










GymFetch-插孔开抽屉任务介绍
前言:
最近做HER相关对比实验,需要几个验证仿真环境,所以仿照原版gym-fetch的封装格式,借用了metaworld的素材,为了和push,pick有所区别,所以重新搭建了两个环境,一个是随机插孔任务,一个是开抽屉任务。前者目前看来是符合需要的。后者面临着穿模的问题,后面会有所讨论。
开源链接:https://github.com/kaixindelele/GymFetch
插孔任务介绍:
总所周知,mujoco是不能仿真凹形体的,所以如果导入一个3D建模好的插孔盒子,是无法正常模拟的,插入孔中都会出现碰撞的问题。
而插孔任务其实很多论文中都提到了,比如朱玉可的19年那篇best paper, 比如GUAPO算法:
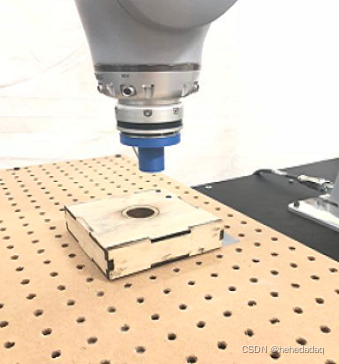
但好用的,开源的插孔仿真环境,我还真的没怎么找到过,就连robosuite里面都没搭建一个好的插孔任务,我是没想到的,待会儿发个邮件问问他们。目前能找到的都是四个长方形拼成的一个带孔盒子:
现在有另一个问题,这里的四个box都是没有自由度的,mujoco的box 几何体如果加了joint自由度的话,那么被夹爪接触了之后,会发生偏移,哪怕是将关节阻尼damping='10000000000'都会从缝隙中插进去。
所以这四个box必须得是无自由度的。
这样的话,带孔盒子和孔就是固定的,不利于任务难度的提高。
