






文章目录
SLAM
SLAM(Simultaneous Localization and Mapping,同步定位与建图)是机器人和无人驾驶领域的核心技术之一。它通过传感器数据(如激光雷达、摄像头等)实时估计机器人或无人系统的位姿(位置和姿态),并构建环境地图。
hector_mapping
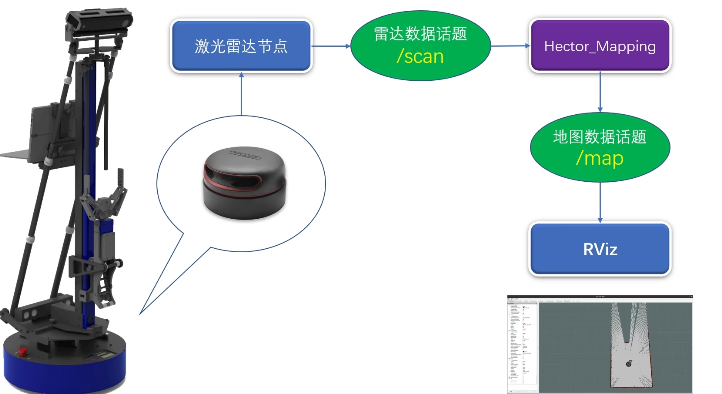
hector_mapping 是一个用于基于激光雷达(LIDAR)的 SLAM(Simultaneous Localization and Mapping,同时定位与建图)的节点,适用于没有里程计(odometry)且计算资源有限的场景。
- 订阅主题
scan (sensor_msgs/LaserScan)
用于 SLAM 系统的激光雷达扫描数据。
syscommand (std_msgs/String)
系统命令。如果字符串等于 “reset”,则地图和机器人姿态将重置为初始状态。 - 发布主题
map_metadata (nav_msgs/MapMetaData)
从该主题可以获取地图数据,数据是持久化的,并定期更新。
map (nav_msgs/OccupancyGrid)
从该主题可以获取地图数据,数据是持久化的,并定期更新。
slam_out_pose (geometry_msgs/PoseStamped)
估计的机器人姿态,不包含协方差。
poseupdate (geometry_msgs/PoseWithCovarianceStamped)
估计的机器人姿态,包含高斯估计的不确定性。
sudo apt install ros-noetic-hector-mapping
rosrun hector_mapping hector_mapping
rosrun rviz rviz
然后add robotmodule+map+laserscan,再分别订阅话题
最后控制机器人移动来SLAM建图
rosrun rqt_robot_steering rqt_robot_steering
launch启动hector
catkin_create_pkg slam_pkg roscpp rospy std_msgs
新建一个launch文件夹,里面存放launch文件
$(find wpr_simulation)相当于执行rospack find wpr_simulation 指令的结果
<launch>
<include file="$(find wpr_simulation)/launch/wpb_stage_slam.launch" />
<node pkg="hector_mapping" type="hector_mapping" name="hector_mapping" >
</node>
<node pkg="rviz" type="rviz" name="rviz" args="-d $(find slam_pkg)/rviz/slam.rviz" />
<node pkg="rqt_robot_steering" type="rqt_robot_steering" name="rqt_robot_steering" />
</launch>
Hector_Mapping参数设置
-
~map_update_distance_thresh
类型:double(浮点数)
默认值:0.4
单位:米(m)
作用:
这是地图更新的距离阈值。机器人需要移动至少 0.4 米(默认值)的距离,才会触发一次地图更新。
详细说明:
如果机器人移动的距离小于这个阈值,地图不会更新。
这个参数与 ~map_update_angle_thresh 配合使用,满足其中一个条件即可触发地图更新。 -
~map_update_angle_thresh
类型:double(浮点数)
默认值:0.9
单位:弧度(rad)
作用:
这是地图更新的角度阈值。机器人需要旋转至少 0.9 弧度(默认值),才会触发一次地图更新。
详细说明:
如果机器人旋转的角度小于这个阈值,地图不会更新。
这个参数与 ~map_update_distance_thresh 配合使用,满足其中一个条件即可触发地图更新。 -
