑动的概念,即在正交于轮子的平面,轮子必须无滑动。
















 715
715











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