我必须要随机初始化孔的中心位置,然后根据孔的中心位置,安排box的位置,这样的话,就需要一个坐标生成函数,一个每次reset时,设置box位置的函数。
box坐标生成函数:输入孔的中心坐标xy,和孔的大小,整个盒子的长度一半。
输出四个box的坐标和大小。
def reset_hole(self, hole_center, half_hole_size=0.02, hsw1y=0.1):
cx, cy = hole_center
hsw1x = (hsw1y - half_hole_size) / 2.0
w1x = cx - hsw1x - half_hole_size
w1y = cy
hsw2x = (2*hsw1y-2*hsw1x)/2.0
hsw2y = (hsw1y-half_hole_size)/2.0
w2x = w1x + hsw1x + (2*hsw1y-2*hsw1x)/2.0
w2y = w1y - hsw1y + (hsw1y-half_hole_size)/2.0
hsw3x = hsw2x
hsw3y = hsw2y
w3x = w2x
w3y = w1y + hsw1y - (hsw1y-half_hole_size)/2.0
hsw4x = (hsw1y-half_hole_size)/2
hsw4y = half_hole_size
w4x = cx + half_hole_size + (hsw1y - half_hole_size) / 2.0
w4y = cy
return (w1x, w1y), (w2x, w2y), (w3x, w3y), (w4x, w4y)
设定body的pos,mujoco中除了set_joint_pos函数外,还能直接给body_pos设定值:
self.sim.model.body_pos[self.sim.model.body_name2id('w4')] = np.array(
[w4x, w4y, self.sim.model.body_pos[self.sim.model.body_name2id('w4')][2]])
这样就可以随机初始化孔的位置了。
插孔任务observation的设置:
关于环境观察值的输出格式,分为
‘observation’: obs.copy(), 除了desired_goal之外的都在里面
‘grip_goal’: grip_pos.copy(), 夹爪的末端坐标xyz
‘achieved_goal’: achieved_goal.copy(), desired_goal if grip2desire > 2cm else grip_goal,即离得远时,是目标点的坐标(加上移偏置),离的近了,直接变为夹爪坐标。即假设有一个虚拟物块在目标上方,到了之后,贴着夹爪随着夹爪移动。
‘desired_goal’: self.goal.copy(),
上面基本上说清楚了观察值。
关于奖励函数的设置,仍然是稀疏奖励,但是将距离阈值变成了1cm(如果难度过高,回头再调)。
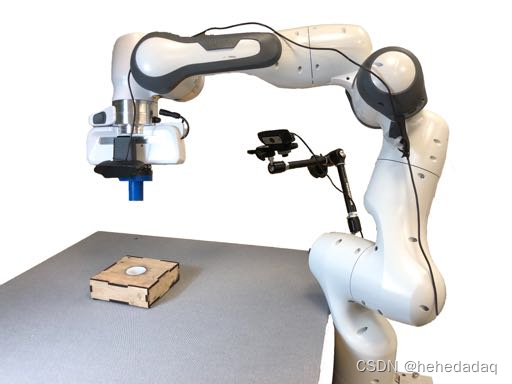
