









笔记为B站教学视频(https://www.bilibili.com/video/BV1q44y1x7WC?p=5)的记录,非常感谢UP主的精彩分享!
一、工作空间可视化
整体思路:
- 在关节空间中随机生成变量;
- 通过正运动学函数fkine得到变换矩阵;
- 变换矩阵通过transl函数得到三维坐标。
在点足够多的情况下,不断标出的三维坐标拼接后则形成了动作空间。
生成随机变量:
rand
//在(0,1)内均匀生成随机数字
若想在[m,n]内随机生成一个数字:
num = m+rand*(m-n)
生成随机的关节空间变量:
q=qmin + rand*(qmax-qmin);
// qmin,qmax为该关节的角度上下限
在程序中定义关节限制:
使用Link的属性Link.qlim
定义关节限制:
L(1) = Link('revolute','d',0.216,'a',0,'alpha',pi/2);
L(1).qlim=[-150,150]/180*pi;
//等价于:
L(1)=Link('revolute','d',0.216,'a',0,'alpha',pi/2,'qlim',[-150,150]/180*pi)
查看某关节的限制可以用:
L(1).qlim //L(1)已经被定义为一个Link
二、轨迹规划
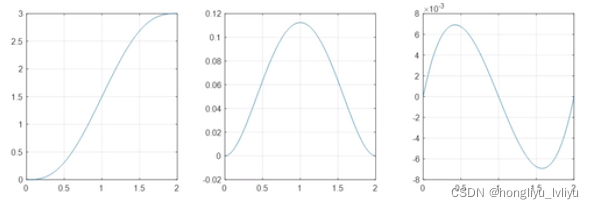
2.1 五次多项式
在考虑轨迹的时间、位置、速度、加速度的约束条件时,通过五次多项式,可以是路径平滑,且起点终点不突变。
y
5
=
A
x
5
+
B
x
4
+
C
x
3
+
D
x
2
+
E
x
+
F
y_5 = Ax^{5}+Bx^{4}+Cx^{3}+Dx^{2}+Ex+F
y5=Ax5+Bx4+Cx3+Dx2+Ex+F
- 在工具箱内有五次多项式轨迹相关函数:
tpoly
例如:
t = linspace(0,2,51); %等价于==0:0.04:2 %0-2s,进行51次插值
[P,dP,ddP]=tpoly(0,3,t);
% 指定初末速度
[P,dP,ddP]=tpoly(0,3,51,0.02,0.01);
% 0-3s内进行51次插值

2.2 其它常用函数
- 混合曲线轨迹:
lspb
例如:
t=linspace(0,2,51);
[P,dP,ddP]=lspb(0,3,t);
%指定最大速度
[P,dP,ddP]=lspb(0,3,51,0,1);

- 多维轨迹:
mtraj
t=linspace(0,2,51);
[P,dP,ddP]=mtraj(@tpoly,[0,0],[3,4],t); %用@衔接插值方式
% 初始位置:[0,0] 末位:[3,4]

- 多维多段轨迹:
mstraj
例如从[0,0] 2s到[3,4],再京过2s到[1,2]
TRAJ=mstraj(WP,QDMAX,TSEG,Q0,DT,TACC,OPTIONS)
% WP: 经过路径点 QDMAX:最大速度 TSEG:每段的时间间隔
%(最大速度和时间间隔只能固定一个;如果确定了一个,另一个需要置为空)
% Q0:初始位置(第一个wp) DT:插值间隔 TACC:加速时间
例如:
wp=[0,0;3,4;1,2];
P1=mstraj(wp,[],[2,1],[],0.04,0);
P2=mstraj(wp,[],[2,1],[],0.04,0.5);

