







 文章介绍了车辆横向动态模型,包括自行车模型和线性简化模型,阐述了模型参数辨识的过程。接着讨论了LQR(线性二次调节器)的概念及其在一维标量示例中的应用。同时,探讨了车辆横向最优控制,特别是如何利用LQR进行轨迹跟踪,并提出了预览轨迹跟踪的方法来优化性能。LQR控制器的优势在于其优化性能,但也存在对大曲率路径处理不佳和短视的问题。
文章介绍了车辆横向动态模型,包括自行车模型和线性简化模型,阐述了模型参数辨识的过程。接着讨论了LQR(线性二次调节器)的概念及其在一维标量示例中的应用。同时,探讨了车辆横向最优控制,特别是如何利用LQR进行轨迹跟踪,并提出了预览轨迹跟踪的方法来优化性能。LQR控制器的优势在于其优化性能,但也存在对大曲率路径处理不佳和短视的问题。
横向动态模型
1.横向控制动态模型
a.自行车动态模型
在车辆高速行驶的时候、每个车轮上的方向和车辆的方向一致的假设就不成立,即non-zero slip angle
汽车动力学模型:伸出右手-中指向上☞、食指向前,拇指向右;其中食指->Roll、拇指->pitch、中指->Yao.
b.线性自行车动态模型
自行车运动学模型:
自行车模型做出如下假设:
- 纵向速度恒定、左右车轮集中成一个车轮
- 忽略悬架运动、道路的倾斜、空气阻力影响,以便对汽车的纵向和横向的运动解耦分析;
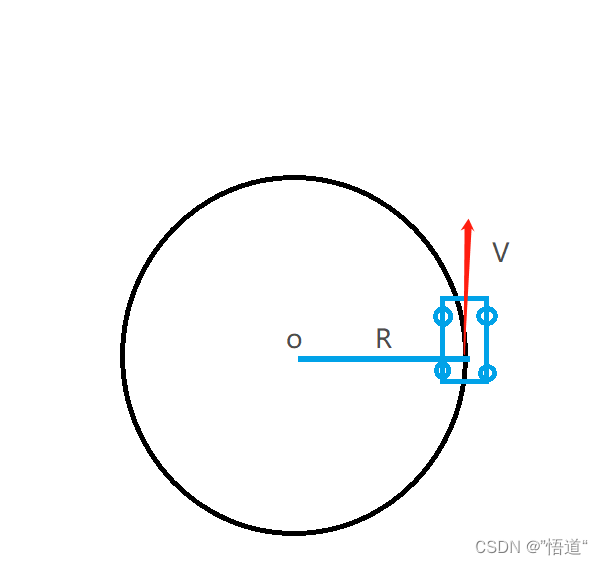 ψ
˙
=
V
R
;
F
(
向心
)
=
V
x
2
R
\dot{\psi}=\frac{V}{R}; F( 向心)=\frac{V_{_x}^2}{R}
ψ˙=RV;F(向心)=RVx2
ψ
˙
=
V
R
;
F
(
向心
)
=
V
x
2
R
\dot{\psi}=\frac{V}{R}; F( 向心)=\frac{V_{_x}^2}{R}
ψ˙=RV;F(向心)=RVx2
代入上式
a y = ( d 2 y d t 2 ) = m ( v v + v x ψ ˙ ˙ ) a_{_y}=(\frac{d^2y}{dt^2})=m(\dot{v_{_v}+v_{_x}\dot{\psi}}) ay=(dt2d2y)=m(vv+vxψ˙˙)
l f ⋅ F y f − l r ⋅ F y r = I z ψ ¨ l_{_f}\cdot{F_{_{yf}}}-l_{_r}\cdot{F_{_{yr}}}=I_{_z}\ddot{\psi} lf⋅Fyf−lr⋅Fyr=Izψ¨
我们可以使用 r = ψ ˙ r=\dot{\psi} r=ψ˙代表偏航角yaw的角速度
在经过了大量的轮胎打滑实验得出结论:
对于slip-angles较小时,实现得到轮胎滑移角的线性函数
轮胎变量 - 前轮滑移角 α f \alpha_{_f} αf
- 后轮滑移角 α r \alpha_{_r} αr
前后轮侧向力
轮胎滑移角(split_angles)针对与轮胎和车辆的纵轴而言;
对于小split-angles,实验证明,轮胎侧向力与“split-angles”呈现正比关系
F
y
f
=
2
C
f
α
f
=
2
C
f
(
δ
−
θ
v
f
)
F_{_{yf}}=2C_{_f}\alpha{_{_f}}=2C_{_f}(\delta-\theta_{_{vf}})
Fyf=2Cfαf=2Cf(δ−θvf)
F
y
r
=
2
C
r
α
r
=
2
C
r
(
δ
−
θ
v
r
)
F_{_{yr}}=2C_{_r}\alpha{_{_r}}=2C_{_r}(\delta-\theta_{_{vr}})
Fyr=2Crαr=2Cr(δ−θvr)
对于自行车模型的前轮,前轮速度方向和在车身x轴和y轴的分量构成直角三角形
θ
v
f
=
t
a
n
−
1
v
f
y
v
f
x
=
t
a
n
−
1
(
v
y
+
l
r
r
V
x
)
\theta_{_{vf}}=tan^{-1}\frac{v_{_{fy}}}{v_{_{fx}}}=tan^{-1}(\frac{v_{_y}+l_{_r}r}{V_{_x}})