~map_pub_period
类型:double(浮点数)
默认值:2.0
单位:秒(s)
作用:
这是地图发布的时间间隔。每隔 2.0 秒(默认值),地图数据会被发布一次。
详细说明:
即使机器人没有移动或旋转,地图也会按照这个时间间隔定期发布。
这个参数与 ~map_update_distance_thresh 和 ~map_update_angle_thresh 无关,它只是控制地图发布的频率。
<launch>
<include file="$(find wpr_simulation)/launch/wpb_stage_slam.launch" />
<node pkg="hector_mapping" type="hector_mapping" name="hector_mapping" >
<param name="map_update_distance_thresh" value="0.1" />
<param name="map_update_angle_thresh" value="0.1" />
<param name="map_update_distance_thresh" value="0.1" />
</node>
<node pkg="rviz" type="rviz" name="rviz" args="-d $(find slam_pkg)/rviz/slam.rviz" />
<node pkg="rqt_robot_steering" type="rqt_robot_steering" name="rqt_robot_steering" />
</launch>
ROS的TF系统(定位)
ROS(Robot Operating System)中的 TF(Transform)系统 是一个用于管理坐标系变换的核心工具。它允许用户在机器人系统中定义和查询不同坐标系之间的关系,例如机器人底盘、传感器、机械臂等之间的相对位置和方向。TF 系统在机器人导航、感知和控制中起着至关重要的作用。
- TF 系统的基本概念
1.1 坐标系(Frame)
-
在机器人系统中,每个部件(如传感器、机械臂、底盘等)都有自己的坐标系。
-
坐标系通常用 父子关系 表示。例如,激光雷达的坐标系可能是机器人底盘坐标系的子坐标系。
1.2 变换(Transform)
-
变换 描述了从一个坐标系到另一个坐标系的转换关系,包括平移(位置)和旋转(方向)。
-
变换可以用 4x4 的变换矩阵 或 平移向量 + 四元数(Quaternion) 表示。
1.3 时间戳(Timestamp)
-
变换是随时间变化的(例如移动的机器人),因此每个变换都有一个时间戳,表示该变换的有效时间。
- TF 系统的核心功能
2.1 发布变换(Publish Transform)
- 通过
tf::TransformBroadcaster发布坐标系之间的变换关系。 - 例如,发布机器人底盘到激光雷达的变换。
2.2 查询变换(Lookup Transform)
- 通过
tf::TransformListener查询两个坐标系之间的变换关系。 - 例如,查询激光雷达坐标系到地图坐标系的变换。
2.3 管理变换树(Transform Tree)
- TF 系统维护一个 变换树,其中每个节点是一个坐标系,边是坐标系之间的变换关系。
- 变换树必须是一个有向无环图(DAG),即不能有循环依赖。
- TF 系统的使用
3.1 发布变换
以下是一个发布变换的示例代码:
#include <ros/ros.h>
#include <tf/transform_broadcaster.h>
int main(int argc, char** argv) {
ros::init(argc, argv, "tf_broadcaster");
ros::NodeHandle nh;
tf::TransformBroadcaster broadcaster;
ros::Rate rate(10); // 10 Hz
while (ros::ok()) {
// 定义变换:从 "base_link" 到 "laser"
tf::Transform transform;