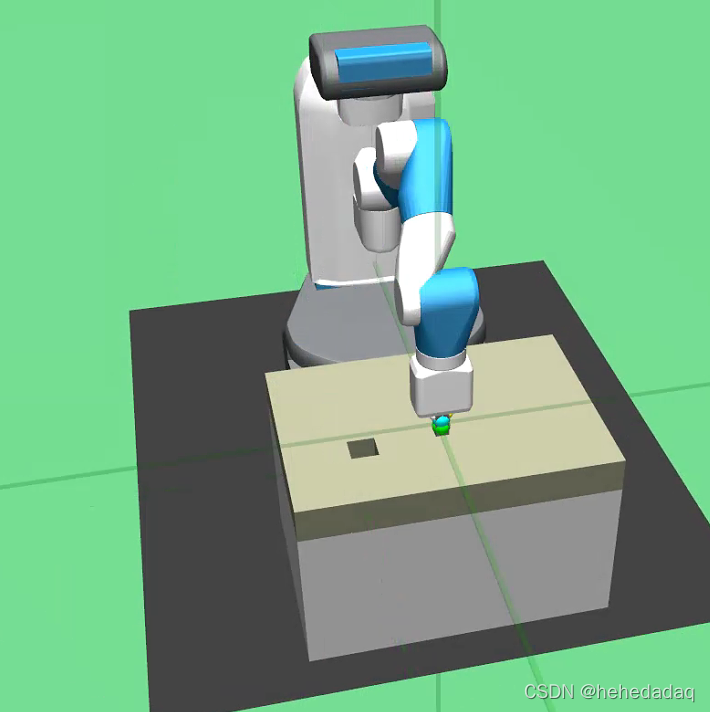
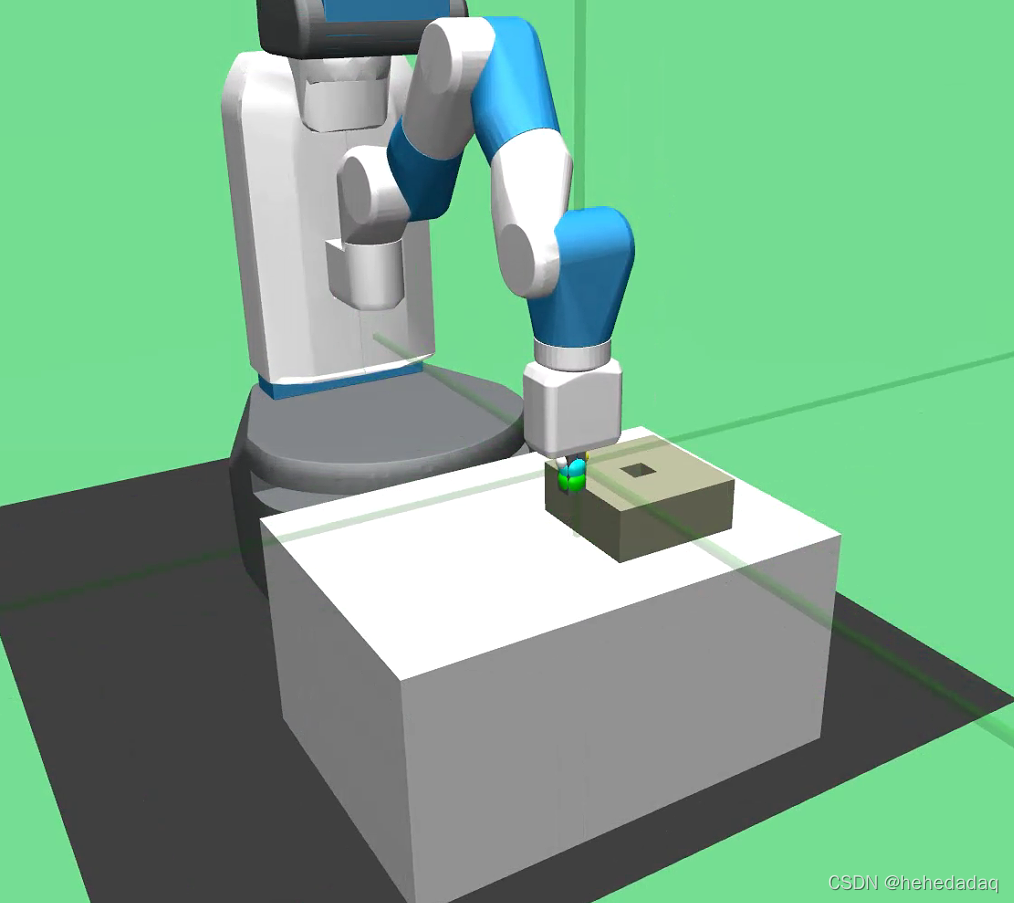
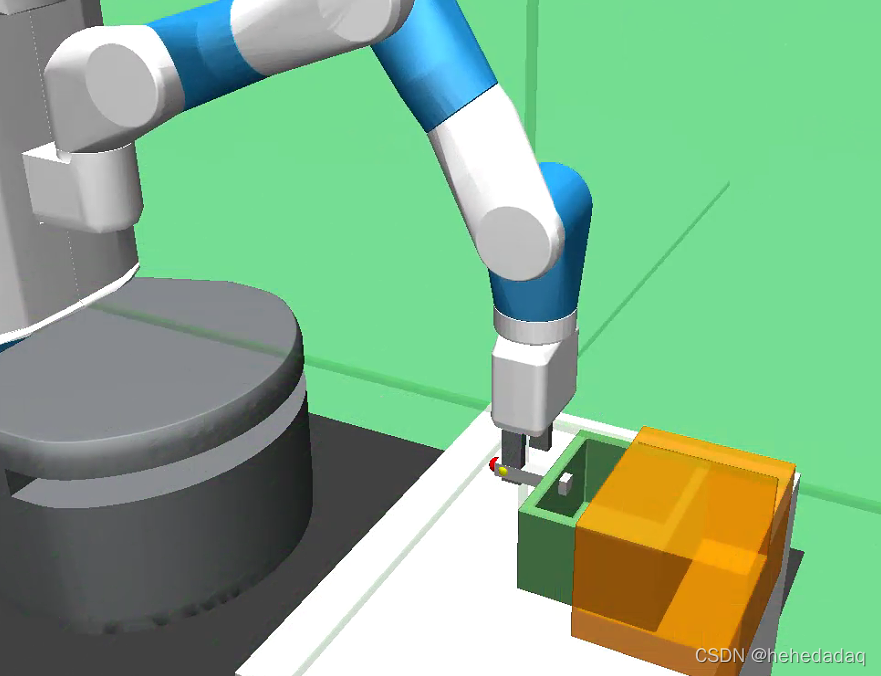
最终效果:
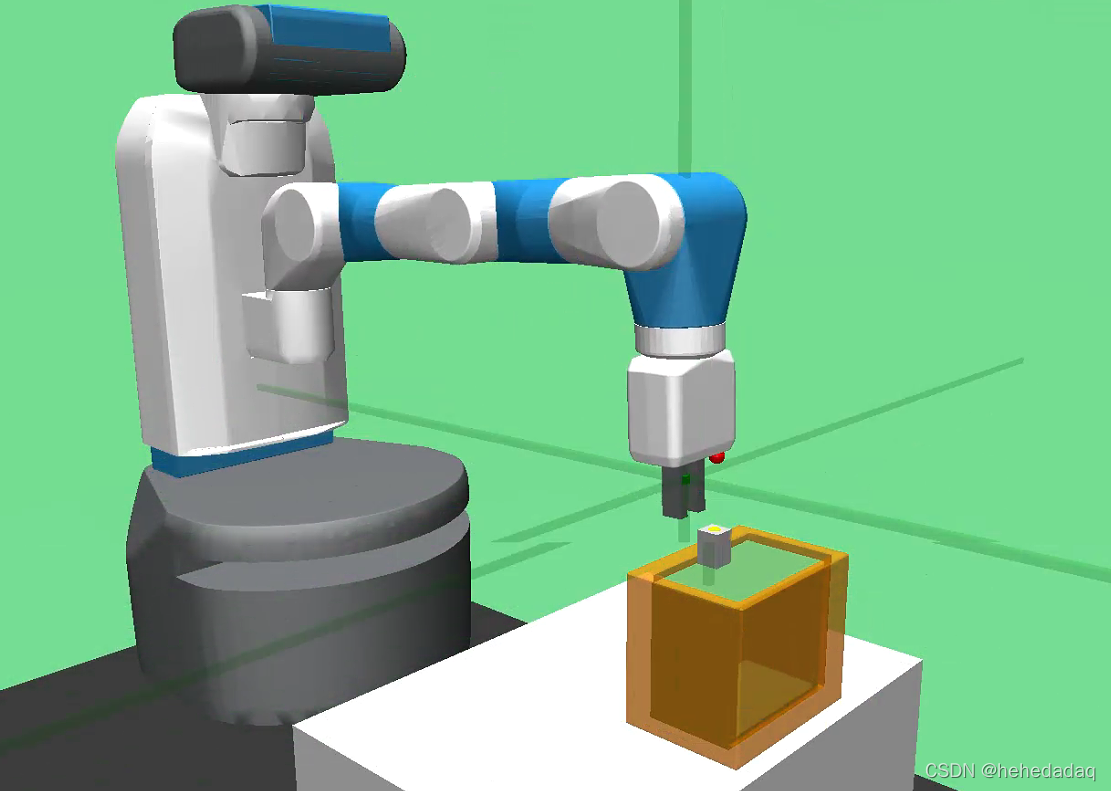
抽屉任务:
横版:
竖版:
我想的是将整个抽屉设置成刚体,夹爪穿不过去的那种,但是现在出现各种奇怪的问题,如果将里面的抽屉joint damp设置的低,那么就会自己抖动,如果设置damp大了,那么夹爪会想着直接穿过外壳,直接拉着里面的抽屉往外动。
关节limited属性也不起作用,有点迷惑。回头再调调。
联系方式:
ps: 欢迎做强化的同学加群一起学习:
深度强化学习-DRL:799378128
Mujoco建模:818977608
欢迎玩其他物理引擎的同学一起玩耍~
欢迎关注知乎帐号:未入门的炼丹学徒
CSDN帐号:https://blog.csdn.net/hehedadaq
我的个人博客:
网址非常好记:metair.top
极简spinup+HER+PER代码实现:https://github.com/kaixindelele/DRLib
















 1046
1046











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