θvf=tan−1vfxvfy=tan−1(Vxvy+lrr)
θ
v
r
=
t
a
n
−
1
v
r
y
v
r
x
=
t
a
n
−
1
(
v
y
−
l
r
r
V
x
)
\theta_{_{vr}}=tan^{-1}\frac{v_{_{ry}}}{v_{_{rx}}}=tan^{-1}(\frac{v_{_y}-l_{_r}r}{V_{_x}})
θvr=tan−1vrxvry=tan−1(Vxvy−lrr)
当
r
=
ψ
˙
r=\dot{\psi}
r=ψ˙偏航速度等于偏航轴角速度
由于牛顿第一定律
F
˙
y
f
+
F
˙
y
r
=
m
a
y
=
m
(
v
y
˙
+
v
x
ψ
˙
)
\dot{F}_{_{yf}}+\dot{F}_{_{yr}}=ma_{_y}=m(\dot{v_{_y}}+v_{_x}\dot{\psi})
F˙yf+F˙yr=may=m(vy˙+vxψ˙)
l
f
F
˙
−
l
r
F
˙
y
r
=
I
z
ψ
¨
l_{_f}\dot{F}-l_{_r}\dot{F}_{_{yr}}=I_{_z}\ddot{\psi}
lfF˙−lrF˙yr=Izψ¨
(
F
y
f
c
o
s
(
δ
)
−
F
x
f
s
i
n
(
δ
)
)
+
F
y
r
=
m
(
v
y
˙
+
v
x
r
)
(F_{_{yf}}cos(\delta)-F_{_{xf}}sin(\delta)) + F_{_{yr}}=m(\dot{v_{_y}}+v_{_x}r)
(Fyfcos(δ)−Fxfsin(δ))+Fyr=m(vy˙+vxr)
l
f
(
F
y
f
c
o
s
(
δ
)
−
F
x
f
s
i
n
(
δ
)
)
−
l
r
F
y
r
=
I
z
ψ
¨
=
I
z
r
˙
l_{_f}(F_{_{yf}}cos(\delta)-F_{_{xf}}sin(\delta))-l_{_r}F_{_{yr}}=I_{_z}\ddot{\psi}=I_{_z}\dot{r}
lf(Fyfcos(δ)−Fxfsin(δ))−lrFyr=Izψ¨=Izr˙
总结所示的横向力(假设纵向速度是可控的)
其中r是关于偏航角的角速度
摒弃上节所讲滑移约束,假设是匀速运动
可以通过:
α
f
=
δ
−
t
a
n
−
1
(
v
y
+
l
f
r
v
x
)
\alpha_{_f}=\delta-tan^{-1}(\frac{v_{_y}+l_{_f}r}{v_{_x}})
αf=δ−tan−1(vxvy+lfr)
α
r
=
−
t
a
n
−
1
(
v
y
−
l
r
r
v
x
)
\alpha_{_r}=-tan^{-1}(\frac{v_{_y}-l_{_r}r}{v_{_x}})
αr=−tan−1(vxvy−lrr)
F
y
f
=
c
f
α
f
=
c
f
[
θ
−
t
a
n
−
1
(
v
f
+
l
r
r
v
x
)
]
F_{_{yf}}=c_{_f}\alpha_{_f}=c_{_f}[\theta-tan^{-1}(\frac{v_{_f}+l_{_r}r}{v_{_x}})]
Fyf=cfαf=cf[θ−tan−1(vxvf+lrr)]
F
y
r
=
c
r
α
r
=
−
c
r
t
a
n
−
1
(
v
y
−
l
r
r
v
x
)
F_{_{yr}}=c_{_r}\alpha_{_r}=-c_{_r}tan^{-1}(\frac{v_{_y}-l_{_r}r}{v_{_x}})
Fyr=crαr=−crtan−1(vxvy−lrr)
得到:
v
˙
y
=
c
f
[
θ
−
t
a
n
−
1
(
v
y
+
l
f
r
v
x
)
]
c
o
s
(
δ
)
−
c
r
t
a
n
−
1
(
v
y
−
l
r
r
v
x
)
−
F
x
y
s
i
n
(
δ
)
m
−
v
x
r
\dot{v}_{_y}=\frac{c_{_f}[\theta{}-tan^{-1}(\frac{v_{_y}+l_{_f}r}{v_{_x}})]cos(\delta)-c_{_r}tan^{-1}(\frac{v_{_y}-l_{_r}r}{v_{_x}})-F_{_{xy}}sin(\delta)}{m}-v_{_x}r