transform.setOrigin(tf::Vector3(0.1, 0.0, 0.2)); // 平移 (x, y, z)
transform.setRotation(tf::Quaternion(0, 0, 0, 1)); // 旋转 (x, y, z, w)
// 发布变换
broadcaster.sendTransform(
tf::StampedTransform(transform, ros::Time::now(), "base_link", "laser"));
rate.sleep();
}
return 0;
}
模拟
- 发布从
base_link(机器人底盘)到laser(激光雷达)的变换。 - 变换包括平移
(0.1, 0.0, 0.2)和旋转(0, 0, 0, 1)(无旋转)。
3.2 查询变换
以下是一个查询变换的示例代码:
#include <ros/ros.h>
#include <tf/transform_listener.h>
int main(int argc, char** argv) {
ros::init(argc, argv, "tf_listener");
ros::NodeHandle nh;
tf::TransformListener listener;
ros::Rate rate(10); // 10 Hz
while (ros::ok()) {
tf::StampedTransform transform;
try {
// 查询从 "base_link" 到 "laser" 的变换
listener.lookupTransform("base_link", "laser", ros::Time(0), transform);
// 打印变换信息
ROS_INFO("Translation: [%f, %f, %f]",
transform.getOrigin().x(),
transform.getOrigin().y(),
transform.getOrigin().z());
ROS_INFO("Rotation: [%f, %f, %f, %f]",
transform.getRotation().x(),
transform.getRotation().y(),
transform.getRotation().z(),
transform.getRotation().w());
} catch (tf::TransformException &ex) {
ROS_ERROR("%s", ex.what());
}
rate.sleep();
}
return 0;
}
- 解释:
- 查询从
base_link到laser的变换。 - 打印变换的平移和旋转信息。
- 查询从
- TF 系统的常用工具
4.1tf_monitor
- 查看当前 TF 树的状态。
- 命令:
rosrun tf tf_monitor
4.2 view_frames
- 生成 TF 树的图形化表示(PDF 文件)。
- 命令:
rosrun tf view_frames
4.3 tf_echo
- 实时查看两个坐标系之间的变换。
- 命令:
rosrun tf tf_echo base_link laser
roslaunch wpr_simulation wpb_hector.launch
rostopic list
llk@LLK:~/AI_Study_Note/Embodied-AI/ROS/catkin_ws/src$ rostopic type /tf
tf2_msgs/TFMessage
https://docs.ros.org/en/api/tf2_msgs/html/msg/TFMessage.html
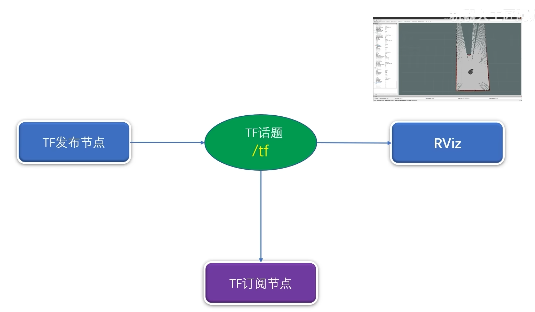
tf2_msgs/TFMessage 是一个消息类型,用于在 ROS(Robot Operating System)中传递多个坐标变换信息。
transforms:这是一个数组,包含多个 geometry_msgs/TransformStamped 消息。每个 TransformStamped 消息表示一个坐标系之间的变换关系。