2.3 位置轨迹规划
整体思路:

demo:
P1=[0.7,-0.5,0];
P2=[0.7,0.5,0.5];
t=linspace(0,2,51);
Traj = mtraj(@tpoly,P1,P2,t);
n = size(Traj,1);
T = zeros(4,4,n);
for i=1:n
T(:,:,i) = transl(Traj(i,:))*trotx(180);
end
Qtraj = Five_dof.ikunc(T);
Five_dof.plot(Qtraj); %只运动,不显示轨迹
% Five_dof.plot(Qtraj,'trail','b'); %录制轨迹
% Five_dof.plot(Qtraj,'trail','b','movie','trail.gif'); %保存录像
- 位姿插值函数
trinterp(线性插值)
trinterp(T0,T1,M) %T0:初始状态的变换矩阵 T1:末端的变换矩阵 M:插值次数(正整数)
例如:
T=trinterp(T1,T2,51); %得到的t-position结果是直线,因为使用的是线性插值
T=trinterp((T1,T2,tpoly(0,2,50)/2); %归一化,可以得到光滑曲线
- 笛卡尔轨迹
ctraj(默认梯形速度)
ctraj(T0,T1,N) %T0:初始状态的变换矩阵 T1:末端的变换矩阵 N:插值次数(正整数)
例如:
T=ctraj(T1,T2,51);
T=ctraj((T1,T2,tpoly(0,2,50)/2);
2.4 姿态轨迹规划

旋转矩阵 转 RPY角(横滚、俯仰、偏航);
生成多维轨迹(mtraj);
RPY角转变换矩阵T;
%% 位姿轨迹规划 matlab (有突变)
figure(4)
% rpy1 = tr2rpy(T1)/pi*180; %旋转矩阵转转角,并转换为角度制
% rpy2 = tr2rpy(T2)/pi*180;
rpy1 = [0,150,0];
rpy2 = [200,0,0];
rpy_traj = mtraj(@tpoly,rpy1,rpy2,t); %5次多项式插值
T_traj_rot=rpy2tr(rpy_traj); %反得到变换矩阵(仅有旋转部分)
P1 = transl(T1);
P2 = transl(T2);
P_traj = mtraj(@tpoly,P1',P2',t);
T_traj_transl = transl(P_traj); %有位移部分的变换矩阵
n = length(t);
T_traj = zeros(4,4,n);
for i=1:n
T_traj(:,:,i) = T_traj_transl(:,:,i)*T_traj_rot(:,:,i); %将带位移的变换矩阵与带旋转的相乘
end
q_traj = Five_dof.ikunc(T_traj);
Five_dof.plot(q_traj,'trail','r');
2.5 用关节变量做轨迹规划
在初末位置的变换矩阵求逆,得到关节变量;
再使用关节变量进行轨迹规划
- 关节变量轨迹规划函数:
[q,qd,qdd]=jtraj(q0,qf,M)
[q,qd,qdd]=jtraj(q0,qf,M)
%q0,qf :初末关节变量 M :插值次数
[q,qd,qdd]=jtraj(q0,qf,T,qd0,qdf)
%T: 时间 例如:T = linspace(0,2,51)
% qd0,qdf: 初末关节速度要求
优势:在关节空间中顺滑,运行起来相对平稳
3. 显示三维模型
可以导入STL模型
函数:serialLink/plot3d
其中,path是导入STL模型(可以是ascii或者二进制)
!:每个STL文件的命名方式是LinkN.stl,N=0,1,…,N
只能用于DH的标准型建模(坐标系连接杆的末端)

例如:

clear;
clc;
L(1) = Link('revolute','d',0.216,'a',0,'alpha',pi/2);
L(2) = Link('revolute','d',0,'a',0.5,'alpha',0,'offset',pi/2);
L(3) = Link('revolute','d',0,'a',sqrt(0.145^2+0.42726^2),'alpha',0,'offset',-atan(427.46/145));
L(4) = Link('revolute','d',0,'a',0,'alpha',pi/2,'offset',atan(427.46/145));
L(5) = Link('revolute','d',0.258,'a',0,'alpha',0);
Five_dof = SerialLink(L,'name','5-dof');
Five_dof.base = transl(0,0,0.28);
q0 = [0 0 0 0 0];
v = [35 20];
w = [-1 1 -1 1 0 2];
Five_dof.plot3d(q0.'tilesize',0.1,'workspace',w,'path','D:\XX\XX','nowrist','view',v)
light('Position',[1 1 1],'color','w'); %加光源,使效果更清晰















 393
393

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









