






在上篇博客中,完成了mid360的接线、fast-lio配置,并可以用fast-lio时时跑出来点云地图。那么如何采集mid360数据呢?
一、其实还是比较简单,
(1)启动Mid360
启动sdk2的程序,注意不要用rviz_mid360.launch,因为这个所获得话题是通用话题,不是customMsg画话题,fast-lio是不能用的。如果启动的是roslaunch livox_ros_driver2 rviz_MID360.launch 则录制的是sensors_msg/pointcloud2类型的数据。
roslaunch livox_ros_driver2 msg_MID360.launch(2)录制所有话题
rosbag record -a 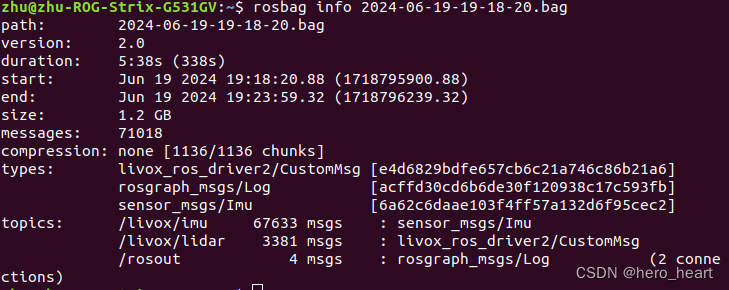
可以看到/livox/lidar 已经是livox_ros_driver2/CustomMsg类型了。
这里附加一点,关于rosbag record的学习
rosbag record -a
-a 表示把当前发布的所有 topic 数据都录制保存到一个 rosbag 文件中,录制的数据包名字为日期加时间,并保存到主目录中。
rosbag record /topic_name1 /topic_name2 /topic_name3
录制/topic_name1 /topic_name2 /topic_name3话题
rosbag record -O filename.bag /topic_name1
-O (大写)参数指定生成数据包的名字,保存在主目录下。
rosbag record -o partFileName /topic_name1
-o (小写)参数指定生成数据包的前缀名,联合形式
<node pkg="rosbag" type="record" name="bag_record" args="/topic1 /topic2"/>
在 launch 文件中使用 rosbag record 命令
二、在获得mid360数据之后,播放数据包,并使用fast-lio进行重建,得到重建的地图。通过如下两步就可以重建地图了。
(1)启动fast-lio
1.先cd到目录下,并source
2.roslaunch fast_lio mapping_mid360.launch
(2)播放bag包
rosbag play xx.bag
延伸知识:
rosbag play xx.bag
播放名称为xx.bag的bag包
rosbag play -r 2 filename.bag
-r 后面的数字2对应播放速率
rosbag play -l filename.bag