用途:TFMessage 通常用于在 ROS 节点之间传递多个坐标变换数据。例如,一个节点可以发布一个 TFMessage 消息,包含多个坐标系之间的变换关系,其他节点可以订阅该消息以获取这些变换信息。
geometry_msgs/TransformStamped 是一个消息类型,用于表示一个带时间戳的坐标变换。
- header:这是一个 std_msgs/Header 消息,包含时间戳和坐标系信息。
header.stamp:时间戳,表示变换的时间。
header.frame_id:父坐标系的名称。 - child_frame_id:子坐标系的名称,表示该变换是从父坐标系到子坐标系的变换。
- transform:这是一个 geometry_msgs/Transform 消息,包含平移(translation)和旋转(rotation)信息。
transform.translation:平移向量,包含 x、y、z 三个分量。 就是子坐标系原点在父坐标系的位置
transform.rotation:旋转四元数,包含 x、y、z、w 四个分量。子坐标系的x,y,z轴的旋转变化或者表示该物体相对另一个坐标系的旋转角度和方向。
rostopic echo /tf
rosrurqt_tf_tree rqt_tf_tree
什么是里程计
电机里程计在激光雷达 SLAM(Simultaneous Localization and Mapping,同时定位与建图)中起着重要的作用。它通过记录电机的转动数据来计算机器人的位移信息,从而推算出机器人的当前位置。
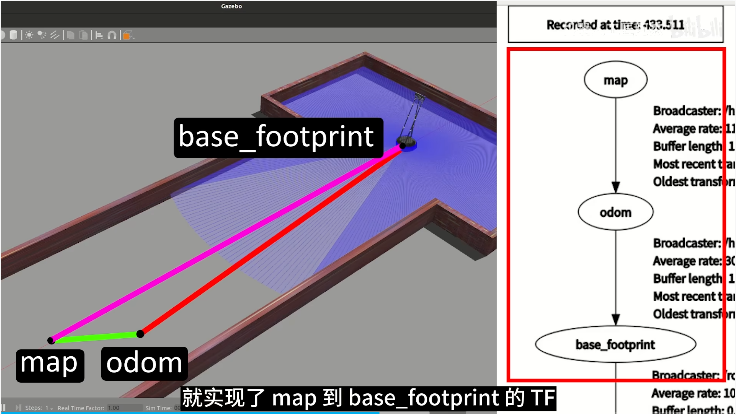
这种位移信息以 TF 消息包的形式发布到话题 /tf 中。电机里程计的输出是 odom 到 base_footprint 的 TF,而激光雷达 SLAM 输出的是 map 到 base_footprint 的 TF。
电机里程计的优势在于,它不依赖于外部参照物的特征,因此不会受到参照物特征的误导。
然而,电机里程计存在误差,例如机器人轮胎打滑时,里程计的定位信息可能会与实际位置不相符。此外,这种误差会不断累积,使得定位误差越来越大。因此,需要使用障碍物点云配准算法来修正里程计的误差
roslaunch wpr_simulation wpb_corridor_hector.launch
Hector Mapping 是一种基于激光雷达的 SLAM 算法,其核心思想是通过雷达点云和障碍物配准的方法来进行定位。在 Hector Mapping 中,机器人的位移主要由雷达点云配准算法计算得出,而不使用里程计的数据。为了在 RViz 中显示地图和机器人模型,Hector Mapping 会输出一段 map 到 odom 的 TF,以抵消不断增长的里程计 TF,从而让 base_footprint 的位置始终与 scanmatcher_frame 保持一致。
在运行 Hector Mapping 时,如果机器人进入两侧墙体平滑的走廊,激光雷达只能扫描到两侧的墙壁,导致障碍物点云配准的结果认为机器人没有往前移动,误以为是雷达数据的噪声导致定位在一个小范围内抖动。此时,Hector Mapping 会输出一段与机器人运动方向相反的 TF,以抵消里程计的变化,让 base_footprint 的位置始终与 scanmatcher_frame 保持一致。
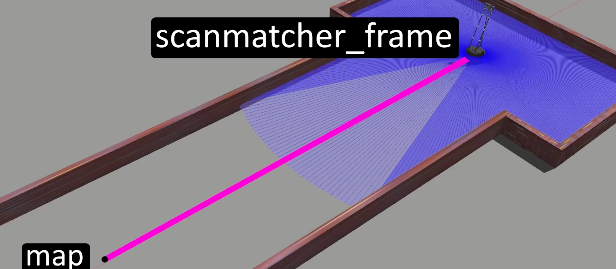
直接将雷达点云匹配得到的位移是scanmatcher_frame
roslaunch wpr_simulation wpb_corridor_hector.launch
Gmapping 是另一种常用的 SLAM 算法,其核心思想是先使用里程计推算机器人的位移,然后通过雷达点云贴合障碍物轮廓来修正里程计的误差。在 Gmapping 中,机器人的位移主要由里程计推算,激光雷达点云配准算法只是为了修正里程计的误差。Gmapping 的输出是 map 到 odom 再到 base_footprint 的 TF。
在运行 Gmapping 时,当机器人进入两侧墙体平滑的走廊,map 和 odom 的位置开始分离,并且出现了明显的跳动。这是由于激光雷达点云和障碍物配准导致的定位跳动。尽管如此,由于里程计还在运转,机器人的定位还是在继续推进的,最终的建图结果和实际场地基本保持一致。