v˙y=mcf[θ−tan−1(vxvy+lfr)]cos(δ)−crtan−1(vxvy−lrr)−Fxysin(δ)−vxr
r
˙
=
l
f
c
f
[
δ
−
t
a
n
−
1
(
v
y
+
l
f
r
v
x
)
]
+
l
r
c
r
t
a
n
−
1
(
v
y
−
l
r
r
v
x
)
−
l
f
F
x
f
s
i
n
(
δ
)
I
z
\dot{r}=\frac{l_{_f}c_{_f}[\delta-tan^{-1}(\frac{v_{_y}+l_{_f}r}{v_{_x}})]+l_{_r}c_{_r}tan^{-1}(\frac{v_{_y}-l_{_r}r}{v_{_x}})-l_{_f}F_{_{xf}}sin(\delta)}{I_{_z}}
r˙=Izlfcf[δ−tan−1(vxvy+lfr)]+lrcrtan−1(vxvy−lrr)−lfFxfsin(δ)
1.应用小角度假设简化模型
*假设
δ
\delta
δ=0 所以
s
i
n
(
δ
)
≈
0
,
c
o
s
(
δ
)
≈
1
,
t
a
n
−
1
(
δ
)
≈
θ
sin(\delta)\approx0,cos(\delta)\approx1,tan^{-1}(\delta)\approx\theta
sin(δ)≈0,cos(δ)≈1,tan−1(δ)≈θ集合上面的两个式子得到
v
˙
y
=
−
c
f
v
y
−
c
f
l
f
r
m
v
x
+
c
f
δ
m
+
−
c
r
v
y
+
c
r
l
r
r
m
v
x
−
v
x
r
\dot{v}_{_y}=\frac{-c_{_f}v_{_y}-c_{_f}l_{_f}r}{mv_{_x}}+\frac{c_{_f}\delta}{m}+\frac{-c_{_r}v_{_y}+c_{_r}l_{_r}r}{mv_{_x}}-v_{_x}r
v˙y=mvx−cfvy−cflfr+mcfδ+mvx−crvy+crlrr−vxr
r
˙
=
−
l
f
c
f
v
y
−
l
f
2
c
f
r
I
z
v
x
+
l
f
c
f
δ
I
z
+
l
z
c
r
v
y
−
l
2
c
r
r
I
z
v
x
\dot{r}=\frac{-l_{_f}c_{_f}v_{_y}-l^{2}_{_f}c_{_f}r}{I_{_z}v_{_x}}+\frac{l_{_f}c_{_f}\delta}{I_{_z}}+\frac{l_{_z}c_{_r}v_{_y}-l^{2}c_{_r}r}{I_{_z}v_{_x}}
r˙=Izvx−lfcfvy−lf2cfr+Izlfcfδ+Izvxlzcrvy−l2crr
2.根据变量重新分类
c.模型参数辨识
与之前的模型不同,动态自行车模型的参数没有那么方便直接测量,然而一个可行的办法就是给车的四个轮子下放上称;用一根无质量的杆将两个点质量结合在一起;
车辆的转动惯量,近似的看作
2.LQR-线性二次调节器
a.什么是Lqr
b.一维标量示例
c.通解和Raccati方程
d.LQR使用案例
3.车辆横向最优控制
a.路径坐标模型
b.使用Lqr进行轨迹跟踪
c.带有Preview的轨迹跟踪
lqr的好处:若我们将系统设置为以误差为参考的系统,就可以直接套用lqr的结论得到一个相对优化的控制器。并且在实验的过程中如果,横向误差收敛的很慢,可以考虑提高;若前轮转角出现震荡,可以考虑降低;
lqr的缺点:
1、由于lqr是一个线性控制器,默认小 ,面对曲率过大的情况表现不佳;2、lqr只关注于当前点的情况,并没有考虑到未来路径的情况,即较短视;
lqr性能的提高
思路:用已知的路径做出预判,提前打方向盘,就可以提高性能


















 1270
1270

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