-l 表示循环播放
rosbag play filename.bag --topic /topic1
只播放topic1
rosbag play --pause localization_test_scene_1.bag
空格控制暂停与播放
rosbag play -s 10 filename.bag
-s 表示从第几秒开始
rosbag play -u 100 filename.bag
-u 表示仅use包的前几秒信息
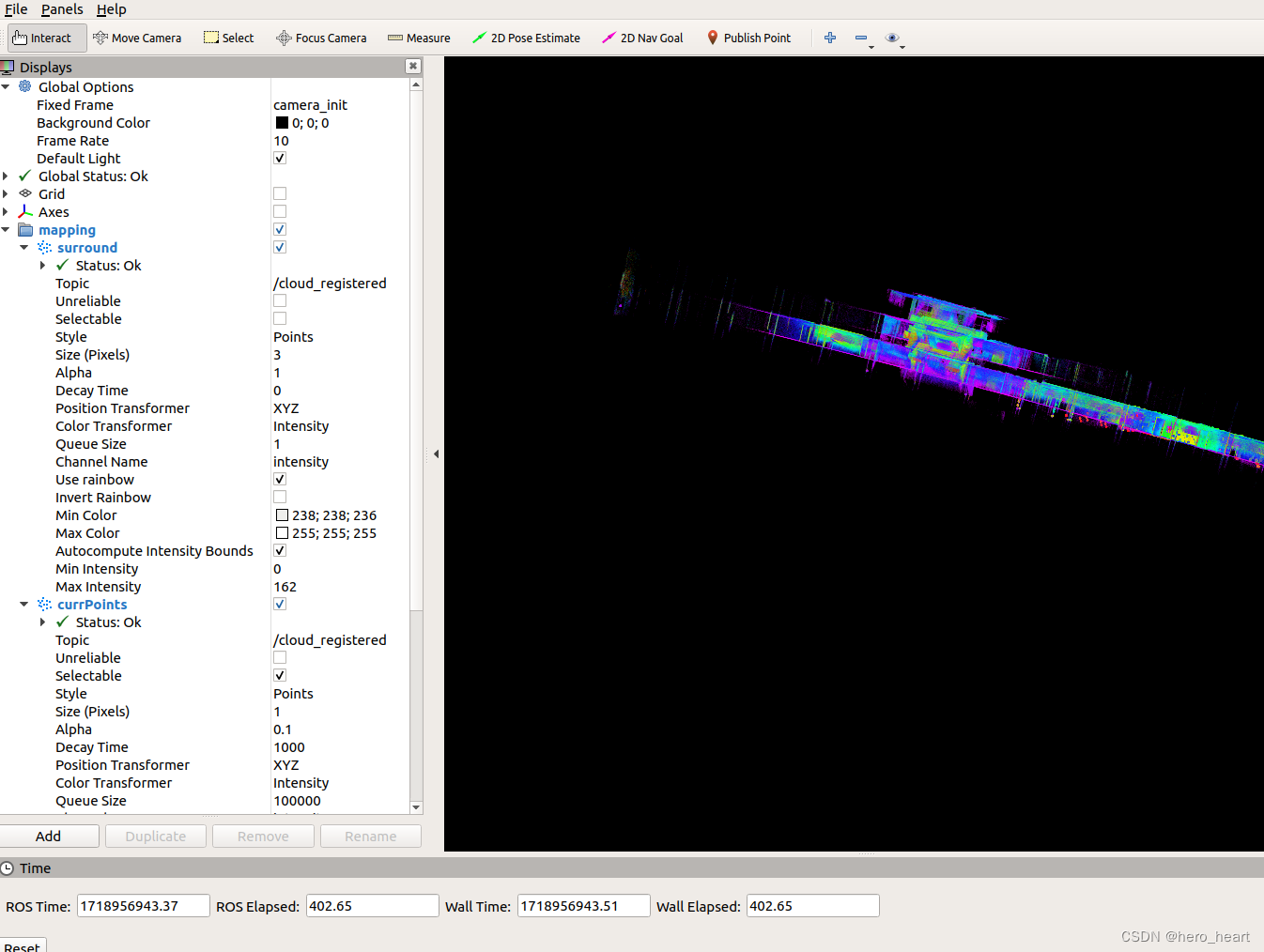
重建结果为:
三、bag包的基础操作
(1)查看bag包的信息,可以查看到消息的类型
rosbag info filename.bag
显示出来bag包的信息(2)录制bag包出现异常情况的处理方法
假如在录制bag中出现了异常等情况,错误如下:
运行.bag文件
rosbag play xx_s.bag
出现
[ INFO] [1632745075.167633711]: Connected to master at [localhost:11311]
[ INFO] [1632745075.169908499]: Opening rotate_platform_s.bag
[FATAL] [1632745075.198540194]: Error reading from file: wanted 3173600016 bytes, read 597086 bytes
修复
rosbag reindex rotate_platform_s.bag
如果在录制bag中出现了异常等情况,生成的是.bag.active文件,则执行下面指令进行修复:
rosbag reindex rotate_platform_s.bag.active
rosbag fix rotate_platform_s.bag.active new.bag
(3)launch文件中playbag
launch文件中添加
<arg name="bag_name" value="/home/test01/mybag.bag"/>
<node pkg="rosbag" type="play" name="rosbag" args="-r 1.0 -s 0.0 $(arg bag_name)"/>
(4)在播包的过程中,启动终端,输入rostopic list,可以查看消息
rostopic list
参考:















 1768
1768











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