map到odom的位置是障碍物点云匹配的偏移
odom到base_footprint是里程计的偏移
Gmapping
roslaunch wpr_simulation wpb_stage_robocup.launch
rosrun gmapping slam_gmapping
slam_gmapping 是一个 ROS(Robot Operating System)节点,用于同时定位与建图(SLAM)。它接收激光扫描数据(sensor_msgs/LaserScan)并构建地图(nav_msgs/OccupancyGrid)。地图可以通过 ROS 主题或服务获取。
- 订阅主题
tf (tf/tfMessage)
作用:提供激光、基座和里程计之间的坐标变换。
说明:这些变换是构建地图和定位机器人所必需的。
scan (sensor_msgs/LaserScan)
作用:接收激光扫描数据,用于创建地图。
说明:激光扫描数据是构建地图的主要输入数据。 - 发布主题
map_metadata (nav_msgs/MapMetaData)
作用:获取地图元数据。
说明:该主题发布地图的元数据,包括地图的分辨率、尺寸等信息。数据会被缓存并定期更新。
map (nav_msgs/OccupancyGrid)
作用:获取地图数据。
说明:该主题发布地图数据,表示为占用网格(Occupancy Grid)。数据会被缓存并定期更新。
~entropy (std_msgs/Float64)
作用:估计机器人位姿分布的熵。
说明:熵值越高表示机器人位姿的不确定性越大。这是从 1.1.0 版本开始新增的功能。 - 所需的坐标变换
<传入扫描的坐标系> → base_link
作用:将激光扫描数据从激光坐标系转换到机器人基座坐标系。
说明:这通常是一个固定的变换,由 robot_state_publisher 或 tf static_transform_publisher 定期广播。
base_link → odom
作用:将机器人基座坐标系与里程计坐标系关联。
说明:这通常由里程计系统提供,例如移动基座的驱动程序。 - 提供的坐标变换
map → odom
作用:提供机器人在地图坐标系中的当前位姿估计。
说明:该变换表示机器人在地图中的位置和姿态。
roslaunch wpr_simulation wpb_stage_robocup.launch
rosrun rqt_tf_tree rqt_tf_tree
rosrun gmapping slam_gmapping
rviz
rosrun wpr_simulation keyboard_vel_ctrl
launch 启动gmapping
<launch>
<include file="$(find wpr_simulation)/launch/wpb_stage_robocup.launch" />
<node pkg="gmapping" type="slam_gmapping" name="slam_gmapping" />
<node pkg="rviz" type="rviz" name="rviz" args="-d $(find slam_pkg)/rviz/gmapping.rviz" />
<node pkg="wpr_simulation " type="keyboard_vel_ctrl " name="keyboard_vel_ctrl " />
</launch>
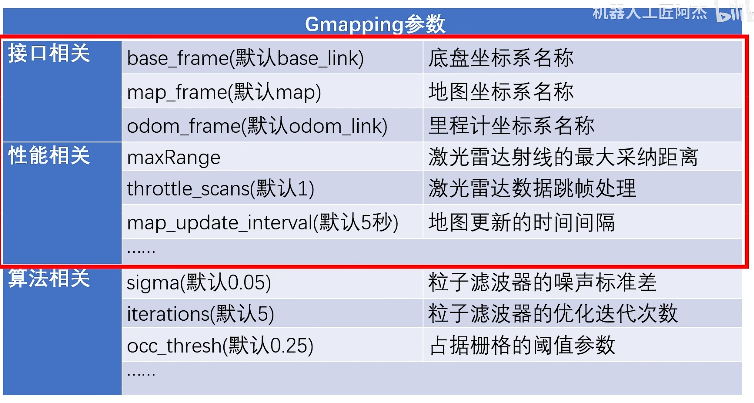
gmapping参数设置

<launch>
<include file="$(find wpr_simulation)/launch/wpb_stage_robocup.launch" />
<node pkg="gmapping" type="slam_gmapping" name="slam_gmapping" >
<param name="maxUrange" value="3.0" />
<param name="map_update_interval" value="0.5" />
<param name="linearUpdate" value="0.1" />
</node>
<node pkg="rviz" type="rviz" name="rviz" args="-d $(find slam_pkg)/rviz/gmapping.rviz" />
<node pkg="wpr_simulation " type="keyboard_vel_ctrl " name="keyboard_vel_ctrl " />
</launch>
保存和加载地图
map_server 是 ROS(Robot Operating System)中的一个重要功能包,主要用于处理地图数据。它提供了两个主要功能:map_server 节点和 map_saver 命令行工具。以下是对其功能的详细解释:
- map_server 节点
map_server节点从磁盘读取地图文件,并通过 ROS 服务提供地图数据。地图数据通常以两种文件格式存储:
- YAML 文件:描述地图的元数据,包括地图的分辨率、原点、阈值等信息。
- 图像文件:通常是
.pgm或.png格式,表示地图的占用情况。图像中的每个像素对应地图中的一个单元格,像素的颜色值表示该单元格的占用状态(自由、占用或未知)。
主要功能:
- 发布地图数据:
map_server节点会发布两个主题:map_metadata:发布地图的元数据(如分辨率、原点等)。map:发布地图的占用网格数据(OccupancyGrid)。
- 提供服务:
map_server还提供一个static_map服务,允许其他节点通过服务调用获取地图数据。
使用示例:
rosrun map_server map_server mymap.yaml
这个命令会启动 map_server 节点,并加载 mymap.yaml 文件中指定的地图。
- map_saver 工具
map_saver是一个命令行工具,用于将地图保存到磁盘。它通常用于保存通过 SLAM(同步定位与地图构建)生成的地图。
主要功能:
- 保存地图:
map_saver会从指定的 ROS 主题中读取地图数据,并将其保存为.pgm和.yaml文件。
默认主题:/map(消息类型:nav_msgs/OccupancyGrid)
自定义主题:可以通过 map:=<topic_name> 指定其他主题。 - 自定义阈值:可以通过
--occ和--free参数设置占用和自由区域的阈值。
使用示例:
rosrun map_server map_saver -f mymap
这个命令会将地图保存为 mymap.pgm 和 mymap.yaml 文件。
- 地图格式
地图由两个文件组成:
- YAML 文件:包含地图的元数据,如分辨率、原点、阈值等。
- 图像文件:包含地图的占用数据,通常为灰度图像,白色表示自由区域,黑色表示占用区域,灰色表示未知区域。
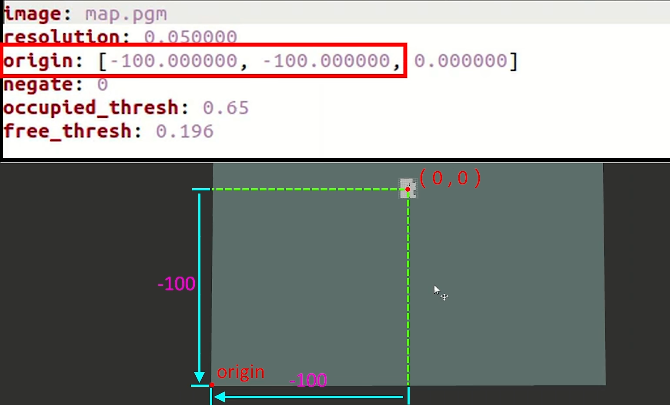
YAML 文件示例:
image: testmap.png
resolution: 0.1
origin: [0.0, 0.0, 0.0]
occupied_thresh: 0.65
free_thresh: 0.196
negate: 0
-
image:图像文件的路径。 -
resolution:地图的分辨率,单位为米/像素。 -
origin:地图中左下角像素的二维位姿,格式为 (x, y, yaw),其中 yaw 表示逆时针旋转(yaw=0 表示无旋转)。目前系统的许多部分都忽略了 yaw。
-
occupied_thresh和free_thresh:分别表示占用和自由区域的阈值。 -
negate:是否反转图像的语义(黑白反转)。
- 值解释
地图中的像素值可以解释为三种状态:
- Trinary(三元):像素值被解释为自由(0)、占用(100)或未知(-1)。
- Scale(缩放):像素值被解释为介于自由和占用之间的渐变值。
- Raw(原始):直接使用像素的原始值。


















 1758
1758

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











